2018-02-13
2018-02-13 812
812Для студентов специальности
Металлорежущие станки и инструменты».
Набережные Челны
2005 год
УДК 621.9.06.001.63.(076)
Методические указания к изучению курса «Металлорежущие станки». Составитель Ведерников Ю.А. - Набережные Челны: КамПИ 2005 г.
Рецензент доктор технических наук КамПИ С.В. Дмитриев.
Печатается по решению научно-методического совета Камского государственного политехнического института
Камский Государственный Политехнический Институт
2005 г.
Рабочая программа
По Металлорежущим станкам (МРС)
(наименование дисциплины)
| Факультет Заочный (З/О) 4 года | З/О 6 года | Д/о |
| Кафедра ТМ,МС и И | ТМ,МС и И |
|
| Курс 3 | 5 |
|
| Семестр 6 | 9/10 | 7/8 |
| Лекции 6 часов | 20 (10/10) | 34/34 |
| В том числе: |
|
|
| Установочные 2 часа | 8(4/4) 2 |
|
| Обзорные 4 часа | 12(6/6) 5 |
|
| Лабораторные работы 4 часа | 10(10/0) | 17/0 |
| Практические (семинарские) |
| 0/17 |
| Занятия 4 часа | 6(0/6) |
|
| Курсовая работа (проект) 1 | 1(0/10) | 0/1 |
| Количество 1 |
|
|
| Контрольные работы ____________ |
|
|
| Количество ____________________ |
|
|
| Самостоятельная работа 173 часа | 151 часов | 25/60 |
| Всего часов 187 часа | 187 часов | 187 |
| Экзамен 6 семестр | 10 семестров | 7,8 |
| Зачет ─ | 9 семестр |
|
для специальности 120100 «Технология машиностроения»
Набережные Челны
2005 г.
3
Рабочая программа составлена на основании типовой
(типовая программа,
программы по МРС 2001г.
дата утверждения)
Рабочая программа обсуждена на заседании кафедра ТМ, МС и И
(наименование кафедры)
прот. № 8 «24» апреля 2003 г.
Заведующий кафедрой А.П. Абызов
(Ф.И.О.)
_______________
(подпись)
Рабочая программа согласована с выпускающей кафедрой__________________ «___»_____200_г.
Заведующий кафедрой_________________
(Ф.И.О.)
_________________
(подпись)
Рабочая программа одобрена НМС (методической комиссией) института (факультета).
«14» марта 2003 г.
Председатель В.А. Козин
(Ф.И.О., подпись)
Декан факультета А.Х. Ахметшин
(Ф.И.О., подпись)
4
Курс «Металлорежущие станки», изучаемый студентами очного факультета в 7 - 8 семестрами опирается на 2 основных курсах: «Оборудование мелкосерийного производства» и «Эксплуатация машиностроительного оборудования», является их органическим развитием и дополнением.
Студентам заочного факультета этот курс легче изучать, если они на месте своей работы сумеет ознакомиться со станками с ЧПУ, автоматическими линиями, промышленными роботами и пр. и затем уже по рекомендуемой литературе изучать данный курс.
Студенты заочного отделения обучения 6 лет выполняют курсовой проект в 10ом семестре, студенты обучения 4 года выполняют курсовой проект в 6ом семестре (см. Методические указания к курсовому проекту).
В институте имеется зал курсового проектирования, где имеются образцы курсовых проектов и организованы консультации в течении семестра. К экзамену допускаются студенты, защитившие курсовой проект и лабораторно-практические работы. При кафедре имеется методический кабинет, где студент может получить необходимую литературу.
5
1. Цель и задачи дисциплины, её место в подготовке инженера данной специальности.
1.1. Введение.
Дисциплина «Металлорежущие станки: станки-автоматы, станки с ЧПУ, станочные системы» базируется на таких курсах, как: сопротивление материалов, теория механизмов, детали машин, электрические машины аппараты и др.
Особенностью преподавания этой дисциплины в КамГПИ является продолжение курса «Станки серийного производства», изучаемого в 7ом, 8ом и 9ом семестрах, где подробно рассматриваются вопросы конструкции, кинематики, наладки и эксплуатации универсального оборудования. Поэтому в 10ом семестре более подробно рассматриваются вопросы конструкции станков с ЧПУ, промышленных роботов, станков-автоматов, станочных систем, их конструирование и эксплуатация.
1.2. Цель преподавание дисциплины.
Обеспечить формирование профессионализма инженера-технолога в данной области. Научить их грамотно выбирать необходимое оборудование, заказывать и эксплуатировать.
1.3. В результате изучения курса студенты должны:
· Знать варианты конструкции основных узлов станков и их особенности, которые необходимо учитывать при конструировании, изготовлении и эксплуатации, показатели технического уровня станков;
· Уметь правильно подобрать область применения станков, организовать эксплуатацию и ремонт сложного оборудования, владеть необходимыми навыками проектирования узлов станка с учетом использования необходимых средств электро- и
гидроавтоматики, а также рациональные приемы наладки, проектирования, испытания, исследования технологического оборудования и станочных систем.
6
2. Содержание дисциплины.
9ый семестр.
Студенты заочного отделения (4 года обучения) сдают по всей программе экзамен в 6ом семестре (6 лет обучения - 9 и 10 семестрах).
2.1. Технико-экономические показатели станков.
2.1.1. Критерии работоспособности.(2 часа), /01/ стр. 21-30.
2.1.2. Одношпиндельные станки-автоматы и полуавтоматы. (4 часа).
2.1.2.1. Понятие автомат и полуавтомат, цикл автомата. Проблемы смены инструмента и обеспечение качества на автоматах.
2.1.2.2. Токарно-револьверные полуавтоматы, револьверные головки, командоаппараты. Способы настройки на размер. Механизмы подачи пруткового материала. Станок 1Г340: конструкция и наладка. /02/ стр. 77-81.
2.1.2.3. Токарные автоматы продольного точения. Фасонно-отрезные автоматы.
