2020-01-14
2020-01-14 308
308
Несмотря на общую высокую эффективность применения активной шумовой помехи (АШП), существенный недостаток при использовании состоит в том, что их легко обнаружить. Это ставит в уязвимое положение ПАП, а также позволяет применить различные меры борьбы с помехами:
- работа РЛС в короткий промежуток времени;
- смена несущих частот (если РЛС многочастотная);
- использование сложных сигналов;
- использование длительного когерентного накопления.
Но все эти вышеуказанные методы либо приводят к неудобству работы РЛС, либо к изначальному проектированию РЛС с возможностью таких режимов работы. Одним из перспективнейших методов борьбы с АШП является адаптивных антенных решёток.
Оптимальную обработку сигналов в решётках можно рассматривать как задачу оптимальной фильтрации, основной целью которой является улучшение приёма или обнаружения полезного сигнала, когда наряду с ним присутствуют помехи. При этом полезный сигнал может иметь один или несколько неопределённых параметров (таких как пространственное положение его источника, энергия и начальная фаза сигнала), которые необходимо оценить.
Поскольку любая многоэлементная антенная решётка может использоваться для осуществления пространственной фильтрации или, что то же самое угловой селекции, то первоначальный подход к решению проблемы сводился к получению требуемых ДН с нулями в направлении источников помех с помощью весового суммирования сигналов отдельных элементов решётки.
При более общем подходе к проблеме обнаружения сигнала на форму ДН не накладывается каких-либо ограничений. Структура процессора для обработки сигналов решётки обусловлена выбранным критерием оптимальности и получается в результате математического решения рассматриваемой задачи. При это операция формирования ДН становится частью алгоритма оптимальной обработки сигналов, хотя такая операция и не была задана в самом начале. Полученное устройство обработки (процессор) будет настолько близко к оптимальному, насколько используемые математические модели соответствуют действительным условиям работы системы.
При использовании большинства известных критериев эффективности оптимальные решения (оптимальные весовые векторы) тесно связаны между собой. Наиболее известным оптимальным решением для линейной антенной решётки с числом элементов n является n-мерный вектор комплексных весовых коэффициентов:

Где R – комплексная корреляционная матрица помех, размерности n*n, S – n-мерный вектор ожидаемого сигнала. Отсчёты смеси сигнала и помехи, соответствующие каждому элементу антенной решётки, в формуле взяты в некоторый момент времени  .
.
Практическая реализация алгоритма связана с решением проблемы априорной неопределённости, которая заключается в отсутствии информации о корреляционной матрице помех R. Одним из методов решения данной проблемы является адаптация, представляющая собой процедуру настройки параметров антенной решётки на основе данных, последовательно извлекаемых из принимаемой смеси сигнала и помех. Важным этапом является выбор алгоритма адаптации, поскольку он непосредственно влияет как на скорость переходного процесса (сходимости), так и на сложность технической реализации системы в целом.
Среди всего многообразия адаптивных алгоритмов наиболее распространёнными являются два класса:
- алгоритмы, основанные на вычислении коэффициентов весового вектора антенной решётки путём непосредственного обращения заранее оцениваемой корреляционной матрицы (метод НОМ);
- градиентные адаптивные алгоритмы, приводящие к устройствам обработки с корреляционными обратными связями (КОС).
Первый класс алгоритмов теоретически обеспечивает самую высокую скорость переходных процессов адаптации, однако требует больших вычислительных затрат при больших размерностях корреляционной матрицы.
Второй класс, несмотря на сравнительную простоту и высокую эффективность в установившемся режиме, имеет ряд недостатков, главным из которых является длительный переходной процесс адаптации, особенно в случае сильно коррелированных помех. Кроме того, системам КОС присуща нестабильность при изменении мощности помехи, а также при наличии мощного сигнала от цели.
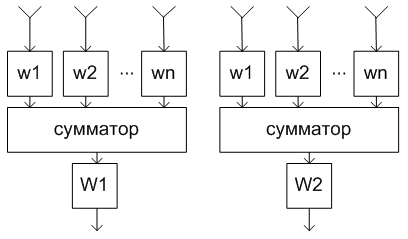
На практике в целях упрощения аппаратурной реализации переходят к частичной адаптации, когда весовой коэффициент  определяется не для каждого элемента фазированной антенной решётки (ФАР), а для двух или нескольких подрешёток, на которые разбивается ФАР. При этом адаптация осуществляется не путём подстройки фазовращателей ФАР, а на видеочастоте в процессоре сигналов. Так в простейшем случае при разбиении линейной ФАР надве подрешётки получается два пространственных канала (Рис.27). При этом техническая реализация адаптивного алгоритма первого класса не представляет больших сложностей.
