 2020-04-20
2020-04-20 262
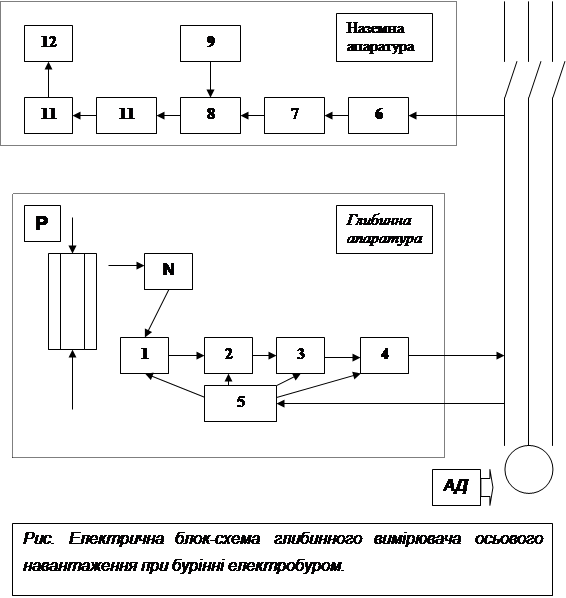
262Для неперервного контролю з поверхні за величиною осьового навантаження безпосередньо на забої свердловини розроблений пристрій автоматичного контролю осьового навантаження для постійної експлуатації в умовах буріння,а також для проведення комплексу досліджень зусиль,що діють у колоні труб при бурінні свердловин електробуром.
Пристрій автоматичного контролю осьового навантаження ГИУ-ОН складається з трьох вузлів:вибійного датчика, каналу зв’язку та наземної апаратури.
Основною та найбільш відповідальною частиною пристрою є вибійний датчик. В випадку вимірювання осьового навантаження на долото забійний датчик встановлюється в колоні бурильних труб і нагвинчується на електробур.
Пружний чутливий елемент давача 1 (рис.) виконаний в вигляді короткої ділянки,деформація якої визначається значенням осьового зусилля в колоні. Деформація пружного чутливого елементу за допомогою трьох індуктивних перетворювачів 2 малих переміщень перетворюються в частотно-модульований сигнал,який передається на поверхню по струмопроводу електробура шляхом накладання на струм живлення забійного двигуна. Перетворювачі встановлюються рівномірно по колу,що виключає вплив згинаючого моменту. На торець пружного елементу кріпиться товстостінний контейнер 3.
Контейнер виконаний в вигляді герметичного циліндричного корпуса,в якому розміщена глибинна електронна апаратура.
Інформація значення осьового навантаження передається на поверхню шляхом частотної системи телевимірювання,що має значну завадозахищеність і незалежність вимірювального сигналу від змінних у процесі буріння параметрів каналу зв’язку.
В герметичному контейнері вибійного датчика (рис.) розміщені: генератор частотно-модульованих коливань 1,підсилювач напруги 2,підсилювач потужності 3,фільтр верхніх частот 4,що фільтрує сигнал на вході глибинного приладу,блок живлення 5.
Живлення глибинної апаратури здійснюється шляхом відбору потужності від струмопроводу електробура.
На поверхні встановлюється в станції керування електробура з’єднувальний фільтр 6,призначений для розділення частоти вимірювального високочастотного каналу й струму промислової частоти.
Частотно-модульований вихідний сигнал поступає на вхід частотного перетворювача, що складається з: підсилювача вхідного сигналу 7, змішувача 8, генератора опорної частоти 9,підсилювача проміжної частоти 10,ємнісного частотоміра 11,реєструючого приладу 12.
Технічні характеристики:
Межі вимірювання осьового навантаження,тс. 0...40
Основна похибка всього пристрою,не більше,% 5
Номінальна напруга живлення глибинної апаратури,В 1250
Допустима зміна напруги живлення,при якій значення похибки не перевищує граничної: -30%...+30%
Допустимою є робота вибійного датчика при гідростатичному тиску до 600 кгс/см2 і температурі до 100 оС
 |
 Вибійні пристрої подачі долота (ППД)
Вибійні пристрої подачі долота (ППД)
Буріння на великих глибинах (3000 – 5000 м) за допомогою наземних автоматичних пристроїв подачі долота є малоефективною через сили тертя бурильної колони об стінки свердловини, що значно спотворюють вимірювані на поверхні осьові навантаження на долото. При турбінному бурінні сили тертя колони труб об стінки свердловини збільшуються, тому що колона труб нерухома. Крім цього на стійку роботу турбобура впливають короткочасні зміни моменту навантаження. Із збільшенням глибини може виникнути нестійкий режим роботи турбобура. На практиці бурильники для того, щоб уникнути зупинок турбобура, працюють при малих навантаженнях і великих швидкостях буріння,внаслідок чого погіршуються показники буріння.
Одним з рішень задачі керування вибійним двигуном-турбобуром може бути створення швидкодіючих наземних пристроїв, що працюють за сигналами від давачів установлених на вибої. Незважаючи на це, створення ППД такого типу вимагає надійних вибійних давачів, а також виконавчих механізмів ППД, більших встановлених потужностей та надійних каналів зв’язку.
Проблема автоматизації глибокого буріння може бути вирішена також переносом регулюючого та виконавчого механізмів безпосередньо на вибій, де ППД міг би переробляти на місці всю інформацію, що отримується в процесі буріння і видавати команди керування виконавчому механізму. Такі ППД повинні забезпечити регулювання параметрів режиму буріння і зробити його малозалежним від сил тертя, що особливо важливо при проведенні буріння глибоких свердловин.