2.1.2.4. Токарно-револьверные автоматы. Принцип управления циклом от распределительного вала. Устройство и наладка токарно-револьверного автомата. Автомат 1Е140Г или 1Б136. Принцип проектирования кулачка продольного суппорта.(Методичка).
2.1.3. Многошпиндельные станки – полуавтоматы. (2 часа), /02/ стр. 122-138.
2.1.3.1. Параллельная, последовательная обработка деталей.
2.1.3.2. Горизонтальные многошпиндельные полуавтоматы. Принцип работы станка. Конструкция и наладка станка 1Б240-6.
2.1.3.3. Вертикальные многошпиндельные автоматы. Назначение. Принцип обработки. Конструкция и наладка станка 1К282. /02/ стр. 144-154.
2.1.4. Токарно-копировальные автоматы. (1,5 часа). Компоновка
7
токарных копировальных станков. Принцип однокоординатного и двухкоординатного гидрокопирования. Электрокопировальные системы с сухими электромагнитными муфтами. Копирование с задающей и зависимой подачей. /02/ стр. 138-143.
2.1.5. Фрезерно-копировальные станки. Принцип работы и назначение. (0,5 часа), /обзорная лекция/.
2.1.6. Агрегатные станки. (4 часа), /02/ стр. 539-542.
2.1.6.1. Назначение. Преимущества принципа агрегатирования. Операции, выполняемые на агрегатных станках. Компоновка агрегатных станков: станины, стойки, силовые головки, шпиндельные коробки, фрезерные расточные головки, поворотные столы. Устройство многошпиндельного сверлильного станка.
2.1.7. Токарные станки с ЧПУ. (4 часа). Структурная схема станка с ЧПУ. Компоновки станков с ЧПУ: горизонтальная, вертикальная, с наклонной станиной. Автоматизация смены инструмент на токарных станках. Наладка токарных станков с ЧПУ. /02/ стр. 29-36.
2.1.8. Токарные обрабатывающие центры. (2 часа). Назначение ОЦ. Типовые компоновки. Особенности конструкции приводов главного движения токарных ОЦ. Полярная координата токарных ОЦ. /02/ стр. 53-68, /Д4/.
2.1.9. Фрезерные, фрезерно-сверлильно-расточные станки с ЧПУ, станки типа ОЦ. (4 часа), /02/ стр. 186-211.
2.1.9.1. Особенности конструкций станков. Компоновка.
Механизмы крепления инструмента.
2.1.9.2. Способы автоматической смены инструмента. Конструкции систем автоматической смены инструментов. Инструментальные магазины, их конструкция, компоновки. Способы кодирования инструмента.
2.1.9.3. Наладка станков фрезерно-сверлильно-расточной группы.
2.1.10. Обзор конструкций станков с ЧПУ.(2 часа), /02/ стр. 434-436, /обзорная лекция/.
8
2.1.10.1. Обзор конструкций станков с ЧПУ, зуборезных станков с ЧПУ, сверлильных, расточных, агрегатных станков с ЧПУ.
2.1.10.2. Особенности эксплуатации станков с ЧПУ. Область рационального использования.
2.1.11. Промышленные роботы. (2 часа), /Д3/ стр. 147-170.
2.1.11.1. Промышленные роботы в производственных системах. Краткая историческая справка роботостроения. Возможность и область применения промышленных роботов в машиностроении.
2.1.11.2. Автооператоры, манипуляторы с ручным управлением, сбалансированные манипуляторы, краны с жестким подвесом груза. Специальные манипуляторы.
2.1.11.3. Термины и определение в области робототехники. Основные показатели промышленных роботов. Общие характеристики и классификации.
2.1.11.4. Координаты промышленных роботов. Структурные и кинематические схемы основных станочных промышленных роботов.
2.1.11.5. Конструктивные особенности узлов промышленных роботов. Конструкции промышленных роботов.
2.1.11.6. Модульные конструкции промышленных роботов.
2.1.11.7. Захватные устройства промышленных роботов.
2.1.11.8. Основы проектирования промышленных роботов.
2.1.12. Организация проектно-конструкторских работ. (2 часа), /Д3/ стр. 171-177.
2.1.12.1. Порядок и документация проектирования металлорежущих станков (МРС). /03/ стр. 123, 396-404.
2.1.12.2. Пути ускорения проектных работ. Роль вычислительной техники, систем автоматизированного проектирования. Постановка и использование экспериментальных и исследовательских работ.
2.1.12.3. Вопросы платёжности и патентной чистоты проектируемых станков. Стандартизация, унификация и агрегатирование в станкостроении.
9
2.1.12.4. Основы художественного конструирования в МРС.
2.1.12.5. Требования по технике безопасности, производственной санитарии и экологичности к промышленному оборудованию.
2.1.12.6. Технологичность деталей и узлов МРС.
2.1.12.7. Показатели технического уровня МРС. Оценка технологического уровня МРС.
2.1.12.8. Технико-экономическая оценка эффективности создания и внедрения в производство проектируемых МРС.
2.1.13. Анализ работоспособности станков. (2 часа), /03/ стр. 176-199.
2.1.13.1. Модель для оценки работоспособности станка. Процессы, протекающие при работе станка.
2.1.13.2. Начальные показатель качества станка. Точность, прочность, сопротивление усталости, жёсткость, составляющие других деформаций станка.
2.1.13.3. Стойкость станка к действию вредных процессов: колебательные процессы, износостойкость деталей и узлов станка.
2.1.14. Приводы главного движения в станках.(4 часа), /01/ стр.183, 221, /Д2/, /Д3/ стр. 131-205.
2.1.14.1. Анализ приводов главного движения, используемых в металлорежущих станках. Требования к приводам главного движения.
2.1.14.2. Определение исходных данных для проектирования привода главного движения.
2.1.14.3. Проектирование приводов главного движения со ступенчатым регулированием скорости. Графоаналитический расчёт коробки скоростей. Простые и сложные структуры коробки скоростей. Граничные условия.
