 2018-02-13
2018-02-13 2670
2670МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Тверской государственный университет»
Кафедра общей физики
Лаборатория механики
Лабораторная работа №12
Изучение законов движения тел в поле силы тяжести на машине Атвуда
Тверь
2012
Цель работы: изучение динамики поступательного движения связанной системы тел;
Приборы и принадлежности: машина Атвуда, набор грузов и перегрузков.
Введение
 Принцип работы машины Атвуда основан на использовании законов свободного падения тела в воздухе.
Принцип работы машины Атвуда основан на использовании законов свободного падения тела в воздухе.
Через ролик, монтированный на подшипнике таким образом, чтобы он мог вращаться с возможно малым сопротивлением, проходит нитка с двумя одинаковыми грузами массой  каждый. Следовательно, система находиться в равновесии (масса М =60 гр.).
каждый. Следовательно, система находиться в равновесии (масса М =60 гр.).
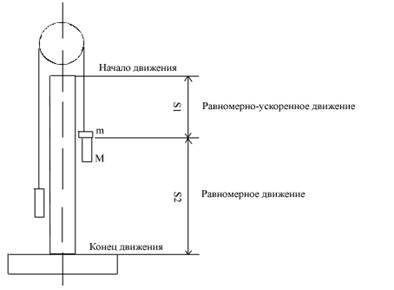
Если на одну сторону блока прибавим небольшой перегрузок массой  , тогда система – два груза и небольшой перегрузок – получат ускорение под действием перегрузка, и, передвигаясь с ускорением, пройдёт путь
, тогда система – два груза и небольшой перегрузок – получат ускорение под действием перегрузка, и, передвигаясь с ускорением, пройдёт путь  .
.
На кольце перегрузок будет отцеплен, и грузы пройдут, теперь уже в равномерном движении, путь  .
.
Механическая конструкция машины Атвуда
Общий вид машины Атвуда показан на рис.1. На вертикальной колонне /1/, закреплённой в основании, закреплены три кронштейна: неподвижный кронштейн и два подвижных кронштейна – средний /4/ и верхний /5/, а также верхняя втулка /6/.
 Основание оснащено регулируемыми ножками, которые позволяют провести выравнивание положения машины.
Основание оснащено регулируемыми ножками, которые позволяют провести выравнивание положения машины.
На верхней втулке, при помощи верхнего диска закреплён узел подшипника ролика, ролик /10/ и электромагнит.
Через ролик проходит нить /12/ с привязанными на её концах грузами /13/ и /14/
Электромагнит, после подведения к нему питающего напряжения, при помощи фрикционной муфты, удерживает систему ролика с грузами в состоянии покоя.
Верхний и средний кронштейны можно перемещать вдоль колонки, фиксировать в любом положении, устанавливая, таким образом, длину пути равномерно-ускоренного и равномерного движения. Для облегчения определения их путей на колонке имеется миллиметровая шкала /15/. Все кронштейны имеют указатель положения, а верхний кронштейн дополнительную черту, облегчающую точное согласование нижней грани верхнего, большего груза с определённым началом пути движения.
На среднем кронштейне закреплён кронштейн /кольцо/ и фотоэлектрический датчик /17/. Кронштейн /кольцо/ снимает с падающего вниз груза дополнительный перегрузок, а фотоэлектрический датчик в это время образует электрический импульс, сигнализирующий начало равномерного движения грузов. Оптическая ось фотоэлектрического датчика /черта на его корпусе/ находится на уровне указателя положения среднего кронштейна.
Нижний кронштейн оснащён двумя кронштейнами с резиновыми амортизаторами, в которые ударяет завершающий своё движение груз, а также фотоэлектрическим датчиком /19/ с оптической осью на уровне указателя кронштейна, после пересечения которого нижней гранью падающего груза образуется электрический сигнал, сигнализирующий прохождение грузами определённого пути.
