 2020-05-12
2020-05-12 662
662Глонасс и GPS Navstar – это глобальные всепогодные квазидальномерные ультракоротковолновые СРНС с корреляционным методом измерения, использующие ИСЗ на средних орбитах и обеспечивающие непрерывные высокоточные определения пространственных координат объекта, а также его вектора скорости.
| параметр | Глонасс | GPS NAVSTAR |
| наименование | Глобальная навигационная спутниковая система | Global positioning system Navigational satellite providing time and range |
| параметр | Глонасс | GPS NAVSTAR |
| разработка | 1970, 1-й ИСЗ -1982г, сейчас 20 ИСЗ (4 выведены из зоны) полное развертывание 2009г | 1973, полностью развернуто 1995г |
| Количество ИСЗ | 24 ИСЗ на 3х орбитах | 24 на 6 орбитах |
| Баллистическая структура | 
| 
|
| Параметры орбит:форма | круговая | круговая |
| Угол наклона | 64,8 | 55 |
| Высота(км) | 18840-19940 | 20200 |
| Период обращения | 11ч15м | 12ч |
| Частотный план | Каждый спутник работает на 2х частотах | Все спутники работают на 2х одинаковых частотах
|
| Передаваемая информация | ||
| -вид сигнала | Шумоподобный | |
| -вид информации | -специальная- необходима для ОМС -навигационная-для изм Нп | |
| - вид канала | Грубый(для всех) С/А Точный(для военных) Р | |
| -формат спец информации | Делится - оперативную (передается каждые 30сек, и меняется каждые 30 мин) Включает:-метки времени, -текущее время с дискретом 30 сек, -сдвиг шкалы времени спутника от шкалы системы, -сдвиг шкалы времени системы от эталона, -величина отклонения частоты ИСЗ от номинала, -эфемириды ИСЗ, позволяют вычислить будущее положение спутника - неоперативная (передается каждые 2,5 мин)Включает: - дата закладки альмонаха,- число дней прошедших с начала високосного года, - номера рабочих спутников и литерные номера их несущих частот, - параметры положения ИСЗ на орбитах, - пригодность спутников для использования | Передается субкадрами на частоте 1,6ГГц
 Оперативная инфа каждые 30 сек,
Неоперативная 12,5 мин
Оперативная инфа каждые 30 сек,
Неоперативная 12,5 мин
|
| параметр | Глонасс | GPS NAVSTAR |
| С.к. | SGS-90 | WGS-84 |
| шкала времени | UTC (SU) | UTC(USNO) расхождение несколько мкс |
| Погрешности системы | Погрешности взаимной синхронизации ИСЗ, погрешности эфимирид, ионосферная погрешность, тропосферная погрешность, инструментальная погрешность АПИ, намеренно вводимая погрешность, погрешность многолучевости | |
 2.7. Точностные характеристики и
2.7. Точностные характеристики и
навигационное использование СРНС «НАВСТАР», «ГЛОНАСС»
градиент квазидальности можно разделить на горизонтальную и вертикальную составляющую. Горизонтальная нужна для позиционирования на поверхности Земли, а вертикальная важна для определения высоты.
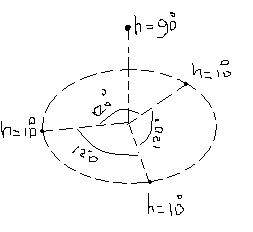 Исходя из этого оптимальное расположение спутников
Исходя из этого оптимальное расположение спутников
Разность азимутов 120
-геометрический фактор горизонтальной плоскости. Для оптимального созвездия Г=2. Реальные созвездия могут быть хуже оптимального, в среднем равен 4.
Погрешность измерения ПУ существенно возрастает при уменьшении путевой скорости судна. Очевидно что точностные характеристики определения системами Vп и ПУс не удовлетворяет требованиям практики. Поэтому в АПИ применяется спец сглаживающие алгоритмы определения m пу учитывающие прошлые положения судна.
Способы уменьшения погрешности: 1) увелечение времени осреднения. Стандартное время осреднения 10 сек. При увеличении tоср до 100сек погрешности уменьшаются в 3 раза. 2) организация совместного использования ГЛОНАСС и GPS NAVSTAR. При совместном использовании СКП ОМС 35 м и 100% покрытие надежность и доступность,но рассогласование шкал системного времени. 3) дифф подсистемы.DGPS, ДГЛОНАСС. Идея дифференциального метода заключается в том что наземным контрольным пунктом (КП) с точно известными коо-ми произв., измер-я нав пар-ов и рассч., φ,λ изм. В результате рассогласование.
Эти рассогласования объясняются погрешностями измерения. Коррелированные погрешности можно искл., поскольку в течении достаточно продолж., времени они не изменяются, т.е. носят систематический характер: погрешности эфимирид, рассогласование шкал времени, на условие распространения радиоволн, квазислучайная намеренно вводимая погрешность. Для искл., коррелиров., погр., потребителям передаются:
| Р-н плавания | Точность ОМС (Р=95%) | Дискретность обновления коо-т | Доступность системы | Целостность системы | Предупреждение о нарушении целостности | |
| Стесн воды, воды с инт движ судов,высокий риск, прибрежные воды | 10м | 10 сек или 2 сек при использовании АИС | 99,8% в течении 2х лет | 99,97% в течении 3х часов | 10с | |
| Стесн. Прибрежн воды с малой интенсивностью и невысоким риском | 10м |
| 99,5% в течении 2х лет | 99,85% в течении 3х часов | 10с | |
| Открытое море | 100м |
| 99,8% в течении 30 сут | Не нормируется | Как можно быстрее | |
Кроме потребителю передаются: - координаты КП, инфа о сотоянии ИСЗ, - альманах КП.
По методу базирования и способу передачи поправок 2 типа: - наземный(на базе морских РМК), космический (на базе ИСЗ). Использование поправок повышает точность ОМС до 3-5м. точность выше, чем ближе к КП
Эксплуатационные требования к всемирной радионавигационной системе:GNSS. ГЛОНАСС и GPS NAVSTAR являются компонентами. Требования GNSS определены резолюцией ИМО А953(2)
Эта резолюция формально отменила требования резолюции А529
При использовании GNSS следуем 10-100 но при отсутствии сигнала мы обязаны применять критерии резолюции А529.
Особенности использования судовых ПИ. Для эффективного использования: - как осуществляется выбор созвездий, как осуществляется смена созвездий, что происходит при потере созвездия, с какими координатными системами может работать прибор. Индикация координат должна быть в той же геодезической системе что и МНК.