2.1.14.4. Использование в приводах главного движения многоскоростных электрических двигателей вариаторов.
2.1.14.5. Способы управления переключением скоростей, блокировки.
10
2.1.14.6. Выбор двигателя. Динамика привода главного движения.
2.1.14.7. Особенности приводов главного движения, используемых в станках с ЧПУ. Регулировочные и эксплуатационные характеристики двигателей, используемых в приводах главного движения станков с ЧПУ. Требования к приводам главного движения станков с ЧПУ.
2.1.14.8. Проектирование приводов главного движения станков с ЧПУ. Определение параметров его составляющих: двигателя, ременной передачи, коробки скоростей. Особенности проектирования привода главного движения токарного станков с ЧПУ и станков фрезерно-сверлильно-расточной группы с ЧПУ.
10ый семестр.
2.1.15. Шпиндельные узлы. (4 часа), /03/ стр. 67-167, /Д2/.
2.1.15.1. Требования к шпиндельным узлам, нагрузочная способность, характеристики шпиндельных узлов.
2.1.15.2. Конструкции шпиндельных узлов. Конструкции шпинделей, материалы шпинделей.
2.1.15.3. Шпиндельные узлы на опорах качения. Конструкции опор качения. Роль предварительного натяга.
2.1.15.4. Проектирование шпиндельных узлов.
2.1.15.5. Баланс жёсткости шпиндельных узлов. Расчёт шпиндельных узлов на жёсткость.
2.1.15.6. Расчёт шпиндельных узлов на точность.
2.1.15.7. Расчёт шпиндельных узлов на виброустойчивость. Особенности проектирования высокоскоростных шпиндельных узлов.
2.1.15.8. Потери в шпиндельных узлах на опорах качения, тепловыделение.
2.1.15.9. Смазка шпиндельных узлов на опорах качения.
2.1.15.10. Эксплуатация шпиндельных узлов на опорах качения, проверка правильности создания натяга.
2.1.15.11. Защита шпиндельных опор. Смазка шпиндельных узлов на опорах качения. /07/ стр. 224-247, /Д2/.
11
2.1.15.12. Шпиндельные узлы на опорах скольжения. Особенности конструкции и эксплуатации.
2.1.15.13. Шпиндельные узлы на опорах с гидродинамической смазкой, конструкции, основы проектирования и эксплуатации.
2.1.15.14. Шпиндельные узлы на опорах с гидростатической
смазкой, конструирование, основы расчёта и эксплуатации.
2.1.15.15. Обзор конструкций и область применения шпиндельных узлов на опорах с газовой смазкой и на магнитных опорах.
2.1.16. Направляющие металлорежущих станков. (6 часов), /03/ стр. 174-244.
2.1.16.1. Требования, предъявляемые к направляющим. Устойчивость движения исполнительного механизма по направляющим.
2.1.16.2. Типы направляющих. Материалы в направляющих скольжения. Конструкции направляющих. Регулировка зазоров.
2.1.16.3. Смазка направляющих скольжения. Защита от загрязнения.
2.1.16.4. Проектирование и расчёт направляющих скольжения по допустимым нагрузкам и на жёсткость.
2.1.16.5. Направляющие качения, конструкции, область применения, характеристики. Способы регулирования зазора.
2.1.16.6. Проектирование и расчёт направляющих качения.
2.1.16.7. Направляющие смешанного трения.
2.1.16.8. Расчёт направляющих на долговечность.
2.1.16.9. Гидростатические направляющие, проектирование, основы расчёта, эксплуатация.
2.1.16.10. Обзор конструкций направляющих с гидродинамической, газовой смазкой. Использование гидро- и аэроразгрузки при перемещение узлов станка по направляющим.
12
2.1.17. Привод подачи в металлорежущих станках. (4 часа), /01/ стр. 200-220, /Д1/.
2.1.17.1. Типы приводов подачи металлорежущих станков, их конструктивные разновидности. Требование к приводам подачи.
2.1.17.2. Проектирование приводов подачи универсальных станков и автоматов.
2.1.17.3. Приводы подачи в станках с ЧПУ, особенности конструкций. Кинематические схемы компоновки. Особенности конструирования приводов подачи вертикального направления.
2.1.17.4. Характеристики двигателей, используемых в приводах подачи станков с ЧПУ.
2.1.17.5. Механизмы приводов подачи универсальных станков.
Механизмы микроперемещений.
2.1.17.6. Передача ходовой винт-гайка скольжения, зубчато-реечное передача. Основы проектирования.
2.1.17.7. Шариковая винтовая передача «ШВП». Конструкции,
способы регулирования зазоров. Основы отсчёта параметров ШВП.
2.1.17.8. Особенности конструирования ШВП с большим ходом. Опоры ШВП.
2.1.17.9. Зубчатые передачи в приводах станков с ЧПУ.
2.1.17.10. Муфты, беззазорные соединения в приводах подачи станков с ЧПУ. Проектирование и расчёт.
2.1.17.11. Шариковые и червячно-реечные передачи. Основы проектирования.
2.1.17.12. Смазка приводов подачи станков с ЧПУ.
2.1.18. Корпусные детали станков. (2 часа), /Д3/ стр. 319-325.
2.1.18.1. Требования к корпусным деталям. Проектирование корпусных деталей. Особенности проектирования станин. Материалы корпусных деталей. Жёсткость,
13
виброустойчивость корпусных деталей. Основы расчёта.
2.1.19. Делительные механизмы в металлорежущих станках. Конструкции. Основы проектирования и расчёта. Механизмы периодического действия. (1 часа), /03/ стр. 345-357.
2.1.20. Механизмы фиксации металлорежущих станков. (0,5 часа), /03/ стр. 345-357.
2.1.21. Система охлаждения в станках. Отвода стружки.(0,5
часа).
2.1.22. Испытания станков.(1 часа), /03/ стр. 418-424, /Д3/ стр. 376, /02/ стр. 590-631.
2.1.22.1. Испытание станков на точность, жёсткость, виброустойчивость.
