 2020-01-15
2020-01-15 164
164
Определим требования, предъявляемые контуру наведения и стабилизации (позиционного контура):
1. максимум частоты среза разомкнутого позиционного контура;
2. запас по фазе разомкнутого контура 300¸600;
3. условие вхождения ЛАЧХ разомкнутого позиционного контура в разрешенные зоны.
Прежде чем начать формирование позиционного контура необходимо построить запретные зоны, в которые должна входить логарифмическая амплитудная частотная характеристика разомкнутого позиционного контура.
Для этого определим положение контрольной точки. Из соотношений (4.4) и (4.5) получим:
 (11.1)
(11.1)
где wКТ – контрольная частота, wКТ = 0,78 с-1;
ТКТ = 1/wКТ (11.2)
где ТКТ – постоянная времени контрольной точки, ТКТ=1,282 с;
 (11.3)
(11.3)
где АДОП – коэффициент разомкнутой системы на контрольной
точке, АКТ = 1,538 рад.
Передаточная функция запретной зоны определяется передаточной функцией следующего вида:
 , (11.4)
, (11.4)
где d– величина ошибки слежения, мрад;
ККТ = АКТ/d - коэффициент.
Определим ККТ для нескольких ошибок слежения:
- ошибка d = 0,5 мрад
ККТ0.5 = 3077;
- ошибка d = 1 мрад
ККТ1 = 1538;
- ошибка d = 4 мрад
ККТ4 = 384,615.
Запретные зоны будут определяться ЛАЧХ от передаточной функций запретных зон:
LЗЗd(w)= 20×lg(|WЗЗd(р)|) (11.5)
Графики запретных зон представлены на рисунке 11.1.
Для того чтобы ЛАЧХ позиционного контура вошла в необходимую зону необходимо в контур ввести фильтр.
Управляющий сигнал в позиционном контуре обрабатывается ЦВУ. Частота опроса (дискретизации) ЦВУ fd = 100 Гц. ЦВУ представляет собой звено дискретизации, которое при расчетах мы заменим на звено чистого запаздывания. Величина запаздывания, которое ЦВУ вносит в систему определяется следующим выражением:
 , t = 3,183×10-3 c.
, t = 3,183×10-3 c.
Структурная схема позиционного контура представлена на рисунке 11.2.
Запретные зоны
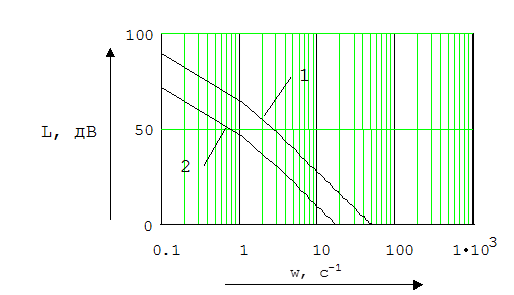
1 – ЛАЧХ запретной зоны ошибки 0,5 мрад, LЗЗ0.5, дВ;
2 - ЛАЧХ запретной зоны ошибки 4 мрад, LЗЗ4, дВ.
Рисунок 11.1.
Параметры фильтра выбираем исходя из тех же соображе-ний, которые были описаны выше (максимум частоты среза позиционного контура, запас по фазе разомкнутого контура 300¸600) и дополнительно добавляется условие вхождения в разрешенные зоны (см. рисунок 11.1.).
Структурная схема позиционного контура
 |
Рисунок 11.2.
Выберем частоту среза позиционного контура wСРПОЗ= 35 c-1 (fCPПОЗ= wСР/2×p, fCPПОЗ= 5,57 Гц).
Передаточная функция фильтра позиционного контура будет иметь следующий вид:
 , (11.6)
, (11.6)
где КПОЗ = 559,760, ТФ = 0,07 с, ТКТ = 1,282 с.
Т.о. передаточная функция разомкнутого позиционного контура примет вид:
WРПОЗ(w)= е-р×t×WФПОЗ(w)×WЗСК(w) (11.7)
Построим логарифмические амплитудную и фазовую частотные характеристики разомкнутого позиционного контура по следующим формулам (соответственно):
LРПОЗ(w)= 20×lg(|WРПОЗ(р)|) (11.8)
jРПОЗ(w)= arg(WРПОЗ(р)) (11.9)
Логарифмические амплитудная и фазовая частотные характеристики разомкнутого позиционного контура представлены на рисунке 11.3.
Запас устойчивости системы по фазе на частоте среза равен:
DjСК = 1800 + jРПОЗ(wСРПОЗ)= 54,3070 (см. рисунок 11.3.).
Запас устойчивости по амплитуде позиционного контура:
DLCK= -LРАЗСК(w-180)= 12 дВ,
где w-180- частота, при которой jРПОЗ= -1800,
что вполне допустимо.
Коэффициент разомкнутого позиционного контура равен:
 , (11.10)
, (11.10)
КРПОЗ = 344,137.
