 2020-04-12
2020-04-12 325
325В систему управления авиадвигателями входят автоматические устройства, которые подразделяют на автоматы и регуляторы. Регуляторы служат для поддержания параметров на заданном уровне с целью обеспечения рабочего процесса. Они вместе с двигателем образуют замкнутую систему автоматического регулирования, действующую по принципу отклонения. Значения параметров могут меняться в процессе управления авиадвигателем. Автоматы предназначены для ограничения пределов изменения параметров, характеризующих рабочий процесс, и вместе с двигателем образуют разомкнутую систему, реагирующую на определенные уровни внешних воздействий. Взаимодействие элементов автоматики авиадвигателя должно обеспечивать надежное включение форсажа и управление тягой на форсажном режиме, не допуская срыва пламени в форсажной камере и изменения режима работы турбокомпрессора путем подачи необходимого количества топлива и поддержания определенного значения открытия створок реактивного сопла.
В схему управления ТВД стоят гидромеханический регулятор угловой скорости, воздействующий на угол установки лопастей воздушного винта изменяемого шага (ВИШ), и электрогидравлический регулятор температуры газов за турбиной, корректирующий подачу топлива в рабочие форсунки. Значение угловой скорости ВИШ определяет положение рычага управления двигателем (РУД). Температуру выходных газов контролируют с помощью термопар, выдающих сигнал в виде напряжения, которое сравнивается с постоянным электрическим сигналом и усиливается, после чего система воздействует на слив части топлива, поступающего от автомата дозировки топлива в рабочие форсунки. Дозировка топлива меняется с перемещением РУД и корректируется по температуре газов за турбиной.
В систему управления режимами работы авиадвигателя входят датчики угловой скорости ротора высокого давления, реле времени и электрогидравлический привод управления створками реактивного сопла. Датчики выполнены в виде центробежных регуляторов, воздействующих на цепь управления реле времени. Схема соединения реле времени с датчиками дана на рис. 15.4,а. Для управления реле используют два датчика: ДС-1 и ДС-2, причем датчик ДС-1 срабатывает при меньшей частоте вращения, чем датчик ДС-2. Однако замыкание контактов 1ДС-1 датчика ДС-1 не обеспечивает подачу напряжения на обмотку реле К1, так как контакты 2К1 разомкнуты. Срабатывание датчика ДС-2 при большей угловой скорости ротора вызывает срабатывание реле К1, которое замыкает свои контакты 1К1, 2К1. При срабатывании реле подается сигнал на открытие створок. При уменьшении угловой скорости размыкаются контакты 1ДС-2 датчика, но это не приводит к отключению обмотки реле К1 от шины питания, поскольку она питается через контакты 1К1 и контакты 1ДС-1. Размыкание контактов 1ДС-1 при меньшей угловой скорости ротора приводит к отключению обмотки реле от шины и размыканию контактов 1К1. При этом створки прикрываются. Открытие створок при большей угловой скорости ротора и их закрытие при меньшей угловой скорости предотвращают автоколебательный режим: створки открываются и закрываются при разных угловых скоростях ротора высокого давления.
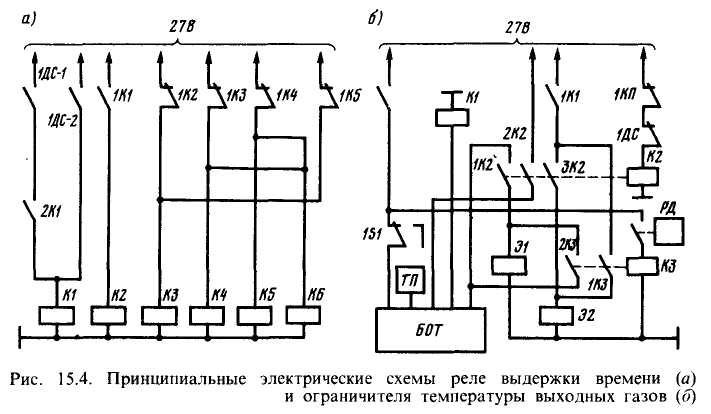
Реле времени служит для задержки открытия створок сопла и задержки включения форсажного насоса. Оно состоит из четырех реле. Отсчет выдержки времени начинается с момента замыкания контактов 1К1 и подачи питания на обмотку реле К2, которое размыкает контакты 1К2 и обесточивает обмотку реле КЗ, что приводит к размыканию контактов 1КЗ и обесточиванию реле К4 и так далее до обесточивания реле Кб. Реле Кб отпустит после размыкания контактов всех реле времени.
Привод управления створками сопла электрогидравлический. С его помощью в процессе управления плавно изменяется площадь критического сечения реактивного сопла по мере изменения подачи форсажного топлива на форсажных режимах работы авиадвигателя. Привод вступает в работу при положении РУД, соответствующем форсажному режиму.
