 2020-01-14
2020-01-14 234
234
Как уже отмечалось ранее, расчет будем вести в программной среде «Стрела». Запустив исполнительный файл программы, выберем закладку «Исследование», а затем «Расчет параметров РЛС - классический метод»
В появившемся окне «Параметры системы» требуется указать параметры РЛС согласно техническому заданию:
· в закладке «РЛС» рис.5, укажем в качестве «Основного режима работы» - импульсно-доплеровский. Такой выбор связан с тем, что импульсно-доплеровские БРЛС по сравнению с импульсными станциями с режимом СДЦ обладают существенно лучшими характеристиками по обнаружению цели на встречных курсах на фоне земли. «По назначению» - бортовая РЛС. «Скорость носителя РЛС в м/с» - 3000 км/час (соответствует скорости МИГ-31 на высоте 17500 м) или ≈ 833 м/с. «Однозначно измеряемая скорость м/с» -830 м/с (соответствует ТЗ). «Тип обработки» - режекция и когерентное накопление.
· в закладке «Сигнал» рис.6, укажем в качестве «Типа сигнала» - простой. «Длина волны, см» - 3, такой выбор связан с тем, что близко с этим значением (3,3 см) расположено окно прозрачности, следовательно, меньше затухание в среде.
· в закладке «Цель и помеха» рис.7 укажем «ЭПР цели кв.м» - 3,6 (в соответствии с ТЗ). «Максимальна скорость цели, м/с» - 830 м/с (в соответствии с ТЗ), но т.к. скорости F-15 С на высоте 14000 м ≈ 736 м/с ее и возьмем за исходную. «ЭПР помехи» - 825 м2 (расчет и рассуждения см. ниже). «Ширина спектра флюктуаций, Гц» - 10934.
Для ввода ЭПР помехи требуется ее рассчитать, что и сделаем ниже. Существует множество способов учета отражений от подстилающей поверхности. Для решение таких задач в режиме квазинепрерывного импульса (КНИ) посредством выбора частот повторения зондирующих импульсов выделяется для частотного спектра отраженного сигнала подвижной цели поддиапазон доплеровских частот, свободный от отражений подстилающей поверхности. Фактически создаются условия обнаружения цели на фоне собственных шумов приемника БРЛС.
Импульсно-доплеровские РЛС, как известно, используют метод станций, работающих на непрерывном излучении. Спектр доплеровского сигнала, отраженного от поверхности земли с летящего объекта, представлен на рис. 8 На нем значению мощности сигнала S(Fд) в области доплеровской частоты Fд = 0 соответствуют высотные отражения от точек подстилающей поверхности вблизи нормали, которая проведена с самолета на землю. Области частот Fдгл соответствуют отражению по оси луча антенны РЛС, скользящего по поверхности земли со скоростью перемещения самолета в горизонтальной плоскости.

Как видно на рис.8, при скоростях сближения с целью, больших скорости самолета, отсутствуют сигналы, отраженные от земли, поэтому при атаке сверху вниз в переднюю полусферу цели отсутствует загрубление чувствительности приемника и дальность обнаружения цели РЛС оказывается такой же, как и в свободном пространстве. При атаке в заднюю полусферу цели, имеет место загрубление чувствительности приемника за счет сигналов, принимаемых по боковым лепесткам диаграммы направленности антенны. При этом, чем ниже высота полета самолета, тем больше загрубление приемника и, следовательно, меньше дальность обнаружения цели.
Поскольку для РЛС самолета не представляется возможным реализовать метод непрерывного излучения, так как невозможно разместить две антенны в носовой части самолета, был предложен импульсно-доплеровский метод с высокой частотой повторения (ВЧП) излучения зондирующих импульсов. Этот метод заключается в том, что при атаке в переднюю полусферу цели выбирается частота повторения импульсов Fп большая, чем максимальная доплеровская частота цели. Периодически излучаемые зондирующие когерентные импульсы можно рассматривать как сумму гармонических составляющих с частотами fk = f0 + kFп, где f0 - несущая частота РЛС, a k - любое целое число. Каждая составляющая с частотой fk подобна непрерывному зондирующему сигналу; максимальное и минимальное доплеровское приращение частоты сигналов, отраженных от подстилающей поверхности, образуется как 2Vc/Ak и -2Vc/Аk соответственно, где Аk = = c/fk, а с - скорость распространения радиоволн. При этом, значение мощности доплеровского сигнала отражения от земли по каждой составляющей модулирируется в соответствии с огибающей спектра зондирующих импульсов Sт. В результате этого спектр отраженного от земли доплеровского сигнала имеет вид, показанный на рис. 9.

При атаке с задней полусферы цели применяется метод средней частоты повторения (СЧП) излучения зондирующих импульсов. При этом анализируются доплеровские частоты ниже "пика земли" (Fдгл). Получается неоднозначное измерение дальности до цели и скорости сближения с ней. Весь интервал однозначной дальности для выбранного периода повторения зондирующих импульсов разбивается на равные интервалы Dp, соответствующие разрешающей способности РЛС по дальности, и в каждом из них производится частотный анализ в диапазоне доплеровских частот цели. Иллюстрацией разбиения временной оси для "нарезки" интервала однозначного определения дальности до цели является рис. 10.

