 2020-01-14
2020-01-14 200
2005.1 Общие сведения о координаторах с непрерывным излучением
У координаторов с непрерывным излучением принцип определения дальности и скорости совершенно отличается от координаторов с импульсным излучением, тогда как угловые координаты измеряются аналогично.
Если в координаторах с импульсным излучением для измерения угловых координат используется амплитудная модуляция сигнала, а информация о дальности заложена во времени задержки отраженного сигнала, то в координаторах с непрерывным излучением (НИ), для возможности измерения дальности, излучаемый сигнал модулируется по частоте или фазе. А измерение дальности при неподвижной цели сводится к измерению частотного интервала Fr между отраженным и излучаемым сигналом, который пропорционален времени запаздывания отраженного сигнала относительно излученного.
Таким образом в координаторах с НИ для измерения дальности используют частотную модуляцию (ЧМ) излучаемого сигнала, а для измерения скорости используют эффект Доплера.
Особенностью таких координаторов является, то что излучение сигнала и прием осуществляется на разнесенные антенны (Рис.31). При этом, излучаемый генератором ВЧ, сигнал fизл модулируется частотным модулятором (ЧМ) с частотой FМ. Изменение частоты FМ осуществляется по пилообразному или синусному закону. Такое преобразование называется простым.
Девиация частоты осуществляется в пределах ΔF при средней частоте излучаемого сигнала fо.
Отраженный сигнал принимается приемной антенной и подается на смеситель, где осуществляется простое преобразование принятого сигнала. В качестве опорного сигнала на смеситель подается fизл. Таким образом на выходе смесителя появляется частота биений F∑ = fизл – fотр . Полученный сигнал F∑ в дальнейшем обрабатывается для получения информации о дальности, скорости и угловых координат цели.

Рис.31
5.2 Преобразование сигнала одиночной цели
В зависимости от скорости цели вид принимаемого сигнала меняется.
5.2.1 Цель не подвижная
В этом случае имеем VЦ =0, F д =0. Для измерения дальности до цели нужно измерять частоту биений.
Если дальность до цели равна 0, то fизл = fотр и F∑ =0. При увеличении дальности будет расти и F∑. И если дальность не меняется, то Fr = const и Fr= F∑ частото-дальномерный сдвиг.
Определим каким образом зависит F∑ от FМ(ТМ) и ΔF (Рис. 32).
Из треугольников ABC и abc выведем соотношение сторон:
 =
=  ,
,  ; (5.1)
; (5.1)
если ac=tц, а BC= ΔF и АС=  , при условии, что период модуляции ТМ значительно превышает дальность до цели (время задержки tц), значение частоты биений Fr может быть принято равным дальномерному сдвигу F∑ = Fr.
, при условии, что период модуляции ТМ значительно превышает дальность до цели (время задержки tц), значение частоты биений Fr может быть принято равным дальномерному сдвигу F∑ = Fr.
F∑ =  = Fr , (5.2)
= Fr , (5.2)
ΔF =  (5.3)
(5.3)

Рис. 32
Таким образом, при неподвижной цели, частота отраженного сигнала на восходящей и нисходящей ветви одинакова. Если частота модуляции постоянна, девиация частоты ΔF, то частота биений является непосредственной мерой расстояния до цели.
Из (5.2) можно записать:
rц =  (5.4)
(5.4)
При отношении:
 = const=A (5.5)
= const=A (5.5)
rц =А Fr (5.6)
Форма напряжения на смесителе (Рис. 32) представляет собой непрерывные колебания частоты биений. При этом нулевые значения будут наблюдаться через  . Поэтому при разложении в спектр данного напряжения он будет содержать только с частотами кратными частоте колебаний. Фара частот биения через
. Поэтому при разложении в спектр данного напряжения он будет содержать только с частотами кратными частоте колебаний. Фара частот биения через  меняется на 180º. Из этого следует:
меняется на 180º. Из этого следует:
1) наименьшая частота, которая может быть выделена и измерена при простейшем преобразовании сигнала равна частоте модуляции Fм
2) частота биений может служить точной мерой расстояния лишь в том случае, когда она кратна частоте модуляции Fм.
Из (5.2) имеем:
 =
=  , (5.
, (5.
При этом левая часть (5.7) представляет собой целое число.
Во всех остальных случаях измеритель будет показывать частоту кратную частоте модуляции Fм и она будет либо больше либо меньше частоты биений.
Таким образом при простейшем методе преобразования сигнала, имеется дискретность отсчета результата, а следовательно имеется постоянная ошибка измерения дальности, которая равна минимальной дальности и соответствует одному биению
rmin =  (5.8)
(5.8)
5.2.2. Цель движется с малой скоростью.
В этом случае отраженный сигнал помимо дальномерного сдвига имеет приращение доплеровской частоты:
F д = fизл  (5.9)
(5.9)
Учитывая, что f0-средняя часто та излучения, значительно превышающая девиацию частоты – ΔF, то можно записать
F д = f0  (5.10)
(5.10)
Тогда частота биений для восходящей и нисходящей ветвей принятого сигнала (Рис.33) будет отличаться от восходящей и нисходящей ветвей излучаемого сигнала и может быть записана как:
F∑В = Fr - F д (5.11)
F∑Н = Fr + F д (5.12)
Среднее значение, постоянной составляющей биений, будет равно дальномерному приращению частоты:
F∑СР =  = Fr ≡ rц (5.13)
= Fr ≡ rц (5.13)
Переменная составляющая частоты биений будет иметь вид:
F∑~=  = F д ≡ VЦ (5.13)
= F д ≡ VЦ (5.13)

