 2020-07-01
2020-07-01 828
828МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«УЛЬЯНОВСКИЙ ИНСТИТУТ ГРАЖДАНСКОЙ АВИАЦИИ
ИМЕНИ ГЛАВНОГО МАРШАЛА АВИАЦИИ Б. П. БУГАЕВА»
РАДИООБОРУДОВАНИЕ ВОЗДУШНЫХ СУДОВ
И ЕГО ЛЕТНАЯ ЭКСПЛУАТАЦИЯ
НАВИГАЦИОННОЕ РАДИООБОРУДОВАНИЕ
Рекомендовано
редакционно-издательским советом института
Ульяновск 2018
УДК 629.735.05:621.396.9(075.8)
ББК 561я7+О571я
Р15
Радиооборудование воздушных судов и его летная эксплуатация. Навигационное радиооборудование: лабораторный практикум / сост. А. В. Ефимов, О. В. Максимова. – Ульяновск: УИ ГА, 2018. – 61 с.
Содержит основные теоретические сведения, описание принципов работы, основы эксплуатации автоматических радиокомпасов АРК-15М, KR 87, Becker 3502, радиовысотомеров РВ-5, РВ-5М (А-037), доплеровских измерителей ДИСС-Ш013В, ДИСС-016, а также порядок выполнения лабораторных работ, контрольные вопросы и требования к отчету.
Разработан в соответствии с Федеральным государственным образовательным стандартом и рабочей программой учебной дисциплины «Радиооборудование воздушных судов и его летная эксплуатация».
Предназначен для курсантов и студентов заочной формы обучения специальности «Эксплуатация воздушных судов и организация воздушного движения» специализации 01. Организация летной работы, курсантов направления подготовки «Аэронавигация» профиля 1. Летная эксплуатация гражданских воздушных судов.
УДК 629.735.33:621.396.6(075.8)
ББК 561я7
Оглавление
Список сокращений. 3
Лабораторная работа № 1. Автоматические радиокомпасы
АРК-15М, KR 87, Becker 3502. 5
Лабораторная работа № 2. Радиовысотомеры РВ-5, РВ-5М (А-037). 27
Лабораторная работа № 3. Доплеровские измерители скорости
и угла сноса ДИСС-Ш013В, ДИСС-016. 44
Методические указания по выполнению лабораторных работ. 57
| |
имени Главного маршала авиации Б. П. Бугаева», 2018
Список сокращений
АО амплитудный ограничитель
АПЧ автоматическая подстройка частоты
АРК автоматический радиокомпас
АРУ автоматическая регулировка усиления
БИ блок индикации
БПРМ ближний приводной радиомаяк
ВПП взлетно-посадочная полоса
ВПР высота принятия решения
ВС воздушное судно
ВУ вычислительное устройство
ГВЧ генератор высокой частоты
ГКМВ гектометровые волны
ГНЧ генератор низкой частоты
ДВ длинные волны
ДИСС доплеровский измеритель путевой скорости и угла сноса
ДНА диаграмма направленности антенны
ДПРМ дальний приводной радиомаяк
И индикатор
ИКВСП информационный комплекс высотно-скоростных параметров
ИЧ измеритель частот
КМВ километровые волны
КС курсовая система
КУР курсовой угол радиостанции
МПР магнитный пеленг радиостанции
МПС магнитный пеленг самолета
МСРП магнитная система регистрации параметров (полета)
ОРК отсчет радиокомпаса
ОСП оборудование системы посадки
ПМ периодомер
ПРМ приемник
ПРС приводная радиостанция
ПУ пульт управления
РВ радиовысотомер
САУ система автоматического управления
СВ средние волны
СВС система воздушных сигналов
СВЧ сверхвысокие частоты
СИВ система имитации видимости
СМ смеситель
СПС система предупреждения столкновений самолетов в воздухе
СПУ самолетное переговорное устройство
СРППЗ система раннего предупреждения приближения земли
СУ суммирующее устройство
СЧ счетчик (импульсов)
СЭИ система электронной индикации
УВ указатель высоты
УПЗ устройство поиска и захвата
УПТ усилитель постоянного тока
УПФ узкополосный фильтр
УРЧ усилитель разностной частоты
ЦВМ цифровая вычислительная машина (бортовая)
ЧД частотный детектор
ЧМ частотный модулятор
ADF Automatic Direction Finder – автоматический радиокомпас
BFO Beat Frequency Oscillator – режим АРК приема телеграфных сигналов А1А
HDG Heading – курс
ND Navigation Display – плановый навигационный индикатор (дисплей)
NDB Nondirectional Radio Beacon – ненаправленный радиомаяк (приводной радиомаяк)
RMI Radio Magnetic Indicator – радиомагнитный индикатор
TAWS Terrain Awareness and Warning System – система раннего предупреждения приближения к земле
TCAS Traffic Alert and Collision Avoidance – система отображения воздушной обстановки и предотвращения столкновений самолетов в воздухе
Лабораторная работа № 1.