2.1.22.2. Приемосдаточные испытания станков и станочные системы. /02/ стр. 590.
2.1.23. Установка станков в производственных помещениях. (1 час), /07/ стр. 253-268.
2.1.23.1. Требования к установке станка.
2.1.23.2. Установка станков нормальной точности, установка позиционных станков.
2.1.23.3. Колебательные процессы в станках. Вибрация станков.
2.1.23.4. Установка станков на фундамент.
2.1.23.5. Виброизолирующие опоры.
2.1.24. Автоматизированные станочные системы на базе станков с ЧПУ. (6 часа), стр. 573-582.
2.1.24.1. Назначение и классификация. Понятие об автоматизированном участке, автоматической линии и
автоматизированном производстве (ГАП), построенных на базе станков с ЧПУ. Классификация участков и линий по технологическому назначению для обработки корпусных деталей. Классификация участков и производства по компоновке; с линейной одно или многорядной компоновкой, с круговой компоновкой; с модульным принципом компоновки.
14
2.1.24.2. Понятие о станочном модуле, как основной ячейке, комплектующей автоматизированные участки и ГАП. Структура модуля токарного станка (робото-технологический комплекс) РТК: робот, станок, транспортёры подачи и отвода деталей, наполнители, тактовые столы, места замеров. Пример робототизированных секций токарных станков со встройкой роботов.
2.1.25. Гибкие производственные системы (ГПС). (2 часа), /02/ стр. 518-587.
2.1.25.1. Структура, функции, взаимосвязи и характеристики ГПС. Классификация ГПС. Элементы ГПС.
Организационная структура ГПС.
2.1.25.2. Транспорт ГПС.
2.1.25.3. Диагностика в станках и станочных системах. /05/ стр. 415-422.
2.1.25.4. Автоматическое технологическое оборудование ГПС и подсистемы. Обеспечение, функционирования ГПС. Автоматизированные транспортно-накопительные системы инструментов. /05/ стр. 284-285.
2.1.26. Автоматические линии. (6 часов), /02/ стр. 553-562.
2.1.26.1. Типы автоматических линий и их классификация. Компоновка автоматических линий.
2.1.26.2. Оптимизация компоновок автоматических линий. Примеры автоматических линий. Линии с жёсткой, гибкой и смешанной связью. Синхронные и не синхронные автоматические линии.
2.1.26.3. Транспортные поворотные устройства для деталей, обрабатываемых на автоматических линиях. Транспортные устройства для деталей, неподвижных и подвижных при их обработке. Транспортные устройства для деталей, вращающихся при обработке. Транспортные устройства для линий с разделяющимся потоком обработки деталей. Поворотные устройства и кантователи на автоматических линиях.
15
2.1.26.4. Автоматические линии с приспособлениями-спутниками. Компоновки.
2.1.26.5. Накопители для приёма, хранения и выдача на автоматических линиях.
2.1.26.6. Автоматический контроль деталей и операции на линиях. Контроль состояния инструмента. Обратить на обязательность введения контроля после операций, где неправильность выполнения грозит аварийной ситуацией на последующей операции. (Сверление глубоких отверстий, перед операцией резьбонарезания в отверстиях и т. п.), /лекция/.
2.1.26.7. Автоматические линии для групповой обработки деталей, переналаживаемые линии. Состав оборудования.
2.1.26.8. Роторные станки и станочные системы.
16
Лабораторные занятия.
2.2. Лабораторные занятия, их наименование и объём в часах.
10ый семестр, 4 часа
2.2.1. Испытания фрезерного станка на жёсткость.(2 часа).
2.2.2. Испытание фрезерного станка на геометрическую точность. (2 часа).
2.3. Практические занятия посвящены подготовке к курсовому проектированию.
2.3.1. Расчёт и проектирование привода главного движения станков с ЧПУ. (2 часа).
2.3.2. Расчёт и проектирование привода подачи станков с ЧПУ. (2 часа).
2.4. Курсовой проект. Проект станка с ЧПУ с подробной разработкой привода главного движения или привода подачи. Пояснительная записка 35-40 листов. Графическая часть 3,5-5 листов формата А1.
2.4.1. Содержание самостоятельной работы студентов, её объём в часах. (см. форму 2).
2.4.2. Основная и дополнительная литература. (см. форму 1).
2.4.3. Перечень наглядных и других пособий, методических материалов к использованию ТСО.
2.4.3.1. Плакаты, общие виды станков, промышленных роботов, станочных систем и их структурно-кинематические схемы.
2.4.3.2. Альбомы конструкций узлов, общие виды, структурно-кинематические схемы станков с ЧПУ и станочных систем.
17
Вопросы для зачета и экзамена по курсу
“Металлорежущие станки 1 часть”
1.Технико-экономические показатели станков.
2.Понятие автомат и полуавтомат,цикл автомата.Проблемы смены инструме-нта и обеспечение качества на автоматах.
3.Конструкция и наладка токарно-револьверного полуавтомата на примере1Г340.
4.Конструкция и наладка токарно-револьверного автомата на примере 1А136.
5.Принцип работы автомата продольного точения,фасонно-отрезные автоматы.
6. Конструкция и наладка горизонтального многошпиндельного полуавтомата на примере 1Б240-6.
7. Конструкция и наладка вертикального многошпиндельного полуавтомата на примере 1К282.
8.Токарно-копировальные станки: назначение,принцип работы.Фрезерно-копировальные станки.
9.Агрегатные станки, назначение,компоновки,основные узлы,их разновидности. Устройство многошпиндельного сверлильного агрегатного станка.
10. Конструкции, компоновки и наладка токарных станков с
ЧПУ.
11. Конструкции токарных обрабатывающих центров. Конструкции узлов полярной координаты.
12. Конструкции и назначение фрезерно-сверлильно-расточных обрабатывающих центров.
13. Конструкции инструментальных магазинов обрабатывающих центров. Кодирование инструментов.
14. Наладка фрезерно-сверлильно-расточных обрабатывающих центров.
