 2020-04-07
2020-04-07 113
113Реализация преимуществ частотно регулируемых приводов (ЧРП) зависит от структуры и характеристик преобразователей частоты (ПЧ), которые предопределяют гармонический состав напряжения и тока в обмотках приводного двигателя, потери в меди и стали, пульсации электромагнитного момента, а также влияние привода на сеть. В связи с ограниченными значениями рабочих напряжений быстродействующих элементов силовой электроники ВВ преобразователи должны выполняться по многоуровневым схемам. Наиболее перспективной является структура на ЮВТ/ЮСТ модулях и переключаемых (плавающих) конденсаторах. Эту структуру отличает отсутствие фиксирующих диодов, равномерное распределение потерь в элементах, возможность непосредственного подключения к сети без согласующего трансформатора через обратный инвертор и др. Несмотря на значительный объем исследований в этом направлении, остается нерешенным ряд задач, препятствующих широкому использованию подобных преобразователей в ВВ электроприводах. К таким задачам относится вопрос обеспечения эффективного режима функционирования преобразователя в условиях разброса его параметров и возмущений со стороны электропривода и сети. Поэтому тема исследований, направленных на повышение эффективности ВВ электропривода газоперекачивающих агрегатов на базе многоуровневого ПЧ является актуальной. Анализ разработок в области приводов ГПА, Стабилизация сбалансированного режима преобразователя частоты в условиях возмущений со стороны двигателя и сети обеспечивается путем автоматической коррекции длительности избыточных состояний ключей, влияющей на баланс напряжений. Оценка текущих значений контролируемых величин осуществляется с помощью наблюдателя напряжений, алгоритм работы которого основан на уравнениях равновесия напряжений и токов преобразователя частоты, таблице возможных состояний ключей и динамических уравнениях асинхронного двигателя [1-4].
Для реализации энергосберегающего высоковольтного электропривода газоперекачивающих агрегатов мощностью несколько мегаватт преобразователь частоты должен строиться на базе многотактной и многоуровневой структуры. Непрерывность технологического процесса в случае провала напряжения сети достигается стабилизацией напряжения звена постоянного тока преобразователя частоты за счет кинетической энергии, запасенной в роторе газопе-рекачивающего агрегата.
В частотной области регулирования газоперекачивающего агрегата, соответствующей изменению глубины модуляции преобразователя частоты в пределах значений от 0,4 до 1, наименьшие искажения выходного напряжения достигаются при использовании схемы широтно-импульсной модуляции с пилообразным профилем сигналов несущей частоты и фазовым сдвигом между этими сигналами 120 градусов [7].
Для обоснования эффективного способа ШИМ и исследования процессов балансировки напряжений на переключаемых конденсаторах разработана модель четырехуровневого ПЧ в среде Simulink Matlab, которая отсутствует в стандартной библиотеке SimPowerSys- tems Blockset. Адекватность модели проверялась сопоставлением результатов моделирования с экспериментальными данными, полученными при исследовании прототипа преобразователя 6 кВ мощностью 2,6 MBA. Схема одной фазы 4-х уровневого инвертора показана на рисунок 1.
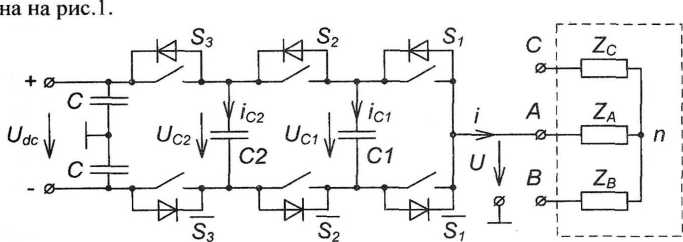
Рисунок 1. Схема фазы А четырехуровневого инвертора
В установившемся режиме, характеризующемся балансом напряжений на переключаемых конденсаторах Uс1 = Udc /3 и UC2 = 2Udc / 3, выходное напряжение ЧП определяется формулой
 (1)
(1)
Функция переключений k-ой пары комплементарных ключей  (k =1,2,3) формируется в результате сравнения модулиру-ющего сигнала частотой f и трех сигналов несущей частоты f треугольной (ШИМ-1) и пилообразной формы (ШИМ-2). Эти сигналы сдвинуты во времени на треть периода
(k =1,2,3) формируется в результате сравнения модулиру-ющего сигнала частотой f и трех сигналов несущей частоты f треугольной (ШИМ-1) и пилообразной формы (ШИМ-2). Эти сигналы сдвинуты во времени на треть периода  как показано на рисунке 2 для случая f =0. Символы «+» и «-» означают заряд и разряд конденсаторов, а символ «0» означает неизменность напряжений Uc1, Uc2
как показано на рисунке 2 для случая f =0. Символы «+» и «-» означают заряд и разряд конденсаторов, а символ «0» означает неизменность напряжений Uc1, Uc2
Существует восемь возможных комбинаций состояния ключей ( ,
,  ,
,  ). Конденсатор C1 участвует в формировании выходного напряжения при комбинациях ключей 2-(100) и 7-(011), конденсатор С2 - при комбинациях 4-(110) и 5-(001), оба конденсатора - при комбинациях З-(ОЮ) и 6-(101); при комбинациях 1-(000) и 8-(111) напряжения на конденсаторах не влияют на выходное напряжение. Если в пределах рабочего цикла длительности зарядно-разрядных комбинаций (2 и 7), (4 и 5), (3 и 6) одинаковы, то имеет место есте-ственный баланс напряжений на конденсаторах, достигаемый за счет избыточности состояний ключей для обоих способов модуляции.
