 2020-06-29
2020-06-29 693
693УДК 622.14
В.А. ГОЛОВАНОВ
Санкт-Петербургский горный ин-т, Россия
ЭХОЛОКАТОРЫ ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ ВЗРЫВНЫХ СКВАЖИН
В горнорудной промышленности наиболее распространенными и высокопроизводительными способами отбойки руды являются буровзрывные работы с использованием глубоких взрывных скважин. При годовой производительности современного подземного рудника 1 млн. т и среднем выходе руды 8 т/м объем бурения взрывных скважин может составить несколько сотен километров. Своевременное и точное их измерение позволяет оперативно выявить допущенные нарушения (недобур, перебур), что снижает потери и разубоживание полезного ископаемого.
До середины 70-х годов, т.е. до появления эхолокационных приборов, существовали малопроизводительные и трудоемкие способы измерения глубины скважин: жезловый, пневматический и механический. Из-за этого маркшейдерская служба была не в состоянии осуществить замер всех скважин, поэтому он производился выборочно, а состояние стенок скважин перед зарядкой ВВ вообще не проверялось. Из-за этого зарядка и отбойка скважин осуществлялась с большими отклонениями от проекта. Например, по данным контрольных замеров на одном из железорудных месторождений Урала, максимальное отклонение длины скважин от проектной достигало 4,6 м [3], а на руднике «Молибден» Тырныаузского ВМК недобур отдельных скважин составлял 6-8 м [1]. Контроль объема ВВ, подаваемого в скважину, обычно отсутствовал, вследствие чего скважины заряжались не полностью. Все это являлось причиной сверхнормативных потерь и разубоживания, увеличению выхода негабаритов.
Решение вопроса контроля взрывных скважин потребовало разработки новых методов контроля глубины взрывных скважин, работы, по созданию которых начались в 1974 г. на кафедре маркшейдерского дела СПГГИ (ЛГИ) под руководством доц. Л.Н. Руднева. Уже в 1974-77 г.г. был разработан и изготовлен первый отечественный эхолокатор «Пульсар»[1]. Принцип действия эхолокатора был основан на измерении временного интервала между излученным и отраженным от конце скважины сигналами.
Измеряемые эхолокатором интервалы времени пропорциональны расстоянию локации, если скорость звука постоянна. Скорость звука в волноводе круглого сечения d, каким является скважина, не зависит от его геометрических характеристик при длине звуковой волны l>0,82d. На низких частотах при соотношении диаметра скважины и длины звуковой волны d/l<0,3 возможно измерение длин как закрытых, так и открытых скважин.
В «Пульсаре» был применен индикатор проблескового типа. Сущность его работы заключается в следующем. Электродвигатель, питаемый от аккумуляторной батареи, вращает с постоянной строго заданной скоростью диск, на котором расположен безынерционный источник света – светодиод. Над диском установлена прозрачная круговая шкала с делениями. В тот момент, когда светодиод проходит под нулевым делением шкалы, контакт на валу диска включает генератор, и излучатель посылает в скважину звуковой импульс. Сигнал с генератора подается не только на излучатель, но и на светодиод, который вспышкой указывает фактическое положение начала отсчета на шкале. Отраженный сигнал, который поступает на приемник и затем через электронный усилитель на светодиод, тоже вызывает его вспышку, а поскольку за время от посылки до приема сигнала диск повернется на некоторый угол, местоположение вспышки на шкале, покажет измеряемое расстояния. Вследствие того, что посылка и световые вспышки воспринимаются наблюдателем как непрерывное свечение, под соответствующими делениями шкалы, по которым и производится отсчет измеряемого расстояния.
Интервал времени Т между посылкой и приемом зависит, помимо расстояния, от скорости распространения звука [1]:
Т=2l0/C
где l0 - измеряемое расстояние, которое звук проходит дважды – туда и обратно; С - скорость звука.
Угол поворота j диска со светодиодом определяется при этом скоростью вращения W:
j = WТ,
откуда следует, что отсчет на круговой шкалет
l =  =
=  l0,
l0,
где L - цена полного оборота (предел измерения).