15.Обзор конструкций станков с ЧПУ,зубофрезерные,шлифова-
льные, агрегатные.
16.Особенности эксплуатации станков с ЧПУ.
18
17.Автооператоры,манипуляторы с ручным управлением, сбалансированные манипуляторы в машиностроении.
18.Термины и определения в области робототехники.Основные показатели промышленных роботов.Общие характеристики и классификация.
19. Координаты промышленных роботов.Структурные и кинематические схемы основных станочных промышленных роботов.
20.Модульные конструкции промышленных роботов, основные узлы,захватные устройства промышленных роботов.
21.Основы проектирования промышленных роботов.
22.Порядок проектирования и документация МРС.
23.Пути ускорения проектных работ.Роль вычислительной техники.Вопросы патентоспособности и патентной чистоты проектируемых станков.Стандартизация,унификация и агрегати- рование в станкостроении.
24.Основы художественного конструирования в МРС. Эргономические требования.Требования к технике безопаснос-ти,производственной санитарии и экологичности к промышлен-
ному оборудованию.Технологичность деталей и узлов МРС.
25.Модель для оценки работоспособности станка.Процессы, протекающие при работе станка.
26.Начальные показатели качества станка.Точность, прочность, жесткость,сопротивление усталости,динамическая точность.
27.Стойкость станка к действию вредных процессов: колебательные процессы,износостойкость деталей и узлов станка.
28.Анализ приводов главного движения,используемых в МРС. Требования к приводам главного движения.
29.Определение исходных данных для проектирования привода главного движения.
19
30.Компановки приводов главного движения для станков нормальной и высокой точности.
31.Графоаналитический расчет коробок скоростей.Граничные условия.
32.Простые и сложные структуры коробок скоростей. Перебор-
ная группа.
33.Проектирование приводов главного движения с использова-нием многоскоростных электродвигателей.
34.Проектирование приводов главного движения с использова- нием вариаторов.
35.Способы управления переключением скоростей,блокировки.
36.Выбор двигателя.Динамика привода главного движения.
37.Приводы главного движения в станках с ЧПУ. Характеристи-ки,требования к характеристикам приводов главного движения.
Двигатели в приводах главного движения станков с ЧПУ.Их характеристики.
38.Конструкции механизмов автоматической смены инструмен-та в шпинделях станков с ЧПУ.
39.Проектирование приводов главного движения станков с ЧПУ.
Особенности конструкций приводов главного движения станков токарной группы с ЧПУ.
Особенности конструкций приводов главного движения станков с ЧПУ фрезерно-сверлильно-расточной группы.
40.Ременные передачи в приводах главного движения станков с ЧПУ.
20
Вопросы для зачета и экзамена по курсу
“Металлорежущие станки 2 часть ”
1.Требования к шпиндельным узлам,нагрузочная способность, характеристики шпиндельных узлов.
2.Конструкции шпиндельных узлов. Конструкции шпинделей, материалы шпинделей.
3. Шпиндельные узлы на опорах качения. Конструкции опор качения.Роль предварительного натяга.
4.Баланс жесткости шпиндельных узлов.Расчет шпиндельных узлов на жесткость.
5. Расчет шпиндельных узлов на точность.
6. Расчет шпиндельных узлов на виброустойчивость. Особеннос-ти проектирования высокоскоростных шпиндельных узлов.
7.Смазка шпиндельных узлов на опорах качения.
8.Эксплуатация шпиндельных узлов на опорах качения,проверка правильности создания натяга.
9. Защита шпиндельных опор. Смазка шпиндельных узлов на опорах качения
10.Шпиндельные узлы на опорах скольжения. Особенности конструкции и эксплуатации.
11. Шпиндельные узлы на опорах с гидродинамической смазкой, конструкции,основы проектирования и эксплуатации.
12. Шпиндельные узлы на опорах с гидростатической смазкой,конструирование, основы расчета и эксплуатации.
13.Обзор конструкций и область применения шпиндельных узлов на опорах с газовой смазкой и на магнитных опорах.
14.Требования,предъявляемые к направляющим.Устойчивость движения исполнительного механизма по направляющим.
15.Типы направляющих.Материалы в направляющих сколь- жения.Конструкции направляющих.Регулировка зазоров.
16.Смазка направляющих скольжения.Защита от загрязнения.
21
17.Проектирование и расчет направляющих скольжения по допустимым нагрузкам и на жесткость.
18. Направляющие качения, конструкции, область применения,характеристики.Способы регулирования зазора.
19. Проектирование и расчет направляющих качения.
20. Направляющие смешанного трения.
21.Гидростатические направляющие, проектирование,основы расчета,эксплуатация.
22. Обзор конструкций направляющих с гидродинамической, газовой смазкой.Использование гидро- и аэроразгрузки при перемещении узлов станка по направляющим.
23.Типы приводов подачи МРС,их конструктивные разновиднос-ти.Требования к приводам подачи.
24.Проектирование приводов подачи универсальных станков и автоматов.
25.Приводы подачи в станках с ЧПУ,особенности конструк-
ций. Кинематические схемы компоновки. Особенности конструирования приводов подачи вертикального направления.
26.Характеристики двигателей,используемых в приводах подачи станков с ЧПУ.
27.Механизмы приводов подачи универсальных станков. Механизмы микроперемещений.
28.Передача ходовой винт-гайка скольжения,зубчато-реечная передача.Основы проектирования.
29. Шариковая винтовая передача “ШВП”.Конструкции,способы регулирования зазоров.Основы отсчета параметров ШВП.
30. Особенности конструирования ШВП с большим ходом.
Опоры ШВП.
31. Зубчатые передачи в приводах станков с ЧПУ.
32.Муфты,беззазорные соединения в приводах подачи станков с ЧПУ. Проектирование и расчет.
33.Шариковые червячно-реечные передачи. Основы проектиро- вания.
22
34.Смазка приводов подачи станков с ЧПУ.
35.Требования к корпусным деталям. Проектирование корпусных деталей. Особенности проектирования станин. Материалы корпусных деталей. Жесткость, виброустойчивость корпусных деталей. Основы расчета.