У основания прибора находиться жёстко прикреплённый к нему миллисекундомер /20/.
 |
| Рис. 2 |
Теоретическая часть
Рассмотрим два груза одинаковой массы М, связанные тонкой нерастяжимой и невесомой нитью, перекинутой через блок радиуса R (рис.2). Если на правый груз поместить перегрузок массой m, то вся система начнёт двигаться равноускоренно. На каждый груз при этом будут действовать две силы – сила тяжести и сила натяжения нити. Запишем второй закон Ньютона для правого груза массы  и левого груза массы :
и левого груза массы :
 (1)
(1)
Блок не движется поступательно, а только вращается. Уравнение вращательного движения блока массы  имеет вид:
имеет вид:
 . (2)
. (2)
Здесь  – момент сил, действующих на блок,
– момент сил, действующих на блок,  – момент инерции блока относительно его оси симметрии,
– момент инерции блока относительно его оси симметрии,  – угловая скорость вращения блока. На блок действуют сила тяжести, сила реакции, сила трения и две силы натяжения нити
– угловая скорость вращения блока. На блок действуют сила тяжести, сила реакции, сила трения и две силы натяжения нити  и
и  . Если считать, что сила трения пренебрежимо мала, то из всех сил только силы натяжения нити создают отличный от нуля момент вращения блока относительно его оси симметрии. Вектор угловой скорости и вектор углового ускорения
. Если считать, что сила трения пренебрежимо мала, то из всех сил только силы натяжения нити создают отличный от нуля момент вращения блока относительно его оси симметрии. Вектор угловой скорости и вектор углового ускорения  направлены вдоль оси
направлены вдоль оси  , совпадающей с осью симметрии блока. Движение же грузов происходит вдоль оси
, совпадающей с осью симметрии блока. Движение же грузов происходит вдоль оси  . Спроецируем (1) и (2) на эти оси:
. Спроецируем (1) и (2) на эти оси:
 (3)
(3)
Здесь мы для общности рассмотрения не указываем направление ускорений, хотя из постановки задачи ясно, что правый груз будет двигаться вниз, т.е. проекция его ускорения положительна.
Задание 1. Покажите, что
1. Т.к. нить невесома, то  и
и  .
.
2. Момент силы  относительно оси симметрии блока равен
относительно оси симметрии блока равен  , а момент силы
, а момент силы  равен
равен  .
.
Т.к. нить нерастяжима, то её длина не изменяется. Поэтому  . Дифференцируя последнее равенство по времени, получим связь скоростей и ускорений грузов
. Дифференцируя последнее равенство по времени, получим связь скоростей и ускорений грузов

Т.е. ускорения грузов одинаковы по величине. В связи с выше изложенным, уравнения (3) примут следующий вид:
Т.к. нить не проскальзывает по блоку, то  (почему?). В итоге имеем следующую систему из трёх уравнений относительно трёх неизвестных
(почему?). В итоге имеем следующую систему из трёх уравнений относительно трёх неизвестных  :
:
 (4)
(4)
Решая систему (4), найдём ускорение грузов (решите систему самостоятельно!):
 . (5)
. (5)
Если массой блока пренебречь, то, во-первых придём к равенству сил натяжения нитей  , а во-вторых ускорение грузов станет равным
, а во-вторых ускорение грузов станет равным
 . (6)
. (6)
Если нет перегрузка, то, как следует из (5), ускорения грузов равны нулю, т.е. грузы движутся равномерно (и проходят путь ).
Ускорение (6) может быть найдено также из кинематических соображений. Пусть – расстояние, которое проходит груз при равноускоренном движении (до снятия перегрузка, т.е. от белой линии до фотодатчика). К моменту достижения перегрузком среднего кронштейна скорость груза будет удовлетворять следующему соотношению:
 . (7)
. (7)
После снятия перегрузка движение груза станет равномерным, поэтому
 . (8)
. (8)
Здесь – это расстояние между средним и нижним кронштейнами; (от фотодатчика среднего кронштейна до фотодатчика нижнего кронштейна),  – время, регистрируемое миллисекундомером. Из (7) и (8) находим
– время, регистрируемое миллисекундомером. Из (7) и (8) находим
 . (9)
. (9)
Сравнивая экспериментальное значение для ускорения, найденное по формуле (9), со значением, рассчитанным согласно (6), можно приблизительно проверить выполняемость второго закона Ньютона при движении тел в поле сил земного тяготения.