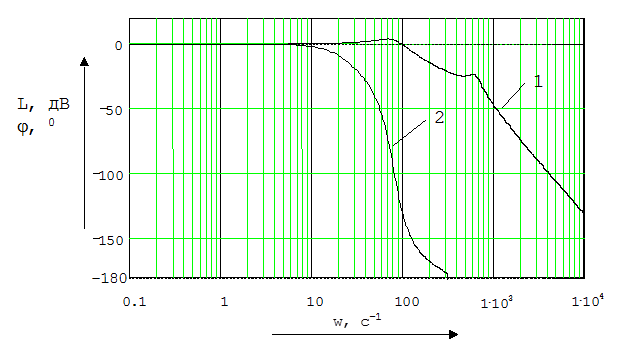
Логарифмические амплитудная и фазовая частотные характеристики разомкнутого позиционного контура
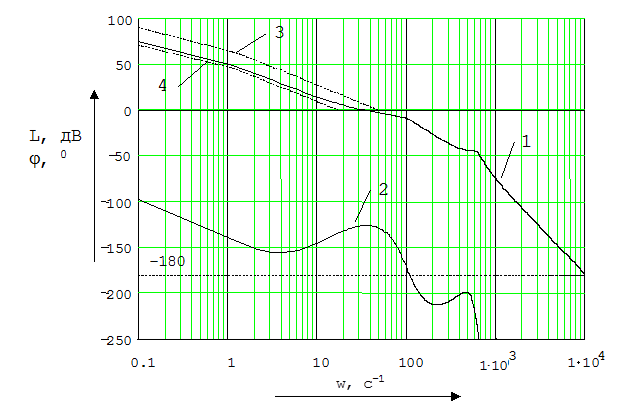
1 – ЛАЧХ разомкнутого позиционного контура LРПОЗ, дВ;
2 - ЛФЧХ разомкнутого позиционного контура jРПОЗ, 0;
3 – ЛАЧХ запретной зоны ошибки 0,5 мрад, LЗЗ0.5, дВ;
4 - ЛАЧХ запретной зоны ошибки 4 мрад, LЗЗ4, дВ.
Рисунок 11.3.
Передаточная функция позиционного контура следящего привода (замкнутой системы) определяется следующим выражением:
 (11.11)
(11.11)
Построим логарифмические амплитудную и фазовую частотные характеристики замкнутого позиционного контура по следующим формулам (соответственно):
LЗПОЗ(w)= 20×lg(|WЗПОЗ(р)|) (11.12)
jЗПОЗ(w)= arg(WЗПОЗ(р)) (11.12)
Логарифмические амплитудная и фазовая частотные характеристики замкнутого позиционного контура представлены на рисунке 11.4.
Логарифмические амплитудная и фазовая частотные характеристики замкнутого позиционного контура
1 – ЛАЧХ замкнутого позиционного контура LЗПОЗ, дВ;
2 - ЛФЧХ замкнутого позиционного контура jЗПОЗ, 0.
Рисунок 11.4.
Как видно из полученных результатов ЛАЧХ разомкнутого позиционного контура соответствует предъявленным выше требованиям к характеристикам позиционного контура. Но ЛАЧХ разомкнутого позиционного контура входит в зону соответствующую ошибке 4 мрад, что является не приемлемым для систем данного класса точности. Чтобы обеспечить ошибку слежения меньшую или равную 1 мрад, достаточную дли систем сопровождения, введем в систему компенсирующую положительную обратную связь. Т.о. структурная схема проектируемой следящей системы примет следующий вид (см. рисунок 11.5.).
Следуя рекомендациям в литературе [3] эквивалентная передаточная функция скомпенсированного замкнутого позиционного привода будет иметь следующий вид:
 (11.13)
(11.13)
 |
Структурная схема скомпенсированного позиционного контура
Рисунок 11.5.
Параметры компенсирующей связи выбираем из соображений требований к характеристикам позиционного контура. Т.о. ККС = 800.
Построим ЛАЧХ и ЛФЧХ скомпенсированного замкнутого позиционного контура:
LЗСС(w)= 20×lg(|WЗСС(р)|) (11.14)
где LЗСС(w)- ЛАЧХ скомпенсированного позиционного контура.
jЗСС(w)= arg(WЗСС(р)) (11.15)
где jЗСС(w)- ЛФЧХ скомпенсированного позиционного контура.
ЛАЧХ и ЛФЧХ скомпенсированного замкнутого позиционного контура представлены на рисунке 11.6.
Выразим передаточную функцию разомкнутого скомпенсированного позиционного контура из передаточной функции замкнутого контура. Получим следующее выражение:
 (11.16)
(11.16)
Логарифмические амплитудная и фазовая частотные характеристики скомпенсированного замкнутого позиционного контура
1 – ЛАЧХ скомпенсированного замкнутого позиционного контура привода ГН LЗСС, дВ;
2 - ЛФЧХ скомпенсированного замкнутого позиционного контура привода ГН jЗСС, 0.