Автоматические радиокомпасы АРК-15М, KR 87, Becker 3502
Целью работы является изучение возможностей, назначения, принципов функционирования, особенностей схемотехнического построения автоматических радиокомпасов АРК-15М, KR 87, Becker 3502 и приобретение практических навыков по их включению, проверке работоспособности и летной эксплуатации.
Общие положения
АРК (ADF) предназначены для самолетовождения по ПРС (NDB) и захода на посадку по ОСП. Непрерывно и автоматически определяя КУР (угол между продольной осью ВС и направлением на радиостанцию), позволяют решать следующие навигационные задачи:
– совершать полет на радиостанцию и от нее с визуальной индикацией КУР (МПР, МПС);
– производить предпосадочное маневрирование по приводным радиомаякам и заход на посадку по системе ОСП;
– прослушивать позывные сигналы радиостанций в диапазоне ГКМВ (СВ) и КМВ (ДВ), а также на частоте ДПРМ прослушивать информацию авиадиспетчера при потере радиосвязи;
– определять местоположение ВС угломерным методом.
АРК дает возможность производить пеленгование и прослушивание широковещательных (коммерческих) радиостанций, работающих в диапазонах ГКМВ (СВ) и КМВ (ДВ).
Принцип работы
Основным элементом АРК для определения направления на радиостанцию является направленная рамочная антенна. В простейшем случае рамочная антенна представляет тонкий проводник, имеющий форму замкнутой плоской фигуры (прямоугольника, окружности, ромба, эллипса).
При рассмотрении основных свойств рамочной антенны предполагают, что плоскость рамки вертикальная, а направление распространения электромагнитных колебаний составляет с плоскостью рамки угол q (рис. 1.1).
Электрическая составляющая ЭМП описывается выражением
 .
.
 Электродвижущая сила (ЭДС), наводимая в рамочной антенне u ЭМП согласно закону электромагнитной индукции пропорциональна скорости изменения магнитного потока в единицу времени и определяется выражением
Электродвижущая сила (ЭДС), наводимая в рамочной антенне u ЭМП согласно закону электромагнитной индукции пропорциональна скорости изменения магнитного потока в единицу времени и определяется выражением
где h = Um/Em – действующая высота рамочной антенны.
Для многовитковой рамки с ферромагнитным сердечником  , где m – магнитная проницаемость сердечника, S – площадь рамки, N – число витков, l – длина волны ЭМП.
, где m – магнитная проницаемость сердечника, S – площадь рамки, N – число витков, l – длина волны ЭМП.
Так как ЭДС um рамочной антенны в зависимости от направления приема (угла q) изменяется по косинусоидальному закону, ее диаграмма направленности, показанная на рис. 1.1, имеет форму восьмерки и обладает следующими свойствами:
1. В направлениях, совпадающих с плоскостью рамки (q = 0° и 180°), амплитуды ЭДС рамки максимальны и противофазны (cos0° = 1; cos180° = –1), а в направлениях, перпендикулярных плоскости рамки (q = 90° и 270°), – равны нулю (cos90° = 0 и cos270° = 0).
2. Фаза ЭДС рамки сдвинута на 90° относительно фазы возбуждающего ее электромагнитного поля (cos x = sin (p/2 + x).
3. При переходе через «нулевой» прием фаза ЭДС рамки изменяется на 180° (cos(p + x) = –cos x).
На рис. 1.2 приведена схема АРК, иллюстрирующая принцип его работы.
Рамочная антенна 1, нагружена на управляющую обмотку 2, двигателя 3, на оси которого закреплена рамка и индикатор КУР 4, В рамочной антенне наводится ЭДС, фаза и величина которой зависит, как показано ранее, от ориентации рамки относительно источника излучения.
 Для определения фазовых отличий сигнала рамки в лепестках ДНА необходим опорный сигнал, для чего используют ненаправленную антенну 5, имеющую круговую диаграмму направленности. Фаза ЭДС такой антенны совпадает с фазой возбуждающего ее электромагнитного поля и сдвинута на 90° относительно фазы ЭДС рамки. Ненаправленная антенна подключена к обмотке возбуждения 6 двигателя.