Если исключить определенное количество участков по дальности, соответствующих высоте полета самолета, при которой загрубление приемника не обеспечивает необходимую дальность обнаружения цели, то при снижении самолета дальность, на которой осуществляется прием отражений от земли, не будет уменьшаться, как и дальность обнаружения цели. При изменении частоты повторения зондирующих импульсов обеспечивается обнаружение цели на участках дальности, где были "заперты" приемники РЛС. Отсутствие в режиме КНИ средней частоты повторения импульсов в доплеровском диапазоне частот зон, свободных от отражений подстилающей поверхности, осложняет процесс обнаружения цели. Он становится зависимым от типа подстилающей поверхности. Причем, в силу наличия селекции по дальности и скорости, режиму КНИ СЧП свойственно собирать фон подстилающей поверхности от отдельных ее участков, которые, естественно, по-разному отражают зондирующие сигналы БРЛС.
Для малых по сравнению с длиной волны и пологих неровностей применим метод возмущений (мелкомасштабная модель). Отраженная волна представляется в виде суммы волн от гладкой поверхности, определяемой коэффициентами отражения Френеля и обусловленной мелкими неровностями. Если радиус кривизны неровностей много больше длины волны для плавных неровностей достаточно больших размеров, применим метод Кирхгофа (крупномасштабная модель). При этом отраженное поле вычисляется по законам геометрической оптики, т.е. так же, как при отражении от бесконечной касательной плоскости в данной точке поверхности. С учетом того, что в этой модели затенение одних участков поверхности другими отсутствует, можно воспользоваться коэффициентами отражения Френеля.
При оценке участка гладкой поверхности, эффективно участвующего в формировании отраженного сигнала в сторону РЛС, можно воспользоваться зонами Френеля. Рассмотрим случай вертикального облучения земной поверхности. Метод построения зон ясен из рис. 11.

Для первой зоны разность хода лучей до центра зоны и до любой точки внутри зоны не превышает λ/4, что после отражения на границе зоны соответствует разности хода λ/2, т. е. фазовому сдвигу 180°. Остальные зоны строятся аналогично. Отсюда следует, что первая зона является кругом с радиусом:

так как обычно H >> λ/4, где H – высота БРЛС над землей.
Что касается остальных зон, то они образуют кольца. Вторая зона имеет внутренний радиус R1 и внешний:

последующие радиусы равны:


и т. д. Так как площадь k -го кольца:

т. е. площади колец зон равны. Вследствие того, что сигналы, отраженные от этих зон, имеют разные знаки, происходит их взаимная частичная компенсация и результирующий отраженный сигнал соответствует приблизительно половине формируемого первой зоной Френеля, что и определяет главную роль этой зоны.
Произведем расчет ЭПР помехи от подстилающей поверхности на разных высотах носителя БРЛС, результаты сведем в таблицу 1.
Таблица 1.
| H, м | 20 600 | 17 500 | 15 000 | 10 000 | 5 000 | 1 000 |
| Sk, м2 | 970.752 | 824.668 | 706.858 | 471.239 | 235.619 | 47.124 |
По результатам построим зависимость Sk=f(H) рис.12.

При расчете мощности и спектра отражений от поверхности земли можно использовать геометрические представления. Совместим начало координат с носителем РЛС, которая работает в импульсном режиме, и аппроксимируем диаграмму направленности антенны в виде главного лепестка и сплошной сферы боковых лепестков.
Тогда поверхность земли, точки которой являются источником отражений, формирующих сигнал пассивной помехи на входе приемника в каждый момент времени, представляет собой кольцо, ширина которого пропорциональна длительности зондирующего импульса τи, а радиус определяется текущей задержкой отраженного импульса в пределах однозначной дальности.
В режиме низкой частоты повторения (НЧП) образуется одно кольцо, которое последовательно перемещается в пределах от минимума до максимума однозначной дальности, что показано на рис. 13.

В тех же пределах в режиме высокой частоты повторения (ВЧП) и средней частоты повторения (СЧП) одновременно на поверхности земли образуется система колец, расстояние между которыми пропорционально периоду повторения Т (рис. 14).

Рис. 14 соответствует одному рассматриваемому моменту времени. Пунктиром показаны помехи по главному лепестку диаграммы направленности. Отраженный сигнал от земной поверхности в режиме ВЧП и СЧП приходит в приемник с нескольких колец дальности одновременно. Число таких колец определяется следующим образом:

Где D0 – однозначная дальность, ΔD т – дальность, соответствующая периоду повторения Т.
Учитывая в согласованном фильтре многоканальную обработку по частоте, отраженный сигнал с колец дальности рассортируем по доплеровской частоте.
Нанесем на кольца дальности (рис. 14) линии равных доплеровских частот, называемых изодопами. Изодопы имеют вид гипербол и определяются скоростью носителя РЛС. Ширина изодопы соответствует полосе пропускания доплеровского фильтра Δf.
В результате построения на земной поверхности образуются участки, суммарная площадь которых определяет мощность отражений от земной поверхности в одном фильтре обработки. На рис. 14 для одной изодопы эти участки заштрихованы.
Суммарная площадь участков определяется числом колец дальности, которые пропорциональны периоду повторения Т. В режиме СЧП число колец дальности получается меньше по сравнению с ВЧП, на основании чего площадь отражений от земной поверхности уменьшается.
Приведем методику расчета мощности помех, соответствующих отражениям от земли. Считаем известными путевую скорость полета носителя V, высоту полета Н, ширину доплеровского фильтра Δf, период повторения РЛС Т, максимальную однозначную дальность D0, длину волны λ и длительность зондирующего импульса τи. Линия полета носителя совпадает с осью х, по которой располагается координата дальности, что показано на рис. 15
помехозащита импульсный помеха сигнал
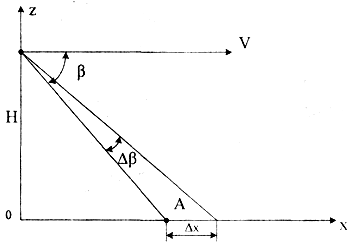
Для любого угла места β частота Доплера:

Определим угол Δβ, соответствующий полосе пропускания доплеровского фильтра ДГ и пропорциональный ширине линии изодопы:

Построим изодопу для выбранного угла β в пространстве, в координатах х,у,z (рис.16).
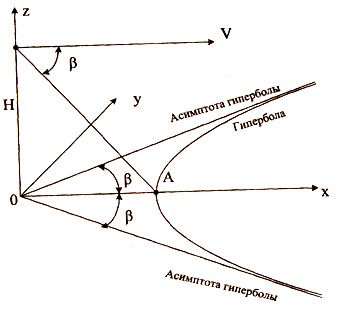
Расчеты показывают, что для гиперболы, построенной из точки А (рис. 15) в плоскости х,у, лежащей на земной поверхности, углы асимптот всегда равны углу β. На рис. 17 приведенная ранее изодопа представлена в плоскости х,у.

Величина Δх (рис. 15) определяет ширину линии изодопы на земной поверхности, пропорциональной величине Δf.
Если по ширине изодопы провести асимптоты, то угол между ними составит величину Δβ, такую же как на рис. 15. Следовательно, ширина изодопы при ее продолжении увеличивается пропорционально величине Δβ. Тогда площадь участка ΔS, определяемого пересечением изодопы и кольца дальности ΔS=ab, где a ─ сторона, определяемая наклонной дальностью D и величиной Δβ и b ─ сторона, которая пропорциональна длительности τи. На основании изложенного площадь одного участка, соответствующая первому кольцу дальности ΔS, определяется:

· в закладке «Параметры 1» рис.18 укажем «Мощность передатчика, кВт» - 5, «Коэффициент усиления антенны» - 10000, «Энергетическая дальность, км» - 123, «Разрешение по дальности, м» - 200, «Вероятность правильного обнаружения» - 0,95, «Вероятность ложной тревоги» - 10-6, «Потери при обработке, дБ» - 3.
· в закладке «Параметры 2» рис. 19 укажем для азимутальной плоскости: «Максимальный угол сканирования, гр.» - 70, «Минимальный угол сканирования, гр.» - (-70), «Разрешение, гр» - 5; для угломестной плоскости: «Максимальный угол сканирования, гр.» - 20, «Минимальный угол сканирования, гр.» - (-20), «Разрешение, гр» - 5; «Время обзора сектора сканирования» - 1,28 с. Расчет числа импульсов в пачке зондирующего сигнала вести, исходя из времени обзора сектора сканирования.
Значения, указанные в закладках «Параметры 1» и «Параметры 2» были выбраны согласно ТЗ и характеристикам БРЛС "БАРС" см. приложение. Теперь программа выполнит расчет параметров РЛС, согласно принятым параметрам, рис. 20.
В программной среде «Стрела» имеется возможность отображения некоторых результатов в виде зависимостей, которые представлены на рис. 21.

Как видно из рис. 21:
· увеличение числа импульсов в пачке приводит к большему значению энергетической дальности, что можно объяснить непосредственной связью числа импульсов в пачке N с коэффициентом передачи сигнала kс (kс = N), а последнее связано с энергетической дальностью R, причем чем больше kс, тем больше R [5].
· увеличение N приводит к повышению вероятности правильного обнаружения D, что вполне удовлетворяет теории [5].
· дальность связана с мощностью передатчика основным уравнением дальности радиолокации (как корень четвертой степени), согласно которому увеличение мощности приводит к возрастанию энергетической дальности.
· увеличение энергетической дальности приводит к уменьшению значения правильного обнаружения, связанно данное явление может быть с тем, что на больших дальностях хуже разрешение целей, больше сказывается влияние среды на распространяющуюся волну и многие другие факторы.
Как ранее отмечалось, требуется обеспечить защиту БРЛС от пассивных помех в виде подстилающей поверхности.