Застосування пристроїв автоматичного керування подачею долота на вибій в глибинному виконанні дозволить використовувати дійсні значення вибійних параметрів і параметрів, що відповідають максимальній потужності вибійного двигуна.
Характерною рисою більшої частини таких ППД є їх телескопічне виконання,тобто виконання з розподілом низу колони бурильних труб. В телескопі одна частина пристрою з’єднана з колоною труб, а інша – з турбобуром, або породоруйнуючим інструментом (при роторному бурінні). Розподіл низу дозволяє створювати осьові навантаження на долото незалежно від сил тертя колони об стінки свердловини.
Виконавчий механізм вибійних ППД повинен переборювати силу, що створюється не всією вагою бурильної колони, а тільки її частиною – навантаженням на долото. Ось чому потужність таких ППД (при однакових швидкостях подачі) може бути меншим потужності наземних пристроїв, виконавчі механізми яких повинні бути розраховані на повну вагу колони, причому реверсивні виконавчі механізми повинні розраховуватись на підйом усієї колони.
Слід відмітити 2 основних напрямки розробки пристроїв вибійних ППД:
- ППД із використанням бурового розчину в якості робочого агенту, в якому всі виконавчі, регулювальні, вимірювальні механізми працюють на буровому розчині.
- ППД автономного типу, всі механізми якого ізольовані від дії бурового розчину і працюють на робочому агенті – маслі. Крім цього є ППД, що керують протіканням бурового розчину, який проходить через вибійний двигун і ППД з фіксацією нижньої частини колони бурильних труб об стінки свердловини.
На рисунку наведена схема ППД, в якому в якості робочого агента використовується буровий розчин. Він складається із з*єднаного з колоною бурильних труб корпуса 1 та поршня 2 з порожнинним квадратним штоком 3, на який нагвинчується обтяжений низ колони з долотом. Ущільнення поршня 2 притискається до внутрішньої поверхні циліндра з допомогою стальних пружин.
Пристрій призначався для боротьби з викривленням свердловини, що досягалось обмеженням осьового навантаження на долото, створюваного вагою з’єднаного з ним обтяженого низу і гідравлічним зусиллям, що діє на поршень від перепаду тиску на долото.
На рис. показана схема ППД з регулюючим клапаном,що працює при постійному осьовому навантаженні. Корпус сервоциліндра 6 жорстко зв’язаний з бурильною колоною,а поршень 5 –через шток 2 з турбобуром. Зверху на поршень 5 постійно діє гідравлічний перепад тиску на турбобурі та долоті. Переміщуючись вниз під час буріння,поршень 5 витісняє рідину з підпоршневного простору 4 через клапан 3,на якому за рахунок дроселювання виникає постійний перепад тиску. Цей перепад тиску діє на поршень 5 знизу,здійснюючи його гальмування,внаслідок чого регулюється осьове навантаження на долото. Осьове навантаження Q2 рівне різниці між сумою гідравлічного зусилля,що діє зверху на поршень 5 (добуток перепаду тиску на турбіні pT та долоті pдол на площу Sп поршня),і ваги турбобура GT і гідравлічного зусилля,що діє на на поршень знизу (добуток перепаду тиску pk на клапані 5 на активну площу поршня в порожнині 4):
Q2=(pT+pдол)Sп+GT-pkSп;
Регулюючий клапан настроюється на задану величину.Для перезаряду сервоциліндра передбачений зворотній клапан 1.
До вибійних напівавтоматів подачі долота належить також ППД,що підтримують сталість певного параметру режиму буріння. В якості такого параметра регулювання прийнято вважати частоту обертання турбобура,або обертовий момент на долоті. Виконавчим механізмом вибійних напівавтоматів є сервоциліндр,що працює на буровому розчині,корпус якого зв’язаний з колоною труб.
Його порожнистий шток зв’язано з турбобуром. Дія повного перепаду тиску на турбобурі і долоті в зоні 3 на переріз штоку 1,що переміщується в ущільненні 2,створює постійну складову осьового навантаження на долото. До нього може додаватися,або відніматися зусилля від гідравлічного тиску на коловий перетин поршня 4. Цей тиск змінюється в залежності від положення золотника 5,керування яким здійснюється в залежності давачем 6,що діє в функції вибраного параметра регулювання. Для реверсу подачі при перевантаженнях необхідно,щоб гідравлічне зусилля на поршень 4 перевищувало сумарну величину власної ваги турбобура і гідравлічної сили,що діє на торець штока 1. В якості давача в вибійних ППД використовують працюючий в середовищі бурового розчину пружинний манометр,відцентровий регулятор швидкості і гідравлічний манометр,що складається з золотника з різновеликими поясками та пружиною. В залежності від використаного давача регулювання турбобура може здійснюватися за принципом постійності підтримання обертового моменту на долоті або постійності обертання турбобура.
Глибинні та глибинно-наземні напівавтомати найбільш повно вирішують завдання керування турбобуром і підтримання режиму буріння. При розміщенні вимірювального пристрою безпосередньо біля турбобура вирішується проблема вимірювання вибійних параметрів без застосування каналів зв’язку між вибоєм та поверхнею.
Якщо додатковий пристрій розміщений безпосередньо біля вибою,можна створити систему з хорошими динамічними характеристиками. Таким чином,із допомогою глибинних ППД можливо одночасно вирішити задачу збільшення і статичної,і динамічної точності, також вирішити проблему керування турбобуром при глибинному бурінні.