Рис. 33
5.2.2 Цель движется с большой скоростью
При значительной скорости цели, когда F д > Fr и Тм>> tц имеем значение частоты на восходящей и нисходящей ветви следующего вида(Рис. 34):
F∑В = F д - Fr (5.14)
F∑Н = F д + Fr (5.15)
При этом постоянная составляющая:
F∑СР = = F д ≡ VЦ (5.16)
А переменная:
F∑~= = Fr ≡ rц (5.17)
Таким образом, для определения однозначного значения дальности и скорости цели в случае простейшего преобразования заранее необходимо знать, что больше F д или Fr. В противном случае определение данных параметров цели может оказаться проблематичным при переходе через граничные значения, то есть F д = Fr. Такое значение скорости называется критичной скоростью и ее наличие является большим недостатком в работе радиотехнических координаторов с непрерывным излучением.
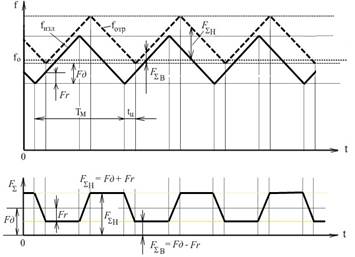
Рис. 34
5.3. Радиотехнические координаторы с квазинепрерывным излучением (КНИ)
Как уже отмечалось, РТК с непрерывным излучением, имеют высокую степень защиты от пассивных помех, что позволяет использовать данный режим работы при обнаружении и сопровождении низколетящих целей, на фоне земли и в сложных метеоусловиях. В тоже время использование такого режима работы требует одновременной работы передающей и приемной системы, что в условиях ограничения размеров и использования одной и той же антенны на прием и передачу делает практически невозможным посторенние таких координаторов. Данное противоречие можно разрешить при использовании квазинепрерывного излучения (КНИ). Координаторы использующие режим квазинепрерывного излучения еще называют когерентными системами с малой скважностью. Данные системы обладают теми же преимуществами, что и координаторы с непрерывным излучением. В тоже время излучение и прием отраженных сигналов в РТК с КНИ разнесены во времени.
При непрерывном излучении спектр излучаемого сигнала (Рис. 35 а), б)) не отличается от спектра отраженного, при условии, что цель неподвижна.

