 2020-05-25
2020-05-25 401
401Содержание
1. Исходные данные: 3
2. Выбор и обоснование метода контроля. 3
4. Выбор материала и размеров ПЭП.. 5
5. Выбор размеров ПЭП.. 6
6. Расчет частоты следования зондирующих импульсов. 7
7.Сканирование при УЗК. Время контроля. 7
8. Определение материала демпфера ПЭП.. 9
9. Динамический диапазон входных сигналов от заданного дефекта. 10
10. Временная регулировка чувствительности (ВРЧ) 11
11. Динамический диапазон входных сигналов при наличии ВРЧ(требования к усилителю) 12
12. Коэффициентусиленияприемноготракта. 13
13. Полоса пропускания приемного тракта. 13
14. Функциональная схема системы автоматизированного контроля. 17
Список литературы: 18
1. Исходные данные:
Задача: сконструировать автоматизированный компьютерный комплекс для реализации неразрушающего контроля листового проката.
Толщина листа – 50мм;
Ширина листа – 3600 мм;
Длина листа – 20000 мм
Мертвая зона – 10мм;
Время контроля – погонный метр в секунду;
Чувствительность – плоскодонный отражатель диаметром 5 мм;
Размер зерна D = 0,15 мм.
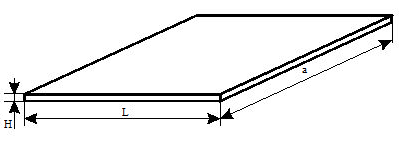
Рисунок 1 – Схематичное изображение объекта контроля
Выбор и обоснование метода контроля
Для контроля изделия целесообразно применить эхо-метод, т.к. он обладает высокой чувствительностью к плоскостным дефектам, а также позволяет определить координаты дефектов.
Так как поверхность необработанная, горячая и требуется высокая скорость контроля, целесообразно применить иммерсионный способ ввода с погружением объекта контроля в воду, для того чтобы уменьшить срок износа преобразователей.
2.1 Расчёт минимальной толщины слоя иммерсионной жидкости:
Н = 50 мм; 
Выбор оптимальной рабочей частоты
Как правило, оптимальной рабочей частоте соответствует максимум эхо-сигнала от дефекта.
При контроле эхо-методом уравнение акустического тракта имеет вид:
С учетом этой формулы получим:

где f – частота преобразователя в МГц
D – средний размер зерна в металле
А=0,12; В=20 (для продольных волн) - постоянные коэффициенты
N=1 – коэффициент не зависящий от частоты
H – глубина залегания дефекта
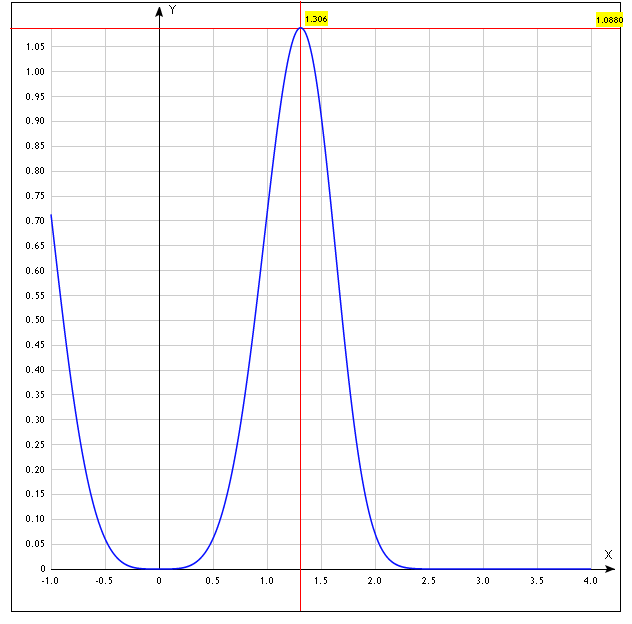
Рисунок 2 – Зависимость амплитуды сигнала от частоты
Частота на графике приведена в МГц. По графику определяем оптимальную частоту 1,3 МГц.