36.Делительные механизмы в МРС. Конструкции. Основы проектирования и расчета. Механизмы периодического действия.
37. Механизмы фиксации МРС.
38.Испытание станков на точность, жесткость, виброустойчи-
вость.
39.Приемосдаточные испытания станков и станочные системы. Установка станков в производственных помещениях.
40.Понятие об автоматизированном участке, автоматической линии и автоматизированном производстве(ГАП),построенных на базе станков с ЧПУ. Классификация участков и линий по технологическому назначению для обработки корпусных дета-
лей. Классификация участков и производства по компоновке; с линейной одно или многорядной компоновкой, с круговой компоновкой; с модульным принципом компоновки.
41.Понятие о станочном модуле, как основной ячейке, комплектующей автоматизированные участки и ГАП. Структура модуля токарного станка РТК: робот, станок, транспортеры подачи и отвода деталей, наполнители, тактовые столы, места замеров. Пример робототизированных секций токарных станков со встройкой роботов.
42.Структура,функции,взаимосвязи и характеристики ГПС. Классификация ГПС. Элементы ГПС. Организационная структура ГПС.
43.Транспорт ГПС.
44.Диагностика в станках и станочных системах.
23
45.Типы автоматических линии и их классификация. Компоновка автоматических линий.
46.Оптимизация компоновок автоматических линий. Примеры автоматических линий. Линии с жесткой, гибкой и смешанной связью. Синхронные и несинхронные автоматические линии.
47.Транспортные поворотные устройства для деталей, обрабатываемых на автоматических линиях. Транспортные устройства для деталей, неподвижных и подвижных при их обработке. Транспортные устройства для деталей, вращающихся при обработке. Транспортные устройства для линий с разделяющимся потоком обработки деталей. Поворотные устройства и кантователи на автоматических линиях.
48. Автоматические линии с приспособлениями-спутниками. Компоновки.
49.Накопители для приема, хранения и выдачи на автоматических линиях.
50. Автоматический контроль деталей и операции на линиях. Контроль состояния инструмента. Обратить на обязательность введения контроля после операций, где неправильность выполнения грозит аварийной ситуацией на последующей операции. (сверление глубоких отверстий, перед операцией резьбонарезания в отверстиях и т.п.).
51. Автоматические линии для групповой обработки деталей, переналаживаемые линии. Состав оборудования.
52.Роторные станки и станочные системы.
24
Список литературы по теоретическому курсу
Основная
01. Станочное оборудование автоматизированного производства Т1 / под ред. Бушуева В.В.
02. Станочное оборудование автоматизированного производства Т2 / под ред. Бушуева В.В.
03. Проектирование металлорежущих станков и станочных систем / Проников А.С.и др. издательство МГТУ Т1, 1995 г.
04. Проектирование металлорежущих станков и станочных систем / Проников А.С. и др. издательство МГТУ Т2, 1995 г.
05. Проектирование металлорежущих станков и станочных систем / Проников А.С. и др. издательство МГТУ Т3, 1998 г.
06. Корчегин А.И. «Конструирование и расчет МРС и станочных систем. Курсовое проектирование» / Высшая школа, 1991 г.
07. Проектирование металлорежущих станков и станочных систем / Проников А.С. и др. издательство МГТУ Т2, книга № 1, 1995 г.
Дополнительная
Д1. Проектирование и расчёт приводов подач станков с ЧПУ. Методические указания / Ведерников Ю.А. - Набережные Челны. 1994 г.
Д2. Проектирование и расчёт приводов главного движения станков с ЧПУ часть 1. Учебное пособие / Набережные Челны, 1996 г.
Д3. Металлорежущие станки. Учебник для машиностроительных ВУЗов / под ред. Пуша В.Э. –
М.: Машиностроение. 1985 г.
Д4. Конструкции приводов главного движения токарных обрабатывающих центров / Ведерников Ю.А. Методические указания - Набережные Челны, 2000 г.
Курсовой проект.
Курсовой проект по курсу “Металлорежущие станки” (МРС) состоит из пояснительной записки порядка 25..30 страниц и 3..3,5 листов чертежей формата А1.
Темой курсового проекта может быть «Проект станка с ЧПУ с подробной разработкой привода главного движения или привода подач». Типовые задания приведены в настоящем пособии. Студенту может быть выдано индивидуальное задание с привязкой к оборудованию с ЧПУ, которое есть на предприятии по месту работы студента.
Порядок выполнения курсового проекта.
При получении задания необходимо ознакомиться с конструкциями типовых станков (станки, компоновка и конструкция, которых близко подходят к проектируемому станку). При рассмотрении конструкций типовых станков и их узлов необходимо обратить внимание на класс точности станка и особые условия на проектирование согласно заданию. Выбрав модель станка близкую к проектируемому (в дальнейшем будем называть его базовой моделью), студент берет за основу внешний вид станка, кинематическую схему и конструкцию узла, внося свои изменения согласно заданию на проектирование. [2], [3], [Паспорт станка] и др.
Содержание курсового проекта «Проект станка с подробной разработкой привода главного движения».
В пояснительной записке должны быть отражены вопросы:
1. Описание конструкции и назначение станка.
2. Выбор и обоснование компоновки привода главного движения.
3. Кинематический расчет привода главного движения –
определение диапазона регулирования, подбор двигателя,
27
определение числа передач «Z» коробки скоростей, расчёт коробки скоростей.
4. Обоснование выбора конструкции шпиндельного узла и регулировки зазоров в опорах.
5. Описание системы смазки привода главного движения.
6. Расчеты шпиндельного узла на жесткость, точность и виброустойчивость.
Графическая часть.
1. Внешний вид станка, формат А1.
2. Кинематическая схема, формат А2.
3. Развертка коробки скоростей и шпиндельного узла, формат А1…А5.
4. Свертка коробки скоростей и шпиндельного узла, формат А1.
5. Механизм переключения скоростей, формат А1.