Рис. 35
Если цель движется, то спектральная составляющая сместиться на величину ±F д, в зависимости от того приближается цель или удаляется. Таким образом имеет смысл иметь полосу пропускания приемника в пределах от f0 + F д min доf0 + F дmax, при приближении цели и от f0 - F д min доf0 - F дmax при удалении, тем самым перекрыть весь максимально возможный диапазон скоростей (Рис. 35 в)).
В режиме КНИ спектр излучаемого сигнала отличается прежде всего наличием, кроме центральной спектрально составляющей, но и наличием боковых (Рис. 35 е)), расположенных на равных промежутках в соответствии с частотой повторения импульсов F i.
Отраженный сигнал от не подвижной цели будет иметь аналогичный спектр (Рис. 35 д)). При движущейся цели, спектр сигнала сместится на величину F д в соответствии со скоростью цели (Рис. 35 е)). При этом достаточно иметь информацию об одной из спектральных составляющих. В виду того, что спектр такого сигнала линейчатый и спектральные составляющие расположены через одинаковые частотные промежутки, то для приемника КНИ, для перекрытия всего диапазона скоростей, достаточно иметь полосу пропускания значительно уже, чем у приемника с непрерывным излучением и соизмеримую с частотным промежутком между спектральными составляющими.
Таким образом, системы КНИ это такие системы, у которых облучение цели осуществляется когерентными импульсными сигналами малой скважности.
Отраженный от цели сигнал принимается так же в виде импульсов, а извлечение информации осуществляется таким же образом как и при непрерывном излучении, то есть путем анализа одной составляющей спектра принятого когерентно-импульсного сигнала малой скважности. Но система КНИ обладает рядом технических недостатков, решение которых приводит к усложнению приемника КНИ. Так при скорости цели, когда F д превышает полосу пропускания приемника Fпр (Fпр≈F i), в полосу приемника попадает одна из боковых составляющих спектра отраженного сигнала (Рис. 36). Такой случай называется неоднозначной скоростью. И если F д кратна F i, то в этом случае такая скорость называется «слепой» скоростью.

Рис.36
В виду того, что период следования импульсов в режиме КНИ значительно меньше реальной дальности до цели (Дц > Tп) (Рис.37), то и отраженные импульсы будут поступать с тем же периодом Tп и с одинаковой задержкой tц. В этом случае возможно определение неоднозначной дальности. В случае, если дальность цели Дц кратна периоду повторения Tп, то такая дальность называется «слепой».
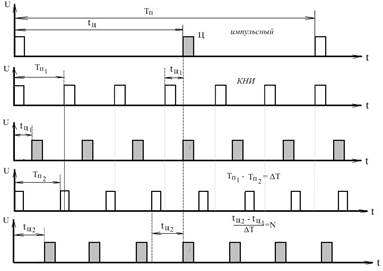
Рис. 37
В обоих случаях устранение неоднозначной скорости и неоднозначной дальности решается за счет изменения длительности периода (частоты следования) зондирующих импульсов.
Заключение
Таким образом, существующие методы пеленгации, измерения угловых координат, дальности, скорости цели позволяют использовать преимущества существующих радиотехнических координаторов для решения поставленных задач. Наиболее практичным считается использование для построения радиотехнических систем поиска и сопровождения целей нескольких, объединенных единой функциональной задачей, наиболее удачно реализованных схем радиотехнических координаторов. Наиболее полно данная проблема решена в многофункциональных РЛС.
Такое решение позволяет, путем переключения, а зачастую и в результате параллельной работы, использовать преимущества того или иного метода обнаружения и сопровождения целей в зависимости от складывающейся обстановки.
История развития средств радиолокации представляет собой комплекс мероприятий направленный, прежде всего, на повышение вероятности обнаружения, точности и дальности сопровождения, помехозащищенности, удобства управления и ряда других показателей, влияющих на качество и характер технических, маневренных и боевых характеристик. Причем изменение идет сразу по нескольким параметрам сразу, что позволяет сделать новый шаг позволяющий подняться на новый уровень.
Существующая борьба между средствами обнаружения и системами защиты стимулирует принятие не стандартных решений.
В последнее время появилась тенденция в получении возможности управления и получения технической информации от различных РЛС, разного «парка», времени выпуска, на единый центр управления.
Список литературы
1. Физические основы получения информации: учебное пособие/ И.Г. Перминов. – Пермь: Изд-во Перм. Гос. Техн. Ун-та, 2006.
2. Основы построения радиотехнических систем управления: Учебное пособие/ А.К. Востриков, С.М. Долотов, В.Г. Красюк, А.У. Митин Киев 1981г.
3. Радиотехнические системы / под ред. Ю. М. Казаринова. Учебник для вузов. М., Изд-во «Советское радио», 1968, стр. 496.
4. Антенны и устройства СВЧ: Учебник для вузов / Под ред. Д.И. Воскресенского. М: Изд-во МАИ, 1999.
5. Радиоэлектронные системы: Основы построения и теория / Под ред. Я. Д. Ширмана [Издательство «Радиотехника»]
6. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития / В.С.Верба [Издательство «Радиотехника»]
7. Электродинамика и техника СВЧ. / А.Д. Григорьев М.: Высш. шк., 1990.
8. http://ru-patent.info/20/40-44/2042101.html «СЛЕДЯЩИЙ КООРДИНАТОР ЦЕЛИ» Григорьев Владимир Григорьевич; Григорьев Дмитрий Владимирович








