2020-04-20
2020-04-20 234
234Содержание
1. Типовое задание
1.1 Задание по варианту
2. Выполнение
2.1 Анализ поставленной задачи
2.2 Блок-схема 1
2.3 Описание алгоритма реализации программы 1
2.4 Программа 1 на языке Ассемблера
2.5 Блок-схема 2
2.6 Описание алгоритма реализации программы 2
2.7 Программа 2 на языке Ассемблера
2.9 Блок-схема 3
2.10. Описание алгоритма реализации программы 3
2.11. Программа 3 на языке Ассемблера
2.8 Карта памяти микропроцессорной системы
2.9 Анализ временных характеристик
2.9.1 Расчет времени выполнения программы 1
2.9.2 Расчет времени выполнения программы 2
2.9.3 Расчет времени выполнения программы 3
3. Вывод
4. Список литературы
Типовое задание
1. Выполнить анализ поставленной задачи, согласно варианту задания. Определить методы ее решения.
. Разработать общий алгоритм реализации задания и провести анализ временных и точностных параметров предлагаемого решения задачи.
. Выполнить инициализацию переменных в общем алгоритме архитектурным элементам микропроцессора КР580ВМ80А и портам ввода-вывода. Составить карту памяти микропроцессорной системы для реализации программы.
. С учетом архитектурных особенностей микропроцессора КР580ВМ80А и заданных методов адресации доступа к операндам разработать подробные алгоритмы реализации задачи.
. На языке Ассемблера микропроцессора КР580ВМ80А разработать программы реализации задачи.
. Выполнить анализ соответствия временных и точностных характеристик разработанного устройства заданным.
. Вывод.
Задание по варианту
Программным способом реализовать фрагмент контактной схемы.
Текущие состояния реле  поступают в порт ввода №1 непрерывно во времени в виде байта информации:
поступают в порт ввода №1 непрерывно во времени в виде байта информации:
| X7 | X6 | X5 | X4 | X3 | X2 | X1 | X0 |
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
Номер бита соответствует номеру реле.
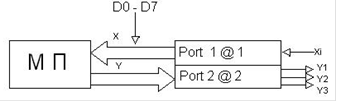
Рисунок 1. Функциональная схема устройства
Состояние бита  соответствует разомкнутому состоянию реле
соответствует разомкнутому состоянию реле  , т.е. напряжение на зажимах 1-2 катушки реле отсутствует. Такому состоянию реле соответствует разомкнутое состояние (
, т.е. напряжение на зажимах 1-2 катушки реле отсутствует. Такому состоянию реле соответствует разомкнутое состояние ( ) нормальноразомкнутого контакта 3-4 и замкнутое состояние (
) нормальноразомкнутого контакта 3-4 и замкнутое состояние ( ) нормальнозамкнутого контакта 5-6. При подаче напряжения на обмотку катушки реле (контакты 1-2) (
) нормальнозамкнутого контакта 5-6. При подаче напряжения на обмотку катушки реле (контакты 1-2) ( ) состояние его контактов меняется на противоположное: нормальноразомкнутый контакт 3-4 замыкается (его состояние становится равным
) состояние его контактов меняется на противоположное: нормальноразомкнутый контакт 3-4 замыкается (его состояние становится равным  ), а нормальнозамкнутый контакт 5-6 размыкается (его состояние становится равным
), а нормальнозамкнутый контакт 5-6 размыкается (его состояние становится равным  ).
).
Рисунок 2. Разомкнутое (а) и замкнутое (б) состояние реле
Согласно логического состояния цепей управления (контактов ) в разрабатываемом устройстве необходимо управлять состоянием реле  . Управляющее слово состоянием реле выводится микропроцессором в порт вывода №2 в виде байта информации, где номер бита также соответствует номеру реле
. Управляющее слово состоянием реле выводится микропроцессором в порт вывода №2 в виде байта информации, где номер бита также соответствует номеру реле  . Если в соответствии с текущим состоянием реле реле в данный момент должно быть замкнуто, то выводится логическая "1".
. Если в соответствии с текущим состоянием реле реле в данный момент должно быть замкнуто, то выводится логическая "1".
Логический контроллер, реализуемый на микропроцессоре, работает непрерывно во времени, и управляет состоянием реле в зависимости от текущего состояния реле . Время между изменением состоянием реле и изменением состояния должно быть минимальным. Данное требование должно быть учтено при разработке алгоритмов системы управления.
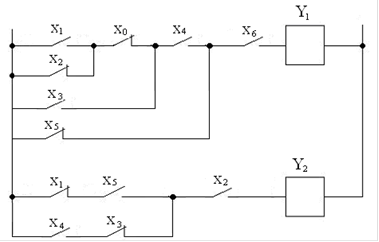
Рисунок 3 - Контакторная схема по варианту
алгоритм микропроцессор программный память
Выполнение
Анализ поставленной задачи
Необходимо реализовать фрагмент контактной схемы программным методом.
Я применил метод решения задачи, который позволяет реализовать работу данной схемы при использовании лабораторного стенда. Лабораторные стенды сопряжены с учебным микропроцессорным комплектом (УМК) на базе микропроцессора К580ВМ80А. Стенд подключен через внешний разъем, объединяющий шину адреса, шину данных и шину управления УМК. На лицевую панель стенда выведены линии шины адреса и шины управления. Стенд представляет собой набор микросхем, из которых при помощи внешних проводников собирается нужная схема. Часть соединений выполнена внутри стенда.