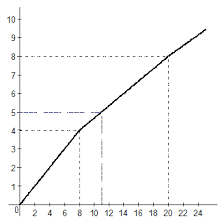
В современных приводах главного движения станков с ЧПУ применяют, как правило, бесступенчатое регулирование скорости вращения шпинделя. В качестве двигателя используют или двигатели постоянного тока или двигатели переменного тока с частотным регулированием [12]. В наше время больше информации в доступной литературе приведено по электрическим приводам постоянного тока, поэтому рекомендуется ограничиться в учебном проекте их применением. Частота вращения двигателя постоянного тока от nmin до nном достигается за
счет изменения магнитного поля обмоток якоря и при изменении магнитного поля статора частота вращения двигателя изменяется от nном до nmax (см. рис.1).
28
Рис.1.
Имеем две зоны регулирования:
I - зона изменения частоты при постоянном крутящем моменте;
II - зона изменения частоты при постоянной мощности на валу двигателя от nном до nmax.
Если обозначим  , а
, а  , то диапазон регулирования скорости двигателя Dдв будет равен:
, то диапазон регулирования скорости двигателя Dдв будет равен:

В справочной литературе, как правило, приводятся значения nном и nmax; nmin в таблицах не приводится. В некоторых случаях по тексту описания двигателя дают рекомендательные значения dM, тогда  . Если таких рекомендаций нет, рекомендуем (только для
. Если таких рекомендаций нет, рекомендуем (только для
выполнения учебного курсового проекта)брать nmin = ⅔ nном.
29
Вообще диапазон регулирования двигателя может быть не двухзонным, а многозонным с расширением зон как dM, так и dN, все это зависит от системы управления двигателем. При
выполнении проекта ограничимся применением электрических приводов с двухзонным регулированием, которые широко приводятся в справочной и учебной литературе. Значение nmin ограничиваем верхним уровнем из-за необходимости устойчивой скорости на шпинделе и жесткой скоростной характеристики (жесткая зависимость заданной скорости с изменением нагрузки). Вообще в этой связи, предпочтительно регулирование скорости шпинделя обеспечить при постоянной мощности. Особенно это важно для станков с мощностью Nст выше 10..15 кВт. Поэтому многие фирмы желая обеспечить высокую жесткость скоростной характеристики электрического привода и сохранить больший диапазон регулирования двигателя обеспечивают регулирование в большем диапазоне при Nconst или завышают мощность используемого двигателя.
Необходимый диапазон регулирования шпинделя станка,  , как правило не удается обеспечить за счет изменения числа оборотов двигателя. Для обеспечения регулирования числа оборотов шпинделя во всем диапазоне, применяют коробку скоростей, ее необходимый диапазон определяется из выражения:
, как правило не удается обеспечить за счет изменения числа оборотов двигателя. Для обеспечения регулирования числа оборотов шпинделя во всем диапазоне, применяют коробку скоростей, ее необходимый диапазон определяется из выражения:
 , а число механических передач Z можно определить по формуле:
, а число механических передач Z можно определить по формуле:

Значение Z всегда округляем в большую сторону. Определение Z по этой формуле дает получение регулировочной характеристики на шпинделе станка с
30
перекрытием без «провалов». При применении коробок скоростей с обычной множительной структурой, передаточные отношения зубчатых передач следует выбирать в пределах: ¼ < i < 2.
Для упрощения при выполнении курсового проекта допускается определять силы резания:  ,
,
где: Nэф – эффективная мощность на шпинделе (кВт);
V – скорость резания (м/мин);
Pz – тангенциальная сила резания (H).
Для токарных станков можно брать значения сил резания Px = Py = (0,7..0,8)Pz.
Для фрезерных станков из соотношений Py / Pz = 0,35, Px / Pz = 0,52 [16].
Строим график скоростей [5], [8] и приступаем к компоновке коробки скоростей. Для токарных станков класса точности П и выше принимаем раздельную компоновку привода [8].
Ориентировочно диаметр шпинделя в пролете для токарных, фрезерных, расточных и многоцелевых станков определим из условия: dmin = Nэф / (0,1..0,3); в задней опоре d2 = dmax ∙(0,8..0,9).
При выполнении курсового проекта полный расчет зубчатой передачи и вала коробки скоростей делается только для самой нагруженной передачи, параметры остальных передач выбираются ориентировочно.
Межопорное расстояние λ (если нет других оснований) можно принять λ = (3..5) ∙ dmin.
Определяем усилия действующие, на шпиндель при черновой обработке заготовки максимального диаметра. Выбрав опоры по характеристике d*n [5] и проверив их на несущую способность, делаем компоновку шпиндельного узла, проверяем его на жесткость, виброустойчивость и точность [8], [9].
31
При конструировании привода главного движения токарных станков необходимо обратить внимание на узел датчика резьбонарезания, который служит для синхронизации углового положения шпинделя и заданной подачи исполнительного механизма.
Содержание курсового проекта «Проект станка с подробной разработкой привода подач».
В пояснительной записке должны быть отражены вопросы:
1. Описание конструкции и назначение станка.
2. Выбор и обоснование компоновки привода подач и конструкции направляющих.
3. Описание системы смазки механизмов привода подач.
4. Расчет направляющих.
5. Расчет шариковой винтовой пары и подбор подшипников.
6. Расчеты по подбору двигателя подач.
Графическая часть.
1. Общий вид станка (в двух проекциях), формат А1
2. Кинематическая схема станка, формат А1..А2.
3. Приводы подач: сечения вдоль винта по координатам соответственно, 2..2,5 чертежа формата А1.
Если задана разработка привода подачи вертикальной координаты, то дополнительно разрабатывается механизм разгрузки шариковой винтовой пары от веса подвижной массы привода.
Проектирование привода подач необходимо начинать с компоновки станка в целом и соответственно приводов подачи [8], [15]. Затем определяемся с выбором направляющих [8], [11] и кинематической схемой привода подачи [16].