Соответствие отсчета измеряемому расстоянию определяется, таким образом, равенством LW¤pС = 1. Любое изменение скорости вращения вызывает пропорциональную ей относительную ошибку измерения. Стабилизация скорости вращения может осуществляться за счет применения специального микроэлектродвигателя с центробежным регулятором.
Вопросы распространения и отражения звука в скважинах не были в достаточной мере исследованы к моменту разработки эхолокатора «Пульсар», поэтому выбор частоты производился на основе лабораторных и натурных экспериментов. Было установлено, что ослабление сигналов в скважинах определяется не затуханием звука в воздухе, а его рассеянием на неровностях стенок и поэтому зависит от состояния стволов скважин. Наиболее сильно звук затухает в скважинах, где имеется слой породной крошки. По результатам проведенных опытов для экспериментальных образцов эхолокатора были выбраны рабочие частоты 1 и 2 кГц, как наиболее отвечающие условиям измерений в скважинах диаметров 65-105 мм. На этих же частотах допустимо измерение скважин и других диаметров (см. технические характеристики), однако за счет применения набора частот, соответствующих диаметрам скважин.
Распространяясь по скважине, звук отражается не только от забоя, но и от различных нарушений в стволе. Поскольку нарушения расположены ближе к приемоизлучателю, сигнал от них затухает меньше, чем сигнал от забоя, и может мешать измерению глубины скважины. С целью компенсации затухания в эхолокаторе была предусмотрена автоматическая регулировка усиления, обеспечивающая большую чувствительность приема дальних сигналов, чем ближних.
При измерении глубины скважин сигналы от нарушения являются помехами, однако они дают информацию о состоянии ствола, которая тоже может быть полезной. Необходимо отметить и тот факт, что в определенных условиях звук отражается открытым концом скважины так же хорошо, как и глухого забоя. Это позволяет применять метод эхолокации для измерения длины скважин, выбитых в очистное пространство.
Таблица 1
Технические характеристики эхолотов для измерения длины скважин
| Показатель | Пульсар | Пульсар-2 | Рифей-2 | Без назв. | ЭПОС | ГСА-60 |
| Глубина (L) измеряемых скважин, м | 4-60 | 3-49,.9 | 3-30 | 3-60 | 4-60 | 4-99,9 |
| Диаметр измеряемых скважин, мм | 60-220 | 50-220 | 50-220 | 60-200 | 80-250 | 50-250 |
| Погрешность измерения | ±1,5 % | ±0,25 м | ±0,3 м | ±1 % | ±0,015L | ±0,3 м |
| Время замера, с | 8-30 | 8-10 | 5 | 7 | 2 | 1 |
| Габариты, мм | 250´250´ 100 | 320´262´ 116 | 152´126´ 65 | 196´106´ 40 | 190´150´ 70 | 290´175´ 70 |
| Масса, кг | 6,5 | 5,4 | 2,4 | 2,0 | 4,0 | 2,6 |
| Способ индикации | Круговой индика-тор | Матрич-ный индикатор | Цифро-вое табло | Цифро-вое табло | Цифро-вое табло | Цифро-вое табло |
| Рабочая частота, кГц | 1-2 | 0,6 и 1,2 | 1 | 1 | 1 | 1 |
| Изготовитель Год | СПГГИ 1976 | СПГГИ 1984 | Цветмет-автомтика, 1980 | Нальчик 1982 | ГИГХС 1977 | ГИГХС 1989 |
Практика эксплуатации эхолокатора «Пульсар» показала, что импульсный звуковой метод является эффективным для создания серийных маркшейдерских приборов для контроля глубины скважин. Это послужило началом для разработки и производства на других предприятиях целого ряда эхолокаторов для измерения глубины скважин (табл. 1).
Производственные испытания «Пульсара» выявили и слабые места прибора. В основном они касались системы, основанной на круговом индикаторе. Он обладал недостаточной надежностью, обусловленной применением механической развертки, сложностью регулировки и стабилизации частоты вращения приводного электродвигателя, имел ограниченную точность измерений из-за невозможности увеличения масштаба отсчетной шкалы индикатора дальности. Кроме этого при промышленном освоении этого прибора возникли трудности при обеспечении требуемого класса точности изготовления подвижных кинематических звеньев индикатора дальности. Поэтому в новом эхолокаторе «Пульсар-2» (1984 г.) была использована схема электронного проблескового индикатора на матрице светоизлучающих элементов [2, 5] взамен электромеханического.