). Конденсатор C1 участвует в формировании выходного напряжения при комбинациях ключей 2-(100) и 7-(011), конденсатор С2 - при комбинациях 4-(110) и 5-(001), оба конденсатора - при комбинациях З-(ОЮ) и 6-(101); при комбинациях 1-(000) и 8-(111) напряжения на конденсаторах не влияют на выходное напряжение. Если в пределах рабочего цикла длительности зарядно-разрядных комбинаций (2 и 7), (4 и 5), (3 и 6) одинаковы, то имеет место есте-ственный баланс напряжений на конденсаторах, достигаемый за счет избыточности состояний ключей для обоих способов модуляции.
Отличие переключающих функций  (t) и их разностей для ШИМ-1 и ШИМ-2 приводит в соответствии с (1) к разным показателям качества выходного напряжения u(t). Сравнение методов ШИМ целесообразно производить по фактору гармонических искажений HDF, зависящему только от глубины модуляции т. Поскольку квадрат действующего значения тока высших гармоник пропорционален этому параметру, то можно утверждать, что с уменьшением HDF снижаются потери энергии в стали и меди, а также уменьшаются колебания электромагнитного момента. В работе рассматриваются зависимости HDF= f (m) для скалярного закона частотного управления приводом.
(t) и их разностей для ШИМ-1 и ШИМ-2 приводит в соответствии с (1) к разным показателям качества выходного напряжения u(t). Сравнение методов ШИМ целесообразно производить по фактору гармонических искажений HDF, зависящему только от глубины модуляции т. Поскольку квадрат действующего значения тока высших гармоник пропорционален этому параметру, то можно утверждать, что с уменьшением HDF снижаются потери энергии в стали и меди, а также уменьшаются колебания электромагнитного момента. В работе рассматриваются зависимости HDF= f (m) для скалярного закона частотного управления приводом.
Для получения этих зависимостей выполнены измерения взвешенного коэффициента искажений WTHD:
 (2)
(2)
Этот коэффициент характеризует искажения синусоидальности идеально интегрированного ШИМ напряжения, что соответствует искажениям тока чисто индуктивной нагрузки инвертора. Связь величин HDF и WTHD выражается формулой
 (3)
(3)
Вычисление WTHD по формуле (2) является трудоемкой операцией, требующей учета множества гармоник. Для упрощения расчетов эта формула приведена к виду
 (4)
(4)
где u(0) - выходное напряжение, 0=wt, U1- действующее значение
первой гармоники напряжения.
Значения WTHD определялись автоматически с помощью расчетных блоков Simulink Matlab. Коэффициенты искажений синусоидальности кривой тока THDi и кривой напряжения THD„ находились с помощью анализатора спектра. Исследования производились для законов управления асинхронным приводом  =const и U / f =const при U =6 кВ, f =10-50 Гц, f =600 Гц, f =1200 Гц и Р =1,5 МВт.
=const и U / f =const при U =6 кВ, f =10-50 Гц, f =600 Гц, f =1200 Гц и Р =1,5 МВт.
Результаты исследований показали, что независимо от закона управления и частоты ШИМ экспериментальные точки группируются в пределах двух кривых, соответствующих сравниваемым методам ШИМ-1 и ШИМ-2 (рис.За). Это свидетельствует о том, что используемый для сравнения методов ШИМ параметр HDF зависит только от глубины модуляции m. Из графиков HDF(m) и THDu(m) следует, что в практически важной области частотного регулирования приводом ГПА 0,4<m<1 метод ШИМ-2 с пилообразной формой развертывающего сигнала обеспечивает наилучшее качество напряжения по сравнению с методом ШИМ-1. В связи с относительно высоким значением эквивалентной частоты переключений f sе=3 f s=1,8 кГц уровень искажений формы
тока THDi=2-3% в этой области регулирования удовлетворяет требованиям электромагнитной совместимости ПЧ и двигателя.


Рисунок 2 - Зависимости фактора гармонических искажений HDF (а) и коэффициентаискажений синусоидальности напряжения THD и (б) от глубины модуляции m.