Электропривод флюгирования винтов применяют на ЛА с турбовинтовыми двигателями. С помощью его изменяется на определенный угол положение лопастей ВИШ. При выходе из строя авиадвигателя винт устанавливается во флюгерное положение, при котором он создает наименьшее сопротивление полету ЛА. Управление флюгированием может быть автоматическим и ручным. Автоматическое флюгирование выполняется:
при уменьшении крутящего момента, развиваемого авиадвигателем, ниже определенного значения (0,1 M НОМ), когда установлен режим мощности выше номинальной (выше 0,7 Р НОМ);
при появлении чрезмерной отрицательной тяги винта;
при увеличении частоты вращения ротора выше допустимой.
Ручное управление флюгированием осуществляется включением флюгерного насоса кнопкой флюгирования. При установке винта во флюгер двигатель отключается прекращением подачи топлива. Винт из флюгерного положения выводится подачей масла в полость гидроцилиндра через золотник с электромагнитным приводом.
При подготовке Л А к полету проверяют систему флюгирования. \ Убеждаются, что нет механических повреждений, проверяют надежность Крепления, а также работоспособность всех узлов. Для проверки флюгирования по отрицательной тяге двигатель переводят на режим малого газа, включают электрогидрокран проверки, подающий масло в полости винта для поворота их в положение отрицательной тяги (об этом сигнализирует загорание лампы). При работающем двигателе проверяют систему на частичное флюгирование без прекращения подачи топлива.
При эксплуатации следящих приводов управления входными устройствами необходимо учитывать, что отказ системы управления может привести к их самовыключению. Поэтому перед полетом выключатели цепей управления на пульте устанавливают в положение автоматической работы и убеждаются, что стрелки приборов, контролирующих положение створок, конуса и клиньев, находятся на нуле. В полете контроль за приводами выполняют по указателям, сигнальным лампам и по внешним проявлениям работы воздухозаборника. При возникновении помпажа двигатель выключают. Во время проведения регламентных работ проверяют диаграмму управления электроприводами с помощью поверочной установки, позволяющей изменять давление гидросмеси в системе.
Ограничитель температуры выходных газов служит для ограничения максимально допустимой температуры выходных газов авиадвигателя, а также выдачи команд на останов двигателя при предельной температуре. Температура ограничивается уменьшением подачи топлива в камеру сгорания с последующим отключением двигателя с помощью электромагнитного клапана останова по сигналу, выдаваемому ограничителем температуры. Ограничитель температуры работает на земле при пуске двигателя и на высоте более 5000 м. Он имеет два режима: «Ограничение» и «Останов». Ограничение происходит при температуре 650 °С, а останов -при 680 °С. На земле настройка уменьшается на 80 °С с помощью сигнала, посылаемого в блок ограничения температуры. В комплект ограничителя температуры входят четыре термопары ТП (рис. 15.4,6; на рисунке показана одна термопара), блок ограничения температуры БОТ и реле давления РД.
При запуске двигателя срабатывает реле К2, которое своими контактами подготавливает цепи ограничения температуры останова двигателя и подает сигнал на блок БОТ для уменьшения настройки на 80°С. Реле К2 запитано через выключатель 1КП положения клапанов перекачки и выключатель 1ДС датчика скорости вращения ротора авиадвигателя. Если температура газа превысит температуру ограничения режима работы двигателя, блок БОТ выдаст сигнал на обмотку Э1 электромагнита слива топлива через контакты 1К2. Если температура при этом не снизится, блок БОТ подаст питание на реле К1, а через его контакты 1К1 и контакты ЗК2 подведено будет на обмотку 32 электромагнитного крана клапана останова стоп-насоса регулятора для автоматического отключения двигателя, а также включения табло «Останов температуры газов».
Для снятия питания с обмотки Э2 и подготовки двигателя к следующему запуску рычаг останова переводят в положение «Останов» и он размыкает контакты 1S1, концевого выключателя и снимает питание с блока БОТ.
При выходе двигателя на режим более 5500 об/мин ограничитель, температуры отключается, так как выключатель 1ДС разрывает цепь питания реле К2. В полете на высоте более 5000 м срабатывает реле давления РД. Своими контактами оно замыкает цепь реле КЗ. Через контакты 1К2 с блока БОТ напряжение подводится на обмотку Э1. Контакты ЗК2 подготавливают цепь включения обмотки Э2. Если температура не снизилась, сигнал от блока БОГ следует на обмотку реле К1, которое срабатывает и своими контактами 1К1 замыкает цепь питания обмотки Э2 через контакты ЗК2. В результате этого двигатель отключается.
При эксплуатации ограничителя температуры газов следят за состоянием и чистотой штепсельных разъемов, периодически измеряют сопротивление изоляции термопар. Работоспособность ограничителя температуры проверяют на работающем двигателе изменением настройки регулятора.
Автомат тяги предназначен для стабилизации скорости полета ЛА. Принцип действия его основан на измерении разности скоростей полета ЛА: текущей и заданной приборной скоростей. Сигнал, пропорциональный разности этих скоростей, вместе с сигналом тангажа и сигналом, пропорциональным линейному ускорению по продольной оси, поступает в вычислитель, который преобразует их в соответствии с законом управления. Выходной сигнал с вычислителя идет на интегрирующий привод, а он перемещает ручки управления двигателями для изменения тяги с целью поддержания постоянства скорости полета.