определяется не для каждого элемента фазированной антенной решётки (ФАР), а для двух или нескольких подрешёток, на которые разбивается ФАР. При этом адаптация осуществляется не путём подстройки фазовращателей ФАР, а на видеочастоте в процессоре сигналов. Так в простейшем случае при разбиении линейной ФАР надве подрешётки получается два пространственных канала (Рис.27). При этом техническая реализация адаптивного алгоритма первого класса не представляет больших сложностей.
Алгоритм НОМ представляет собой выражение  , в котором матрица R заменяется её оценкой максимального правдоподобия (ОМП). Вектор S обеспечивает согласованный приём (накопление) сигнала. Поскольку параметры сигнала (направление прихода) априори неизвестны, стандартный подход к решению задачи накопления сводится к перебору всевозможных значений, это реализуется электрическим сканированием луча ФАР. Электрическое сканирование реализовано непосредственно фазовращателями ФАР
, в котором матрица R заменяется её оценкой максимального правдоподобия (ОМП). Вектор S обеспечивает согласованный приём (накопление) сигнала. Поскольку параметры сигнала (направление прихода) априори неизвестны, стандартный подход к решению задачи накопления сводится к перебору всевозможных значений, это реализуется электрическим сканированием луча ФАР. Электрическое сканирование реализовано непосредственно фазовращателями ФАР  , которые обеспечивают синфазность отсчётов сигнала в обоих каналах, поэтому в формуле принимаем вектор комплексных амплитуд сигнала S={1,..1}
, которые обеспечивают синфазность отсчётов сигнала в обоих каналах, поэтому в формуле принимаем вектор комплексных амплитуд сигнала S={1,..1}  (случай полностью известного сигнала). При этом оптимальная обработка сигнала на фоне АШП по заданному алгоритму сводится к вычитанию из отсчётов 1-го канала Y1 отсчётов 2-го Y2, умноженных на оценку комплексного коэффициента корреляции R, и наоборот, из отсчётов 2-го канала – отсчётов 1-го (компенсация помехи) и последующего сложения результатов вычитания (накопление сигнала). Оптимальный весовой вектор будет иметь вид
(случай полностью известного сигнала). При этом оптимальная обработка сигнала на фоне АШП по заданному алгоритму сводится к вычитанию из отсчётов 1-го канала Y1 отсчётов 2-го Y2, умноженных на оценку комплексного коэффициента корреляции R, и наоборот, из отсчётов 2-го канала – отсчётов 1-го (компенсация помехи) и последующего сложения результатов вычитания (накопление сигнала). Оптимальный весовой вектор будет иметь вид  , где * - знак комплексного сопряжения. Устройство, осуществляющее вычитание Z=Y1-Y2R комплексных отсчётов, называется компенсатором помехи. Алгоритм ОМП комплексного коэффициента корреляции R имеет вид:
, где * - знак комплексного сопряжения. Устройство, осуществляющее вычитание Z=Y1-Y2R комплексных отсчётов, называется компенсатором помехи. Алгоритм ОМП комплексного коэффициента корреляции R имеет вид:
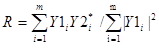
Где Y1,2 – отсчёты на выходе соответственно 1-го и 2-го пространственных каналов, m – число усреднений. Алгоритм ОМП предусматривает усреднение по совокупности независимых отсчётов помехи. Для случая импульсного сигнала с большой скважностью, когда отражённый сигнал находится в одном элементе разрешения по дальности, для усреднения используют отсчёты разных элементов разрешения по дальности. При большом количестве усредняемых отсчётов влиянием одного отсчёта полезного сигнала (сигнал находится в одном элементе разрешения) на оценку коэффициента корреляции помехи можно пренебречь.
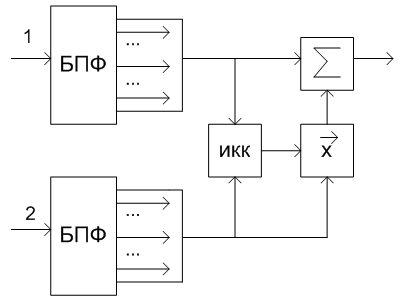
Структурная схема компенсатора АШП для пары пространственных каналов приведена на Рис.28. Кроме блоков БПФ и вычитающего сумматора на схеме показаны измеритель коэффициента корреляции (ИКК) и комплексный перемножитель ( ).
).