 2020-05-11
2020-05-11 129
129Лабораторная работа №3
Задание: Определить расстояние видимости на автомобильной дороге и подъезде к ней.
Расчет выполнить для трех схем видимости:
1. Остановка водителем перед препятствием;
2. Торможение двух автомобилей, двигающихся навстречу друг другу;
3. Обгон легковым автомобилем грузового автомобиля при наличии встречного движения.
Исходные данные для расчета приведены в табл.1.
Таблица 1 – Исходные данные для расчета
| Наименование характеристики | Номер варианта | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Расчетная скорость движения: | ||||||||||
| легкового автомобиля VЛ | соответствует расчетной скорости для принятой категории дороги | |||||||||
| встречного автомобиля VВ | ||||||||||
| грузового автомобиля VГ | 50 | 55 | 40 | 45 | 50 | 40 | 50 | 70 | 65 | 60 |
| Наименование характеристики | Номер варианта | |||||||||
| 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | |
| Расчетная скорость движения: | ||||||||||
| легкового автомобиля VЛ | соответствует расчетной скорости для принятой категории дороги | |||||||||
| встречного автомобиля VВ | ||||||||||
| грузового автомобиля VГ | 60 | 60 | 50 | 60 | 50 | 40 | 50 | 70 | 40 | 70 |
Результаты расчетов записываются в таблицу:
| Расстояние видимости, м | |||||||
| Расчетные значения | Минимальное расстояние видимости (по СНиП 2.05.02-85) | ПРИНЯТО | |||||
| для остановки S1 | встречного автомобиля S2 | по условию обгона S3 | боковая видимость Sбок. | для остановки | встречного автомобиля | для остановки | встречного автомобиля |
Определение расстояния видимости на
автомобильной дороге и подъезде к ней.
Расстояние видимости дороги определяется по формуле:
1. Для расчета по I схеме видимости:

где VЛ – расчетная скорость легкового автомобиля, км/ч;
j – коэффициент продольного сцепления колес с дорогой при торможении, принимаемый для нормальных условий сцепления (чистое сухое покрытие) равным 0,5;
K – коэффициент, учитывающий эффективность действия тормозов, принимается для легковых автомобилей равным 1,3, для грузовых автомобилей, автопоездов и автобусов – 1,85.
В формуле отношение  – зазор безопасности может быть принят равным 5…10 м.
– зазор безопасности может быть принят равным 5…10 м.
2. Для расчета по II схеме видимости:

где VЛ , VВ – расчетная скорость легкового и встречного автомобилей соответственно, км/ч.
3. Для расчета по III схеме видимости:
 ,
,
где L1 – путь, пройденный легковым автомобилем с момента принятия решения об обгоне, в течение времени, когда он нагонит грузовой автомобиль и поравняется с ним, м;
L2 – путь, проходимый легковым автомобилем до возвращения на свою полосу движения, м;
L3 – путь, пройденный встречным автомобилем, за время обгона легковым автомобилем грузового, м.
Путь L1 определяется по формуле:
 ,
,
где l2 – расстояние между легковым и грузовым автомобилем в момент заезда на полосу встречного движения, м;
la = 4,5 м – длина грузового автомобиля.

Т1, Т2 – длина тормозного пути обгоняющего и обгоняемого автомобилей.
l1 – путь который пройдет автомобиль за время принятие решения об обгоне (прижимают равное 1 с)
Путь L2 определяется по формуле:
 ,
,
где l3 – расстояние равное длине тормозного пути обгоняемого автомобиля с учетом расстояния безопасности lЗ.Б .

Путь L3 определяется по формуле:
 .
.
Минимально необходимое расстояние боковой видимости:
 ,
,
где VЛ – расчетная скорость легкового автомобиля, км/ч; VП – скорость движения пешехода или транспортного средства по пересекающей дороге (может быть принята 10 км/ч;) S1 – расчетное расстояние видимости из условия остановки перед препятствием, м.
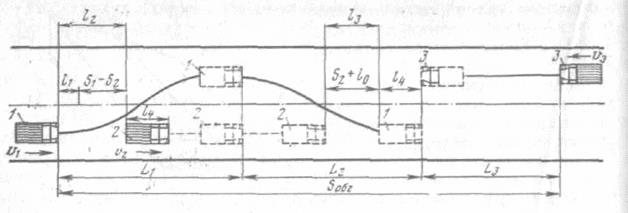
Рис.1. Схема определения расстояния видимости из условия обгона








