 2018-02-14
2018-02-14 489
489Под механической характеристикой аппарата понимают зависимость суммарной силы сопротивления, противодействующее перемещению подвижной части системы(якоря) от хода якоря. Складывается из противодействующих сил, отключающих и контактных пружин, веса подвижной части, сил трения в подшипниках и шарнирах между подвижными деталями аппаратов, при этом противодействующие силы веса всегда направлены в одну сторону, независимо от перемещения якоря. Силы трения меняют своё направление в зависимости от направления движения.
Тяговая статическая характеристика электромагнита. Она представляет собой зависимость электромагнитной силы от положения якоря или рабочего зазора для различных постоянных значений напряжения, подведенного к обмотке, или тока в обмотке:
Fэ = f (δ) при U= const
или Fэ = f (δ)при I= const.
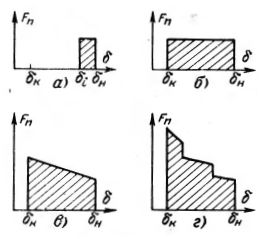
Рис. 1. Характерные виды нагрузок электромагнита: а- механизма защелки, б - при подъеме груза, в - в виде пружины, г - в виде ряда вступающих действия пружин, δн - начальный зазор, δк - конечный зазор.
2. Характеристика противодействующих усилий (нагрузка) электромагнита. Она представляет собой зависимость противодействующих сил (в общем случае приведенных к точке приложения электромагнитной силы) от рабочего зазора δ (рис. 1): Fп = f (δ)
Сопоставление противодействующей и тяговой характеристик дает возможность сделать заключение (предварительное, без учета динамики) о работоспособности электромагнита.
Для того чтобы электромагнит нормально сработал, необходимо, чтобы тяговая характеристика во всем диапазоне изменений хода якоря проходила выше противодействующей, а для четкого отпускания, наоборот, тяговая характеристика должна проходить ниже противодействующей (рис. 2).

Рис. 2. К согласованию характеристик действующих и противодействующих сил
3. Нагрузочная характеристика электромагнита. Эта характеристика связывает значение электромагнитной силы и величину напряжения, подведенного к обмотке, или тока в ней при фиксированном положении якоря:
Fэ = f (u) и Fэ = f (i) при δ= const
4. Условная полезная работа электромагнита. Она определяется как произведение электромагнитной силы, соответствующей начальному рабочему зазору, на величину хода якоря:
Wпу = Fн (δн - δк) при I= const.
Значение условной полезной работы для данного электромагнита является функцией начального положения якоря и величины тока в обмотке электромагнита. На рис. 3 приведены статическая тяговая характеристика Fэ = f (δ) и кривая Wпу = Fн (δ) электромагнита. Заштрихованная площадь пропорциональна Wпу при данном значении δн.

Рис. 3. Условная полезная работа электромагнита.
5. Механическая эффективность электромагнита — относительная величина условной полезной работы Wпу по сравнению с максимально возможной (соответствующей наибольшей заштрихованной площади) Wп.y м:
ηмех= Wпу / Wп.y м
При расчете электромагнита желательно так выбирать его начальный зазор, чтобы электромагнит отдавал максимум полезной работы, т. е. чтобы δн соответствовал Wп.y м (рис. 3).
6. Время срабатывания электромагнита — время с момента подачи сигнала на обмотку электромагнита до перехода якоря в его конечное положение. При прочих равных условиях оно является функцией начальной противодействующей силы Fп:
tср = f (Fп) при U = const