Рисунок 11.6.
Построим ЛАЧХ и ЛФЧХ скомпенсированного разомкнутого позиционного контура:
LРСС(w)= 20×lg(|WРСС(р)|) (11.17)
где LРСС(w)- ЛАЧХ скомпенсированного позиционного контура.
jРСС(w)= arg(WРСС(р)) (11.18)
где jРСС(w)- ЛФЧХ скомпенсированного позиционного контура.
ЛАЧХ и ЛФЧХ скомпенсированного разомкнутого скомпенсированного позиционного контура на рисунке 11.7.
Запас устойчивости системы по фазе на частоте среза равен:
DjСC = 1800 + jРСС(wСРПОЗ)= 34,5670 (см. рисунок 11.7.).
Запас устойчивости по амплитуде позиционного контура:
DLCC= -LРСС(w-180)= 24 дВ,
где w-180- частота, при которой jРСС= -1800,
что вполне допустимо.
Коэффициент разомкнутого позиционного контура равен:
 , (11.19)
, (11.19)
КРСС = 1336.
И так, благодаря введению в структуру привода компенсирующей связи, мы добились того, что ЛАЧХ разомкнутого позиционного контура (разомкнутой следящей системы) входит в зону соответствующую ошибке менее 1 мрад, что является приемлемым для систем данного класса точности. Кроме того, частота среза следящей системы увеличилась до wСР= 69,3 с-1 (fСР= 11,03 Гц), т.е. увеличилась полоса пропускания системы. На этом проектирование структуры привода горизонтального канала наведения и стабилизации ОЭС закончено.
Окончательный вид структурной схемы математической модели привода ГН и его функциональная схема представлены в приложениях 2 и 3 соответственно. Параметры структурной схемы математической модели привода ГКНиС представлены ниже:
КСК = 28,468 Т1 = 0,3 с RC = 1,425 Ом
КДВ = 4,21 Т2 = 1 с ТЭЛ = 0,01 с
КПОЗ = 344,14 Т3 = 0,2 с ТМ = 1,745 с
ККС = 800 ТФ = 0,07 с СЕ = 13,6 Вс
ТК = 1,6 мс ТКТ = 1,282 с СМ = 6 Вс
xК = 0,125 t = 3,18 мс
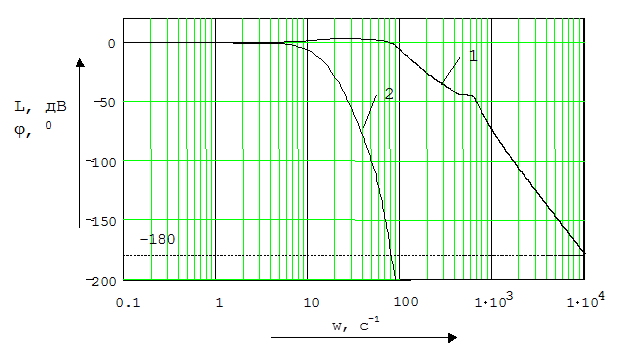
Логарифмические амплитудная и фазовая частотные характеристики скомпенсированного разомкнутого позиционного контура
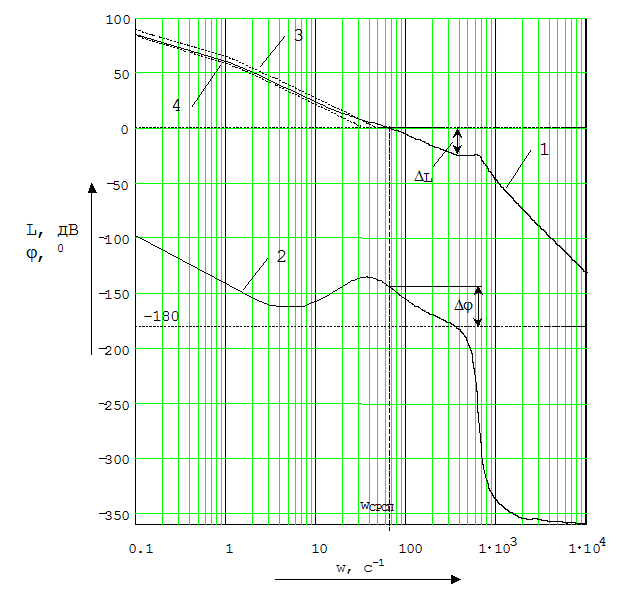
1 – ЛАЧХ скомпенсированного разомкнутого позиционного контура привода ГН LРСС, дВ;
2 - ЛФЧХ скомпенсированного разомкнутого позиционного контура привода ГН jРСС, 0;
3 – ЛАЧХ запретной зоны ошибки 0,5 мрад, LЗЗ0.5, дВ;
4 - ЛАЧХ запретной зоны ошибки 1 мрад, LЗЗ1, дВ.
Рисунок 11.7.








