 2020-01-15
2020-01-15 212
212Для синтеза АСР с заданными показателями качества работы необходимо построить переходные процессы параметров настройки и принять в качестве оптимальных, то есть, при которых выполняются условия в исходных данных для расчёта.
Структурная схема моделирования системы с цифровым ПИД‑регулятором приведена на рисунке (см. рис.5.9).

Рис. 5.9. Структурная схема моделируемой ЦАСР
Объект по каналу регулирования имеет передаточную функцию, по каналу возмущения передаточная функция имеет вид (смотри исходные данные).
 (25)
(25)
ПИД‑регулятор в соответствии с его передаточной функцией представлен в виде трёх параллельно соединенных операторов. Для решения системы дифференциальных уравнений используется метод Рунге‑Кутта второго порядка [18]. Графики переходных процессов, наглядно иллюстрируют влияние на качество регулирования величины такта квантования и дифференцирующей составляющей K3 в ПИД‑законе регулирования регулятора.
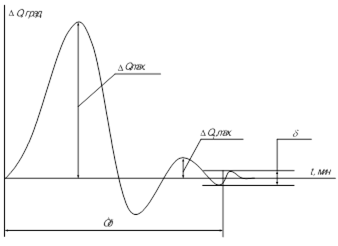
Рис.5.10. Общий вид переходной характеристики

Рис. 5.11. Переходный процесс при времени квантования Ткw=const=0,4 и меняющемся К3 и изменении задания регулятору (U=1)

Рис. 5.12. Переходный процесс при времени квантования Ткw =const=0,4 и меняющемся К3 и изменении внешнего воздействия (FW=1)

Рис. 5.13. Переходный процесс при К3 =const = 0 и меняющемся времени квантования и изменении задания регулятору (U= 1)

Рис. 5.14. Переходный процесс при К3= const=0 и меняющемся времени квантования и изменении внешнего воздействия (FW=1)
Таблица 5- Сводные данные по расчету
| Период квантования, Tкw | Настройки регулятора
| Воздействия
| ||||||||||
| U=l | FW=1 | FR=10 | ||||||||||
| K1 | K2 | K3 | DQ max | ψ | Tp | DQ max | ψ | Tp | DQ max | ψ | Tp | |
| 0,3
| 0,599 | 0,116 | 0 | 1,39 | 0,839 | 27,42 | 0,348 | 0,908 | 39,96 | 5,636 | 0,863 | 35,97 |
| 0,775 | 0,137 | 1 | 1,44 | 0,85 | 26,6 | 0,3132 | 0,897 | 37,96 | 5,31 | 0,84 | 33,98 | |
| 0,835 | 0,148 | 1,5 | 1,47 | 0,828 | 25,91 | 0,301 | 0,885 | 36,97 | 5,17 | 0,8296 | 33,77 | |
| 0,4
| 0,578 | 0,152 | 0 | 1,3 | 0,89 | 27,53 | 0,355 | 0,91 | 38,1 | 5,7365 | 0,8987 | 31,99 |
| 0,691 | 0,17 | 0,5 | 1,32 | 0,908 | 26,97 | 0,326 | 0,903 | 37,96 | 5,49 | 0,9001 | 29,77 | |
| 0,776 | 0,189 | 1 | 1,35 | 0,918 | 25,9 | 0,3162 | 0,899 | 33,57 | 5,289 | 0,909 | 28,17 | |
| 0,75 | 0,523 | 0,27 | 0 | 1,39 | 0,841 | 40,162 | 0,3567 | 0,909 | 42,96 | 5,823 | 0,866 | 36,97 |
| 0,579 | 0,297 | 0,23 | 1,42 | 0,845 | 45,956 | 0,341 | 0,9049 | 41,96 | 5,686 | 0,851 | 36,76 | |
| 0,667 | 0,326 | 0,45 | 1,44 | 0,848 | 46,156 | 0,323 | 0,894 | 39,96 | 5,514 | 0,837 | 36,21 | |
Из анализа результатов, приведённых в таблице (Таблица 5), можно сделать следующие выводы:
1) Увеличение времени такта квантования до величины Тkw=0,4не ухудшает качественных показателей процесса регулирования. Динамическая ошибка ΔΘmax и время регулирования Трувеличиваются незначительно. Увеличение Тkwэквивалентно увеличению транспортного запаздывания в системе, отрицательно влияющего на устойчивость и качество работы АСР.
Поэтому дальнейшее увеличение времени Тkwприводит к ухудшению показателей качества регулирования.
2) Введение дифференцирующей составляющей в закон регулирования регулятора (настройка К3) наиболее эффективно при небольших значениях Тkw. Увеличение времени Тkwснижает влияние параметра К3 на динамическую точность и быстродействие работы АСР.
3) Согласно данным (Таблица 5 – Сводные данные по расчету), требуемые в задании показатели качества работы ЦАСР могут быть обеспечены при настройках ПИД-регулятора.
За оптимальные принимаем те, которые обеспечивают заданное качество регулирования при времени такта квантования Тkw=0,4.
Следовательно, в качестве оптимальных выбираем следующие значения настроечных параметров: К1=0,776; К2 =0,189; К3=1; Тkw=0,4.
При этом динамическая ошибка регулирования ΔΘmax:
1. по каналу управления 1,350С;
2. по каналу возмущения 0,3169 0С;
3. по каналу регулирующего органа 5,289 0С.
Время регулирования Тр:
1. по каналу возмущения 25,9 мин;
2. по каналу возмущения 33,57
3. по каналу регулирующего органа 28,173 мин.
Степень затухания переходных процессов:
1. по каналу управления y=0,918;
2. по каналу регулирующего органа y=0,909;
3. по каналу возмущения 0,899.
Рассчитываемая АСР удовлетворяет требуемым показателем качества работы: динамическая ошибка и время регулирования не превышают заданных (допустимых) значений. Статическая ошибка регулирования при исследовании ПИД-регулятора равна нулю.








