 2020-05-21
2020-05-21 102
102по дисциплине: «Искусственные нейронные сети и нечеткая логика в задачах контроля и управления»
на тему: «Синтез нечетких алгоритмов управления на основе метода векторных
функций Ляпунова»
Выполнил: студент группы 78-61
ФИО
Проверил: к.т.н., доцент кафедры АИТ
Горшкова К. Л.
Альметьевск, 2020
Цель работы:
- изучение метода синтеза систем управления типа Такаги-Сугено с формированием нечеткого логического регулятора с применением метода векторных функций;
- рассмотреть системы управления общего вида, линейные и нелинейные системы;
- исследование системы автоматического регулирования с нечетким регулятором.
Краткие теоретические сведения:
Предлагается метод синтеза нелинейных систем управления с запаздыванием типа Такаги-Сугено с формированием нечеткого логического регулятора. В отличие от других работ рассматриваемый подход эффективно использует метод векторных функций Ляпунова (ВФЛ). Метод векторных функций Ляпунова (ВФЛ) является точным и эффективным методом исследования систем управления. Нечеткая логическая система состоит из динамического процесса и нечеткого логического регулятора. Пусть  . Система управления характеризуется как нелинейная система с несколькими входами, моделируемой системой:
. Система управления характеризуется как нелинейная система с несколькими входами, моделируемой системой:

 - вектор состояния;
- вектор состояния;
 - нелинейный вектор,
- нелинейный вектор,  - матрица с нелинейными элементами, описывающие динамику системы управления; u - управление, полученное дефазификацией методом центров тяжести для T – S систем. FLC состоит из r нечетких IF −THEN правил. Правило в T – S системе записывается в виде:
- матрица с нелинейными элементами, описывающие динамику системы управления; u - управление, полученное дефазификацией методом центров тяжести для T – S систем. FLC состоит из r нечетких IF −THEN правил. Правило в T – S системе записывается в виде:

где  нечеткие множества, u = ui(x) -управление, определяемое i −м правилом.
нечеткие множества, u = ui(x) -управление, определяемое i −м правилом.
Каждое нечеткое правило генерирует  согласно
согласно  функции принадлежности.
функции принадлежности.
Управление u, которое должно быть применено в процессе, является функцией  и
и  . Выход FLC задается
. Выход FLC задается  .
.
Задание:
1. Изучить создание системы управления общего вида, линейной системы, нелинейной системы.
2. Разработать собственную систему управления линейную и нелинейную.
Выполнение работы:
Рассматривается линейное звено – интегратор:
x' = u
Функция V(X), непрерывно дифференцируемая в некоторой окрестности U начала координат, называется функцией Ляпунова автономной системы:
 ,
,
если выполнены следующие условия:
1. V(X)>0 для всех XÎU\{0};
2. V(0)= 0;
3. dV/dt≤0 для всех XÎU.
В данном случае выбрана функция Ляпунова V = 0.5x2. Производная функции Ляпунова dV/ dt = xdx/ dt = xu. Чтобы система была устойчивой, производная должна быть отрицательно полуопределенной, то есть xu ≤ –W, где W – некоторая положительная функция, которая принимает значение 0 при х = 0. В качестве W удобно выбирать сумму квадратов вектора состояния: W = kx2, k > 0. Отсюда
xu ≤ – kx2,
u = – kx.
Таким образом без больших затрат получено управление для линейного звена. При увеличении коэффициента k уменьшается величина времени регулирования и увеличивается модуль управляющего сигнала.
Настроим fuzzy- регулятор по алгоритму Такаги-Сугено:
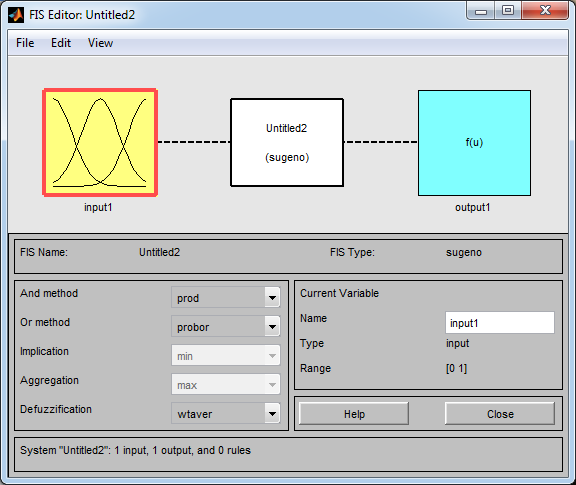
Рисунок 1 – Рабочее окно FIS Editor

Рисунок 2 – Функции принадлежности входной переменной

Рисунок 3 – Функции принадлежности выходной переменной
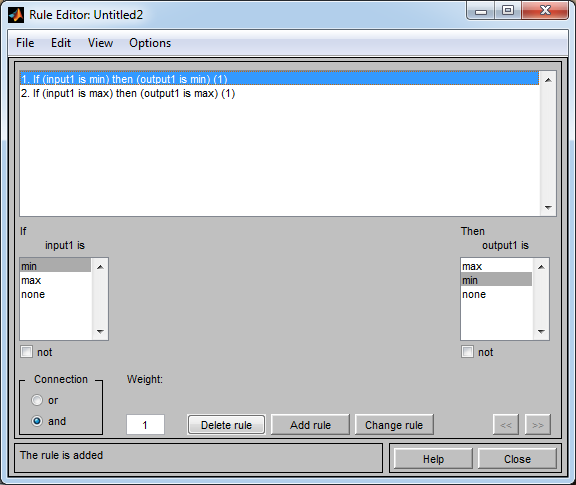
Рисунок 4 – Набор правил

Рисунок 5 – Передаточная характеристика регулятора
Реализуем собственную линейную систему управления с нечетким регулятором:

Рисунок 6 – Реализация линейной системы управления

Рисунок 7 – Переходный процесс линейной системы управления
Реализуем нелинейную систему управления с нечетким регулятором. Нелинейная система отличается от линейной тем, что содержит хотя бы одно звено, описываемое нелинейным уравнением. В данной схеме в качестве нелинейного элемента представлен блок Dead Zone:

Рисунок 8– Реализация нелинейной системы управления

Рисунок 9 – Переходный процесс нелинейной системы управления
Вывод: в ходе выполнения данной работы была разработана собственная система управления линейная и нелинейная. При выполнении был изучен метод синтеза систем управления типа Такаги-Сугено с формированием нечеткого логического регулятора с применением метода функций Ляпунова.