Следует сказать несколько слов о вводе-выводе данных. Ввод-вывод данных - это режим, при котором микропроцессор принимает данные из внешнего устройства или передает их во внешнее устройство. Для организации обмена данными используются три шины: адреса, данных и управления. На шину адреса микропроцессор выставляет адрес внешнего устройства, по шине данных передаются данные, шина управления управляет внешними устройствами в соответствии с их временными диаграммами.
Подключение устройств ввода-вывода к микропроцессорной системе осуществляется через порты ввода-вывода. В общем случае порт ввода - это обычный буфер, а порт вывода - буферный регистр. Активизация портов происходит при выставлении адреса порта и управляющем сигнале "чтение" или "запись".
Ввод данных будет происходить следующим образом: входные сигналы будут подаваться непосредственно на шину данных путем подачи на контакты напряжения с уровнем логической 1 или 0 (земля) с помощью проводников. Этим я обеспечил непрерывность подачи текущих состояний реле. Во время подачи соответствующего сигнала процессору эти данные будут считываться и сохраняться в одном из регистров.
Соответствие номера реле и разряда бита шины адреса:
| х | X6 | X5 | X4 | X3 | X2 | X1 | X0 |
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
х - незначащий бит.
Обычно при чтении данных, прежде всего, микропроцессором выставляется адрес устройства, данные которого будут прочитаны; на управляющем выходе DBIN микропроцессор выставляет сигнал чтения (приема) данных; по сигналу чтения внешнее устройство выставляет на шину данных данные, которые считываются микропроцессором; микропроцессор снимает сигнал чтения, внешнее устройство снимает данные с шины; микропроцессор снимает адрес внешнего устройства. Стоит отметить, что нам не важен ни адрес, выставляемый микропроцессором, ни сигнал на управляющем выходе, так как процессор только считывает данные, которые непосредственно выставляются с помощью проводников.
Далее идет обработка сигнала, сохраненного в регистре. В программе 1 применяется сдвиг аккумулятора вправо и влево для того, чтобы сигналы использовали одинаковый разряд, что позволяет производить над ними нужные мне логические операции. Так как данную схему можно представить в виде логической схемы, то при реализации метода я использовал операции логического сложения, умножения, а также инвертирование аккумулятора, которое использовалось для описания логики работы нормальнозамкнутых контактов. Также применялось маскирование данных во избежание ошибки при выводе выходных данных.
При выводе предполагалось применить несколько способов, в том числе запись результатов в оперативное запоминающее устройство (ОЗУ). ОЗУ предназначено для хранения оперативной (изменяемой) информации. Для ОЗУ предусмотрено три режима работы: режим хранения данных при отсутствии обращения к ОЗУ, режим чтения данных и режим записи новых данных. Каждое запоминающее устройство включает в себя средства адресации, накопитель информации и устройство управления. Накопитель информации состоит из запоминающих элементов (элементов памяти), число которых равняется емкости запоминающего устройства. Под элементами памяти подразумеваются элементарные схемы, предназначенные для приема, хранения и выдачи одного бита информации. Для подключения ОЗУ к микропроцессорной системе используют шины: адреса, данных и управления. При подключении памяти необходимо учесть нагрузочную способность микропроцессора и применяемых ОЗУ. При необходимости для согласования нагрузочной способности между МП и памятью включают схемы согласования (буферы). В общем случае схемы согласования используются для всех трех шин. При подключении блока ОЗУ к микропроцессорной системе необходимо также учитывать временные параметры используемых микросхем. Во избежание сбоев в чтении или записи данных временные параметры микросхем ОЗУ должны соответствовать временным параметрам работы микропроцессора. Использование схем согласования увеличивает временные задержки между сигналами управления. Обычно при записи данных микропроцессором выставляется адрес устройства, в которое будут записываться данные; микропроцессором выставляются данные на шину данных; на управляющем выходе "запись" микропроцессор выставляет сигнал записи данных; микропроцессор снимает сигнал записи; микропроцессор снимает данные с шины данных и адрес с шины адреса.
Программа 2 составлена на основе таблицы 1, которая, в свою очередь, составлена на основе исходной контакторной схемы.
Таблица 1 - Таблица истинности.
| X6 | X5 | X4 | X3 | X2 | X1 | X0 | Y1 | Y2 |
| 1 | x | 1 | x | x | 1 | 0 | 1 | х |
| 1 | x | 1 | x | 0 | x | 0 | 1 | х |
| 1 | x | 1 | 1 | x | x | x | 1 | х |
| 1 | 0 | x | x | x | x | x | 1 | х |
| x | 1 | x | x | 1 | 0 | x | х | 1 |
| x | x | 1 | 0 | 1 | x | x | х | 1 |
х - незначащий бит.
Следует отметить, что при реализации данной таблицы истинности, был учтен тот факт, что значения Y1 и Y2 могут одновременно равняться единице.
Программа 3 составлена для минимизации времени выполнения поставленной задачи. Для этого между шиной данных и портом ввода данных в микропроцессорный комплект необходимо установить гальваническую развязку, благодаря которой входное слово будет иметь следующий вид:
| х | X0 | X1 | X2 | X3 | X4 | X5 | X6 |
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
Данное действие позволяет уменьшить время выполнения программы, которое будет зависеть от состояний реле. Например, если состояния реле Х6 и Х2 равны нулю, то цикл программы будет иметь наименьшее время выполнения.
Блок-схема 1
Ниже приведена подробная блок-схема алгоритма решения поставленной задачи.