2020-05-12
2020-05-12 286
286Отношение СКП НП и градиента этого НП которого мы измеряем. m лп = m u /g, m u - зависит от способа измерения, g – зависит от вида НП, m лп ↓ → g ↑
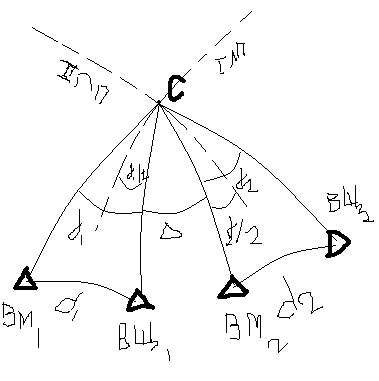
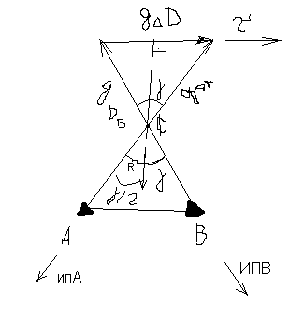 ; |gD|=1 Из прямоугольного треугольника образованным вектором разности дистанций А и В виден ½ модуля g, разность расстояний численно равна sin γ/2, следовательно |gD|= 2 sin γ/2. Высота опущенная в равнобедренном векторном треуг., одн-но является биссектрисой и перпенд., g. Градиент gΔD перпенд., высоте и соответственно биссектрисе – биссектриса явл., ЛП. Направление ЛП- R.
; |gD|=1 Из прямоугольного треугольника образованным вектором разности дистанций А и В виден ½ модуля g, разность расстояний численно равна sin γ/2, следовательно |gD|= 2 sin γ/2. Высота опущенная в равнобедренном векторном треуг., одн-но является биссектрисой и перпенд., g. Градиент gΔD перпенд., высоте и соответственно биссектрисе – биссектриса явл., ЛП. Направление ЛП- R.
; τ =
-в сторону ВЩ(для искл отр., результатов) |gD|= 2 sin γ/2, sin γ max при γ = 180 град., след., gΔDmax=2
sin γ min при γ = 0 град., след., gΔDmin=0
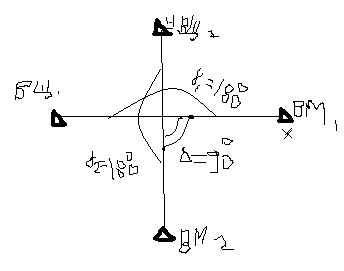
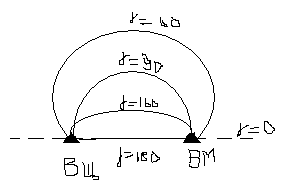
Поскольку g зависит от базового угла, то линиями с одинаковым значением ΔD будет окружность
Основные характеристики точности ОМС по ГРНС
Каждая пара станций даёт 1 ЛП. Для ОМС необходимо 2 ЛП, т.е. 2 пары станций. Технически возможно с совмещёнными и разомкнутыми парами станций
Совмещённые
, часто mΔD1= mΔD2= mΔD3=….= mΔD5
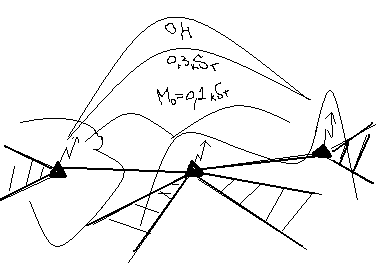
Геометр., фактор зависит только от взаимного расположения судна и ориентиров Мо= mΔD ·Г, для того чтобы Г минимизировать и уменьшить СКП ОМС необходимо γ1 = γ2=180 град и θ=90 град, но это невозможно т.к.
γ1 + γ2=360=0 – т.е. необходимо подбирать базовые углы в пределах 60< γ <150., 30< θ <75
Для априорной оценки ОМС по ГРНС удобно использовать атлас зон точности, на картах, схемах нанесены кривые равной точности
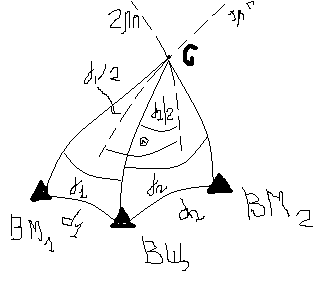
Разомкнутые базы Δ-угол схождения баз
НаличиеΔ позволяет обеспечить лучший угол пересечения ЛП