Схема прибора содержит следующие функциональные узлы: генератор тактовых импульсов, блок совпадения, генератор зондирующих импульсов, электроакустический преобразователь (ЭАП), усилитель с каскадом временной автоматической регулировки усиления (ВАРУ) и проблесковый индикатор, включающий матрицу светоизлучающих элементов и дешифраторы столбцов и строк с соответствующими десятичными счетчиками.
При включении прибора от источника питания подается напряжение и генератор тактовых импульсов начинает непрерывно выдавать импульсы заданной частоты на вход первого десятичного счетчика, выход которого соединен с входом дешифратора столбцов матрицы светоизлучающих элементов. Одновременно блок совпадения осуществляет запуск генератора зондирующих импульсов, от которого на электроакустический преобразователь поступает зондирующий электрический импульс. Последний преобразуется в акустический сигнал и, распространяясь по стволу скважины, отражается от препятствий (вывалов, геологических нарушений) и от забоя скважины. Одновременно в пределах цикла одного измерения первый дешифратор последовательно подключает столбцы матрицы к выходу линейного усилителя. Каждый десятый тактовый импульс с выхода десятичного счетчика дешифратора столбцов поступает на вход счетчика дешифратора строк. Дешифратор строк при этом поочередно включает строки матрицы. В точках пересечения столбцов и строк установлены светоизлучающие элементы (светодиоды), которые загораются при одновременном включении соответствующего столбца и строки при подаче на матрицу питающего напряжения с выхода линейного усилителя в момент приема отраженного импульса. Таким образом дешифраторы, производя последовательное включение элементов матрицы, осуществляют временную развертку, а вспышка того или иного светодиода указывает, в какой момент времени от начала развертки получен отраженный сигнал с линейного усилителя. Отсчет единиц метров измерения производится по столбцам, а отсчет десятков – по строкам. При переходе десятичных счетчиков через нулевое состояние схема совпадения производит очередной запуск генератора зондирующих импульсов, начинается очередной цикл измерений – распространение акустического импульса в стволе скважины и временная развертка на матрице. Отраженные эхосигналы преобразуются электроакустическим преобразователем в электрические, которые усиливаются линейным усилителем и подаются на матрицу. Напряжение, которое подается на матрицу в момент приема отраженного импульса, будет пропорционально его интенсивности и, следовательно, яркость свечения светодиодов будет различной.
Кроме того, подача на матрицу напряжения в момент приема отраженного импульса вызовет свечение того светодиода, расположение которого на отсчетной шкале матрицы соответствует расстоянию до препятствия. Всего на матрице могут одновременно светиться столько диодов, сколько получено отраженных импульсов после посылки в скважину зондирующего импульса.
Благодаря использованию линейного усилителя можно по яркости свечения светодиодов оценить относительную величину нарушений-вывалов и выделить основной сигнал от забоя скважины. С этой же целью в схему введен каскад временной автоматической регулировки усиления (ВАРУ), который компенсирует ослабление сигналов на дальних дистанциях, вызванное ослаблением звука. Каскад ВАРУ обеспечивает постепенное возрастание коэффициента передачи линейного усилителя от минимального в момент посылки зондирующего импульса до максимального – в момент приема отраженного сигнала с наибольшего измеряемого расстояния.
Следует отметить, что у всех эхолокаторов минимальное измеряемое расстояние составляет около 3-х метров (табл. 1). Это связано с тем, что время паузы от момента излучения затухающего колебания до начала возможного прихода отраженного импульса (мертвая зона) равно 8 мс, что соответствует этому расстоянию.
 Конструктивно эхолокатор «Пульсар-2» был выполнен в виде двух блоков: устройство измерительное и преобразователь акустический. Устройство измерительное представляет собой блок, состоящий из индикатора и двух плат с печатным монтажом. Оно помещается в металлический корпус, в котором в транспортном положении размещается и электроакустический преобразователь с кабелем.