Схема автомата тяги показана на рис. 15.5. В ее состав входят пульт управления, на котором расположены кнопки, выключатели и переключатели; указатели приборной и текущей скоростей, сигнализаторы нарушения питания, датчики сигнализатора рассогласования текущей и приборной скоростей, вычислитель привода автомата и система встроенного контроля, смонтированные на приборных досках, а также электродвигатели, муфты, реле, рычаги управления двигателями РУД, концевые выключатели, диоды, дискриминатор, сигнальная лампа.
|
|
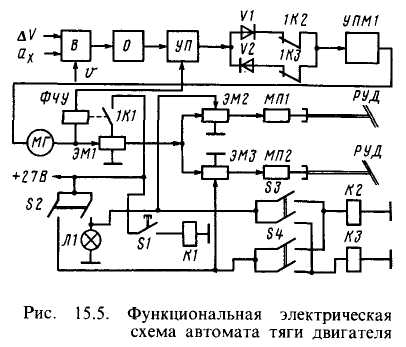
На вход вычислителя В поступают сигнал отклонения скорости ∆V с указателя скорости; сигнал, пропорциональный ускорению ах, снимаемый с блока датчиков линейных ускорений, и сигнал, пропорциональный скорости V тангажа, поступающий с автоматической бортовой системы (АБСУ). С выхода вычислителя сигнал через ограничитель О следует на промежуточный усилитель привода УП. Одновременно в усилитель УП вводится сигнал скоростной обратной связи с исполнительного механизма (тахогенератора).
Вычислитель, усилитель привода, элементы коммутации и логики, а также система встроенного контроля конструктивно объединены в блок автоматики. В нем установлены и усилители следящей системы и фазочувствительный ФЧУ. Исполнительный механизм, перемещающий рычаги управления двигателями РУД, состоит из управляемого двухфазного двигателя-генератора МГ, электромагнитной порошковой муфты ЭМ1, служащей для включения исполнительного механизма автомата тяги, редуктора, электромагнитных порошковых муфт ЭМ2, ЭМЗ, служащих для подключения рычагов РУД и пересиливания работающего механизма, снабженного муфтами пересиливания МП1, МП2. Усилитель привода механизма УПМ1 управляет двигателем-генератором МГ.
Автомат тяги работает в двух режимах: «Подготовка» и «Управление». Режим «Подготовка» необходим для того, чтобы перед включением автомата тяги на режим управления стабилизировать текущую и приборную скорости. Режим «Управление» включает два подрежима: «Стабилизация» и «Задание скорости». В режим управления автомат тяги вводится после окончания режима «Подготовка» нажатием кнопки S1, через которую подается питание на обмотку реле К1. Контакты 1К1 одновременно запитывают электромагнитные муфты ЭМ1 - ЭМЗ, замыкающие кинематическую цепь от двигателя до рычагов РУД при замкнутом выключателе S2. Вращение выходного вала муфт МП1 (МП2) передается на рычаги РУД, изменяющие подачу топлива в камеры сгорания авиадвигателя.
На схеме показаны также спаренные концевые выключатели S3 максимального газа и S4 минимального газа, через которые в замкнутом состоянии подается питание на реле К2 и КЗ, управляющие контактами 1К2 и 1КЗ.
Для включения автомата в работу нажимают кнопку S1 и запитывают реле К1 напряжением 27 В. Реле К1 срабатывает и через контакты 1К1 подает питание на электромагнитную муфту ЭМ1. Муфты ЭМ2 и ЭМЗ, включающие муфты МП1 и МП2, запитаны от выключателя S2. Через него же идет питание к сигнальной лампе Л1. Выключатели S3 и S4, реле К2 и КЗ, диоды VI и V2 отключают автомат тяги в крайних положениях рычагов (РУД).
При срабатывании концевых выключателей S3 максимального газа подается питание на обмотку реле К2, в результате чего контакты 1К2 размыкаются и сигнал с усилителя привода по полярности, соответствующей перемещению РУД в направлении увеличения тяги, не поступает на диод VI преобразователя УПМ1, и двигатель перестает вращаться в сторону увеличения тяги. Двигатель может начать вращаться только на уменьшение тяги.
Это происходит при поступлении на диод V2 преобразователя УПМ1 управляющего сигнала полярности, соответствующего уменьшению тяги двигателя.
При срабатывании концевого выключателя S4 малого газа напряжение подается на обмотку реле КЗ. Контакты 1КЗ размыкаются, и сигнал с выхода усилителя двигателя по полярности на уменьшение тяги не проходит.
Через диод VI может пройти сигнал только в направлении перемещения РУД на увеличение тяги. Двигатель останавливается и может начать вращение только при появлении управляющего сигнала на диоде VI, соответствующего перемещению РУД в направлении увеличения тяги.
Управляют режимами с пульта управления с помощью ручной коммутационной аппаратуры (кнопок, переключателей) и реле, обеспечивающих необходимые переключения цепей управления.








