 2020-01-14
2020-01-14 190
190
Рассчитаем номинальный ток нагревателя одного канала. Силовая цепь изображена на рис.10.
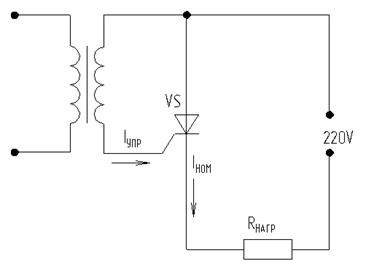
Рис.10. Силовая цепь
Uсети = 220 В ± 10 %;
f = 50 Гц;
Pн = 2 кВт;
 =>
=> 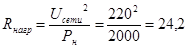 Ом;
Ом;
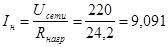 А.
А.
При максимальном напряжении сети 242 В ток в цепи будет равен:
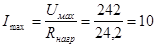 А.
А.
Мощность в нагрузке можно регулировать двумя наиболее популярными способами:
1) Фазовое управление. При фазовом управлении тиристор отпирается импульсом управления и подключает напряжение питающей сети к нагрузке на определенную (регулируемую) часть периода, что позволяет экономично регулировать среднее значение мощности, подводимой к нагрузке. Регулировка мощности осуществляется путем изменения фазового угла φ, при котором происходит отпирание ключа – тиристора. В момент замыкания или размыкания ключа при фазовом регулировании из-за резкого изменения тока возникают перенапряжения и, как следствие, радиопомехи, коммутационные помехи и т.п. Это основной недостаток фазового регулирования.
2) Синхронная коммутация. При синхронной коммутации или коммутации при нулевом напряжении ключ отпирает и запирает цепь в момент, когда напряжение питающей сети проходит через нуль. При этом мощность в нагрузке регулируется путем изменения отношения длительности замкнутого состояния ключа (тиристор открыт), когда к нагрузке прикладывается целое число периодов питающей сети, к длительности его разомкнутого состояния (тиристор закрыт). Коммутационные помехи в этом случае резко уменьшаются.
Как для проектирования электрического аппарата с высокой степенью точности измерения и регулировки температуры, выбираем фазовое управление мощностью на нагрузке.
Регулировку будет осуществлять непосредственно микропроцессор. Микропроцессор постоянно делает тактовые отсчеты и в любой из этих отсчетов микропроцессор может подать управляющий импульс. Но микропроцессору нужна какая-то начальная точка отсчета. Этой начальной точкой для МП будет датчик нуля напряжения (ДНН) показанный на рис.11.
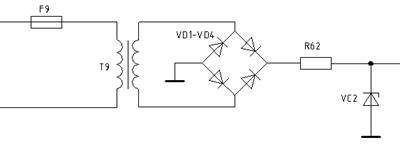
Рис.11. Схема датчика нуля напряжения
Схема ДНН состоит из понижающего трансформатора напряжения с коэффициентом трансформации к=10, диодного моста VD1-VD4, резистора R62 и стабилитрона VC2. На вход трансформатора подается сетевое напряжение, на выходе оно стает равным
 В.
В.
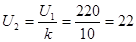
На выходе мостового выпрямителя получается однонаправленное пульсирующее напряжение. Стабилитрон служит для ограничения выходного напряжения до напряжения стабилизации. Таким образом, на выходе ДНН получается пульсирующее напряжение, ограниченное сверху, задевающее область нуля. Выход ДНН подключается к порту микропроцессора p1.7, откуда микропроцессор получает сигнал о переходе сетевого напряжения через нуль. И в зависимости от программы управления подает цифровой импульс на схему управления с определенной задержкой времени через цифровые выходы. Схема управления представляет собой транзисторный каскад с общим коллектором (эмиттерный повторитель) (рис.12.). При подаче на базу транзистора логической «1», его выходное напряжение повторяет входное с вычетом сопротивления p-n перехода транзистора. Т. е. входное напряжение трансформатора, служащего как гальваническая развязка, равно 5-0,7=4,3 В. У трансформатора Т1 коэффициент трансформации к=1.
Рис.12. Схема управления тиристорным ключом
Напряжения 4,3 В достаточно для открывания тиристора VS1. Транзистор VT1 питается от источника питания +5 В.
Рассчитаем сопротивление на ДНН. Выберем стабилитрон марки КС147А.
Характеристики стабилитрона КС147А:
Рабочий ток  = 20 мА;
= 20 мА;
Напряжение стабилизации  = 4,7 В.
= 4,7 В.
Сопротивление  находим по формуле:
находим по формуле:
 Ом;
Ом;
Мощность рассеивания резистора  :
:
 Вт
Вт
Достаточно выбрать резистор мощностью 0,5 Вт.








