 2018-02-13
2018-02-13 258
258ЗАЧЕТНАЯ РАБОТА
По курсу «Математическое моделирование в
строительстве»
Выполнила студентка гр. СТ-25
Максименко Д.А.
Принял преподаватель
Буравлев В.Ф.
Киров 2014
Вариант 15-В
q(x)= q0 
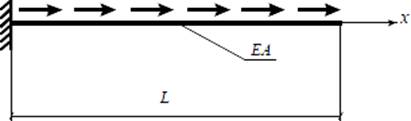
Рис. 1. Расчетная схема
Точное решение
Дифференциальное уравнение равновесия имеет вид:
 . (1.1)
. (1.1)
Дважды интегрируем
 1;
1;
 1x+ C2. (1.2)
1x+ C2. (1.2)
Удовлетворяем геометрическому граничному условию на левом торце
u(0) = 
откуда
 (1.3)
(1.3)
Удовлетворяем статические граничные условия на правом торце
 1 = 0,
1 = 0,
откуда
 .(1.4)
.(1.4)
Внося полученные константы интегрирования (1.3) и (1.4) во второе
соотношение (1.2), приходим к выражению для продольного перемещения
 (1.5)
(1.5)
Умножая на EА и беря производную по x, получим выражение для
нормального усилия
 (1.6)
(1.6)
Произведем расчет перемещений и усилий по формулам (1.5) и (1.6) c
помощью программы на языке программирования «Pascal» в пяти
равноотстоящих точках и сведем результаты расчета в таблицу 1.
PROGRAM STTP;
usescrt;
Const
g=1.0; EA=1.0; l=1.0; m=4;
Var
i:integer;
dx,x,x2,nn,uu: real;
u,n: array[1..m+1] of real;
Begin
clrscr;
writeln;
writeln ('Результатырасчета');
writeln;
writeln ('Координаты перемещения усиления');
dx:=l/m;
nn:=g*l/2;
uu:=nn*l/(4*EA);
fori:=1 to m+1
do begin;
x:=dx*(i-1)/l;
x2:=sqr(x);
U[i]:= {uu*} (-exp(2*x)-x*x*x*x+2*x*(exp(2)+2)+1);
N[i]:= {nn*} ((-exp(2*x)-2*x*x*x+exp(2)+2));
writeln;
writeln ('x=', x:4:2, ' U= ', u[i]:6:3, ' N=', N[i]:6:3);
readln;
End.
Представим результаты расчета в виде таблицы 1 и графиков (рис. 2 и 3)
Таблица 1
| х | 0 | 0,25 | 0,5 | 0,75 | 1 |
|
| 0 | 4.042 | 7.608 | 10.285 | 11.389 |
|
| 8.389 | 7.709 | 6.421 | 4.064 | 0 |
Рис. 2. Изменение перемещения по длине стержня (точное решение)
Рис. 3. Изменение продольного усилия по длине стержня (точное решение)
Приближенные решения
Метод конечных разностей
Обозначим узловые точки (1-5) в местах разбиения стержня на четыре
элемента и введем законтурную точку 6 (рис. 4).
q(x)= q0
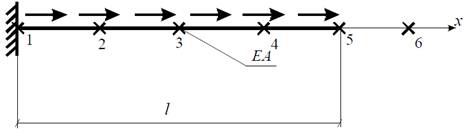
Рис. 4. Разбиение стержня на элементы
Запишем дифференциальное уравнение в конечно-разностной форме
ui-1  2ui+ ui+1= 𝛼 . (2.1.1)
2ui+ ui+1= 𝛼 . (2.1.1)
Здесь введено обозначение
𝛼 =  . (2.1.2)
. (2.1.2)
Запишем уравнение для всех внутренних точек, причем для крайней
правой точки 5 запишем статическое граничное условие через законтурную
точку 6:
i = 2; u1 – 2u2 + u3 = 1,8361𝛼;
i = 3; u2 – 2u3 + u4 = 3.468 𝛼;
i = 4; u3 – 2u4 + u5 =6.1685 𝛼; (2.1.3)
i = 5; u4 – 2u5 + u6 = 5.1938𝛼;
 .
.
Выполним прямой ход, учитывая левое геометрическое граничное
условие (u 1= 0):
u6 =u5;
u4 – 2u5 + u5 = 5.1938𝛼⟹ u5=u4 – 5.1938𝛼;
u3 – 2u4 + u4 – 5.1938𝛼 = 6.1685 𝛼⟹ u4=u3 – 11.3623𝛼; (2.1.4)
u2 – 2u3 + u3 – 11.3623𝛼 = 3.468 𝛼⟹ u3=u2 –14.8303 𝛼;
u1 – 2u2 + u2 – 14.8303𝛼 = 1.8361𝛼⟹ u2= – 16.6664𝛼.
Выполним обратный ход, раскрывая 𝛼 и приводя результат к размерности
точного решения:(2.1.5)




Осуществим переход к нормальным усилиям с учетом размерностей
для перемещений и усилий в точном решении при помощи соотношения
 (2.1.6)
(2.1.6)
где черта над u обозначает, что берутся только ее численные значения.




(2.1.7)
Воспользуемся соотношением, осуществляющим переход к усилиям с
помощью дифференцирующей матрицы
 , (2.1.8)
, (2.1.8)
которое в раскрытом виде с учетом числа элементов (h=l/4) и размерностей,
использованных для перемещений и усилий в точном решении, запишется
так:
 (2.1.9)
(2.1.9)
Результаты расчета представим в виде таблицы 2 и графиков (рис. 5,6).
Таблица 2
| x | 0 | 0,25 | 0,5 | 0,75 | 1,0 |

| 0 (0) | 4.167 (4.042) | 7.874 (7.608) | 10.714 (10.285) | 12.0132 (11.389) |

|  * *
 **
(8.389) **
(8.389)
|  * *
 **
(7.709) **
(7.709)
| 5.68*
 **
(6.421) **
(6.421)
| 2.599*
 **
(4.064) **
(4.064)
| -*
 **
(0) **
(0)
|
(…) – точное решение; *- решение в рамках МКР; **- решение с помощью
дифференцирующей матрицы.
Рис. 5. Изменение перемещения по длине стержня (метод конечных
разностей)
Рис. 6. Изменение продольного усилия по длине стержня (метод конечных
разностей)