32
Для станков с ЧПУ лучше брать стальные накладные направляющие [8]. Ход исполнительных механизмов выбирается из условия обработки максимального габарита заготовки плюс необходимая величина перехода для отвода исполнительного механизма в исходное положение (например, для замены инструмента или выполнения других операций). Габариты и ход стола станков фрезерно-расточной группы выбираются исходя из условия обработки максимальных габаритов обрабатываемой заготовки, пространства необходимого для расположения механизмов крепления заготовки или по базовому варианту.

Рис.2.
Выбрав параметры исполнительных механизмов (суппорта, стола), делаем проверочный расчет направляющих. Вес подвижных частей выбираем ориентировочно: «вес заготовки σ1 = (0,3..0,6) веса призматической детали с размерами L × B × H». Вес подвижных частей исполнительных механизмов берем ориентировочно (0,5..0,7) от веса призматической детали L × B × H, соответственно габаритов стола, суппорта. Составляем расчетную схему и проверяем направляющие на износостойкость [8], [9], [10], [11].
33
Определив из расчетной схемы тяговое усилие Qm делаем расчет параметров шариково-винтовой пары (ШВП) [8], [15]. Подбираем подшипники опор. Определяемся с механизмом смазки направляющих, ШВП и передач, если они есть. Делаем компоновку привода. Затем делаем расчеты по подбору параметров двигателя [8]. Подбираем двигатель [8], [16] или [13].
34
Литература для выполнения курсового проекта.
1. Справочник технолога машиностроителя. Т.2 / под ред. А.Г. Косиловой и Р.К. Мещерякова – 4-е изд. перераб. и доп. – М.: Машиностроение,1986 г.
2. Роботизированные технологические комплексы и гибкие производственные системы в машиностроении. Альбом схем и чертежей / под ред. Ю.М. Солнцева. – М.: Машиностроение, 1989 г.
3. Станочное оборудование автоматизированного производства. Т.1 / под ред. В.В. Бушуева – М.: Издательство «Станки», 1993 г.
4. Станочное оборудование автоматизированного производства. Т.2 / под ред. В.В. Бушуева – М.: Издательство «Станки», 1993 г.
5. Бушуев В.В. Основы конструирования станков. - М.: Издательство «Станки», 1992 г.
6. Проектирование металлорежущих станков и станочных систем. Справочник. Т.1 / под ред. А.С. Проникова. – М.: Машиностроение, 1995 г.
7. Проектирование металлорежущих станков и станочных систем. Справочник. Т.2 / под ред. А.С. Проникова. – М.: Машиностроение, 1995 г.
8. Пуш В.Э. Металлорежущие станки. – М.: Машиностроение, 1986 г.
9. Кочергин А.И. Конструирование и расчет металлорежущих станков и станочных комплексов. Курсовое проектирование. – Минск. «Высшая школа», 1991 г.
10. Ведерников Ю.А. Проектирование и расчет приводов главного движения станков с ЧПУ. Часть 1 / КамПИ - Набережные Челны, 1996 г.
35
11. Ведерников Ю.А., Хусаинов Р.М. Направляющие металлорежущих станков. Методические указания для самостоятельной работы / КамПИ - Набережные Челны, 1996 г.
12. Сафронович А.А. Карусельные станки. – М.: Машиностроение, 1983 г.
13. Справочник по электрическим машинам / под ред. Копылова И.П. – М.: Энергоиздат., 1988 г. Том 1.
14. Справочник по электрическим машинам / под ред. Копылова И.П. – М.: Энергоиздат, 1988 г. Том 2.
15. Станки с числовым программным управлением / под ред. Лещенко В.А. – М.: Машиностроение, 1988 г.
16. Ведерников Ю.А. Конструирование и расчет приводов подач станков с ЧПУ. Методические указания / КамПИ - Набережные Челны, 1996 г.
36
Типовое задание
К курсовому проекту
I
Проект токарного станка с ЧПУ
| N п/п | Компоновка станка Разраб. узел | Класс точности и  , кВт , кВт | Максимал. параметры обрабат. заготовки Ø L, мм  | Диапазон регулиров. оборотов шпинделя  | Пределы подач X,Z мм/об | Скорость Ускоренного хода мм/мин | Особые условия |
| 1а | С горизонтальной станиной и подробной разработкой привода главного движения | Н 4 | Ø=100 L=100 |  | X: 0,025..0,5Z: 0,05..1 | X=1800 Z=3000 | шпидель на опорах |
| 1б | -//----//---//---//-- | B 4 | ---//---//--- | ---//---//--- | ---//---//--- | ---//---//---//--- | ---//---//--- |
| 1в | с подробной разработкой привода подач | В 4 | ---//---//--- | ---//---//--- | ---//---//--- | ---//---//--- | направляющие скольжения |
| 2а | Для патронно-центровых работ с наклонной станиной с подробной разраб. привода главного движения | Н 4 | Ø=100 L=800 |  | ---//---//--- | X=1800 Z=3000 | шпидель на опорах качения |
| 2б | -//----//---//---//-- | В 4 | ---//---//--- | ---//---//--- | ---//---//--- | ---//---//--- | ---//---//--- |
| 2в | С подробной разработкой привода подач | В 4 | ---//---//--- | ---//---//--- | ---//---//--- | ---//---//--- | направляющие скольжения |
| 3а | Для патронных работ, с подробной разработкой привода главного движения | Н 5 | Ø=200 L=200 |  | ---//---//--- | ---//---//--- | шпидель на опорах качения |
| 3б | -//----//---//---//-- | В 5 | ---//---//--- |  | ---//---//--- | ---//---//--- | ---//---//--- |
| 3в | с горизонтальной компоновкой, с подробной разработкой привода подач | Н 5 | ---//---//--- | ---//---//--- | ---//---//--- | ---//---//--- | направляющие скольжения |
| 3г | с наклонной компоновкой, с подробной разработкой привода подач | Н 5 | ---//---//--- | ---//---//--- | ---//---//--- | ---//---//--- | направляющие скольжения |
II