Для определения фазовых отличий сигнала рамки в лепестках ДНА необходим опорный сигнал, для чего используют ненаправленную антенну 5, имеющую круговую диаграмму направленности. Фаза ЭДС такой антенны совпадает с фазой возбуждающего ее электромагнитного поля и сдвинута на 90° относительно фазы ЭДС рамки. Ненаправленная антенна подключена к обмотке возбуждения 6 двигателя.
Под действием ЭДС антенн в обмотках двигателя 3 протекают токи i 1, i 2, которые создают синфазные магнитные потоки Ф1, Ф2. Если плоскость рамки перпендикулярна направлению приема, то ЭДС в рамочной антенне равна нулю, ток и магнитный поток отсутствуют, двигатель не вращается. В противном случае в зависимости от стороны приема в рамке наводится ЭДС соответствующей фазы и амплитуды. Результирующий вектор Фр, как результат сложения векторов Ф1 и Ф2 заставляет двигатель вращаться в ту или иную сторону в зависимости от опережения или отставания на 90° фазы ЭДС рамочной антенны относительно ненаправленной (приеме сигнала на один или другой лепесток ДНА), поворачивая рамку и стрелку по кратчайшему пути до тех пор, пока ЭДС в рамке станет равна нулю. Устойчивым является одно из двух нулевых значений ЭДС рамки, поэтому КУР измеряется однозначно и автоматически.
В современных АРК рамочная антенна неподвижна, а роль вращающейся рамки выполняет роторная (искательная) катушка гониометра. Гониометр (измеритель угла), по конструкции напоминающий асинхронный двигатель, состоит из двух статорных и роторной (искательной) катушек. Его конструкция компактна, технологична, позволяет достичь большей точности отработки углов. Принцип функционирования гониометра в АРК поясняет рис. 1.3.
Конструкция рамочной антенны представляет собой две взаимно перпендикулярные обмотки Р1, Р2 на общем ферромагнитном магнитопроводе. Плоскость одной обмотки совпадает с продольной осью ВС, а другой – перпендикулярна оси. Взаимно перпендикулярные статорные катушки гониометраСт1 и Ст2, последовательно соединены с обмотками рамочных антенн. В гониометре складываются магнитные поля Ф1 и Ф2 статорных катушек пропорциональные ЭДС обмоток рамочной антенны. В результате в гониометре создается магнитное поле, результирующий вектор которого Фр определяет КУР (поле ПРС переносится внутрь гониометра). С искательной катушки радиосигнал подается в рамочный канал приемника АРК.
 Для обеспечения требуемой избирательности и чувствительности реальный АРК должен содержать супергетеродинный приемник. Поскольку для управления двигателем необходимы низкочастотные сигналы (400 Гц и ниже), ГКМВ сигналы антенн должны быть преобразованы в требуемые с сохранением фазовых соотношений, причем сигналы управления не должны мешать прослушиванию звуковых сигналов ПРС. Структурная схема типового АРК приведена на рис. 1.4.
Для обеспечения требуемой избирательности и чувствительности реальный АРК должен содержать супергетеродинный приемник. Поскольку для управления двигателем необходимы низкочастотные сигналы (400 Гц и ниже), ГКМВ сигналы антенн должны быть преобразованы в требуемые с сохранением фазовых соотношений, причем сигналы управления не должны мешать прослушиванию звуковых сигналов ПРС. Структурная схема типового АРК приведена на рис. 1.4.
Рис. 1.4. Структурная схема АРК
Основу АРК образует средневолновый супергетеродинный приемник, содержащий (в зависимости от режима работы) усилитель сигнала рамочной УсР и / или ненаправленной УсА антенн, блок приемника, в котором происходит преобразование принимаемых частот в промежуточную с последующим ее усилением и детектированием, телефонный канал, выделяющий звуковые частоты полосовым фильтром и усиливающий их усилителем низкой частоты.
Принцип действия АРК поясняется временными диаграммами на рис. 1.5.
Рис. 1.5. Временные диаграммы напряжений в АРК
Преобразование входных сигналов в управляющий двигателем сигнал осуществляется следующим образом.
Радиосигнал U1 выбранной ПРС, принятый рамочной антенной, усиливается частотно-избирательным усилителем рамочного канала УсР и через фазосдвигающую цепь подается на балансный модулятор БМ (коммутатор фазы).
Для эффективного управления двигателем необходимо, чтобы в устройстве сложения рамочный сигнал и сигнал ненаправленной антенны находились в фазе или противофазе. Но эти сигналы на выходе рамки и ненаправленной антенны сдвинуты по фазе на 90°, так как фаза ЭДС ненаправленной антенны совпадает с фазой возбуждающего ее ЭМП. Фазосдвигающая цепь осуществляет фазовый сдвиг сигнала рамки на 90°.