Конструктивно эхолокатор «Пульсар-2» был выполнен в виде двух блоков: устройство измерительное и преобразователь акустический. Устройство измерительное представляет собой блок, состоящий из индикатора и двух плат с печатным монтажом. Оно помещается в металлический корпус, в котором в транспортном положении размещается и электроакустический преобразователь с кабелем.
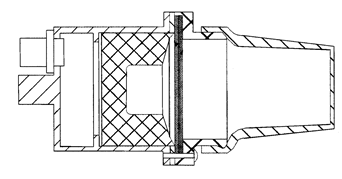
Преобразователь акустический (рис.1) состоит из корпуса и патрубка. Корпус 1 крепится с корпусом 2 с помощью винтов. Между корпусами в месте соединения вставлена резиновая прокладка 3, металлическая сетка 4, прокладка из полиэтиленовой пленки или водонепроницаемой ткани, защищающие динамическую головку громкоговорителя от внешних воздействий. Полость между головкой громкоговорителя и корпусом 2 заполнена звукопоглощающим материалом 9. На торце корпуса имеется штепсельный разъем для соединительного кабеля. В центре торца имеется глухое отверстие с резьбой для крепления штанги. На корпус 1 насаживается резиновый патрубок 11.
По данным исследований Коваленко А.И. [3], допустимая погрешность измерения глубины скважин составляет ±0,3 м. При первых испытаниях эхолокаторов их показания контролировались с помощью складных мерных реек. Материалы обработки 140 скважин [1] свидетельствуют, что среднеквадратическая погрешность измерения их длины составила ±0,26 м, при средней глубине скважины 22 м. Следует заметить, что контроль мерными рейками является грубым (по-видимому, за счет непрямолинейного расположения реек в скважине). При повторных измерениях одних и тех же скважин имели место расхождения до 0,8 м.
Важное значения для приборов такого типа имеет разрешающая способность по площади отражения. Такие исследования выполнялись на 10-метровой трубе диаметром 70 мм. На расстоянии 6 м от излучателя проделывалась прорезь для введения в трубу заглушки. Проводилась калибровка прибора и установка ВАРУ. Затем в прорезь опускалась заглушка до тех пор, пока расстояние до нее не фиксировалось эхолокатором. Для данного положения заглушки определялась площадь перекрытия. После этого продолжалось перекрытие сечения трубы до момента, пока не исчезал сигнал от забоя. При этом определялась наибольшая площадь перекрытия, при которой невозможно одновременно фиксировать забой и заглушку (вывал).
Все измерения проводились на 2-х частотах при минимальном, среднем и максимальном усилении. Результаты этих испытаний представлены в табл. 2.
Таблица 2
Определение разрешающей способности эхолокатора по площади
| Частота, кГц | Усиление | Фиксируемая площадь перекрытия, см² | Фиксируемая относительная площадь перекрытия, % |
| 0,8 | Минимальное Среднее Максимальное | 30,4 10,8 2,4 | 79 28 6 |
| 1,6 | Минимальное Среднее Максимальное | 26,1 6,8 4,2 | 67 18 11 |
Из таблицы 2 видно, что наименьший по площади отражения объект, который может быть зафиксирован прибором, перекрывает сечение трубы на 6-10 %. Это позволяет определить даже незначительные вывалы и различные перекрытия ствола скважины.
При внедрении того или иного прибора неизменно встает вопрос об эффективности его применения. Опыт многолетнего использования эхолокаторов для измерения глубины скважин на различных предприятиях позволяет с уверенностью сказать – их применение дает высокую эффективность. Внедрение акустического метода контроля взрывных скважин повысило производительность данного вида маркшейдерских работ в 15 раз, обеспечив контрольный замер скважин в полном объеме и, как следствие, привело к резкому уменьшению недобуров скважин [4].
В настоящее время дальнейшие исследования по созданию и модернизации эхолокаторов не ведутся, хотя потребность в них неуклонно возрастает. На современной элементной базе можно разработать миниатюрные и надежные приборы, которые бы полностью решили проблему контроля взрывных скважин. Остается нерешенной также задача измерения глубины нисходящих вертикальных и наклонных скважин, заполненных водой. Такая ситуация часто возникает на открытых разработках.