В модуляторе БМ сигнал U1 изменяется по амплитуде и фазе под действием модулирующего низкочастотного сигнала звукового генератора ЗГ U2. При смене полярности U2 фаза сигнала U1 изменяется на 180°, что эквивалентно механическому переключению выводов рамки с частотой ЗГ. Таким образом, на выходе БМ образуется сигнал балансной амплитудной модуляции U3, в спектре которого имеются только составляющие боковых частот при отсутствии несущей.
Управляющее напряжение частотой ЗГ U2 после усиления (АРК-15М – 135 Гц), либо усиления и преобразования поступает на статорные обмотки двигателя. В любом случае его частота должна быть меньше частотного диапазона усиливаемых частот телефонного канала (обычно 300–3000 Гц) для обеспечения возможности разделения управляющего и прослушиваемого сигналов с помощью частотных фильтров.
В результате сложения сигнала балансной амплитудной модуляции U3 с усиленным УсА сигналом рамочной антенны U4 происходит восстановление несущей частоты, в результате образуется амплитудно-модулированный сигнал U5, причем фаза его огибающей определяется фазой ЭДС рамки, а частота огибающей равна частоте модуляции ЗГ. Таким образом, в устройстве сложения осуществляется фазочувствительная амплитудная модуляция, глубина которой определяется углом отклонения рамки от положения нулевого приема.
Сигнал U5 поступает в приемник, на нагрузке детектора которого выделяется его огибающая U6.
Фазочувствительным устройством АРК является двигатель М, на обмотку возбуждения которого поступает сигнал U2 ЗГ, а на управляющую обмотку -–U6 той же частоты, снимаемым с выхода усилителя Ус компасного канала.
Двигатель механически связан с роторной катушкой гониометра и с индикатором КУР. Направление вращения двигателя зависит от соотношения фаз напряжений в его обмотках. В момент пеленга ПРС сигнал U6 отсутствует, двигатель останавливается. На индикаторе при этом отрабатывается КУР.
Передача сигналов опознавания (сообщений) ПРС происходит путем амплитудной модуляции несущей частоты, принимаемой ненаправленной и (или) рамочной антеннами. Для прослушивания таких сигналов АРК работает как обычный супергетеродинный приемник.
Погрешности
Точность пеленгования определяется условиями распространения радиоволн и характеристиками самого радиокомпаса. Погрешность ±2° достигается при использовании АРК в нормальных условиях. Аномальные условия приводят к эффектам, получившим названия «ночной», «береговой» и «горный».
Главными путями распространения радиоволн диапазона СВ и ДВ, используемых в АРК являются поверхностные (земные) и пространственные (ионосферные) волны. Ночной эффект проявляется в замирании сигнала, появлении дрейфующего и расплывчатого минимума ДНА рамочной антенны, что приводит к значительному уменьшению дальности пеленгования. В дневное время пространственные радиоволны практически полностью поглощаются нижним слоем D ионосферы, возникающим из-за ионизации молекул воздуха солнечным излучением. Пеленгование осуществляется по поверхностной волне и ошибки в показаниях АРК отсутствуют.
После захода Солнца слой D ионосферы исчезает (рекомбинирует) и пространственные волны отражаются от более стабильного вышележащего ионосферного слоя Е, достигая антенн АРК наряду с поверхностной волной. Возникает интерференция поверхностной и пространственной волн. Фаза результирующей волны, по которой определяется угловая информация, становится случайной. На больших дальностях ночной эффект приводит к погрешности до 10°.
На удалениях до 60 км от ПРС, когда поле поверхностной волны значительно превышает поле пространственной волны, ошибка в показаниях АРК практически отсутствует. На удалениях свыше 60 км поле пространственных радиоволн становится соизмеримым, а свыше 100 км превышает поле поверхностных радиоволн. Это приводит к заметной ошибке или неустойчивости показаний АРК.
Береговой эффект (береговая рефракция) возникает при распространении радиоволн через береговую черту моря, т. к. фазовые скорости распространения радиоволн, зависящие от электрических характеристик подстилающей поверхности, над сушей и над морем различны. Участки фронта волны над морем будут при распространении опережать участки фронта, находящиеся над сушей, что приведет к повороту фронта радиоволны. При углах между радиолинией и береговой чертой до 10° погрешность достигает 4–5°. Погрешность уменьшается с удалением от береговой черты и с увеличением высоты полета, а при достижении указанных дистанций двух-трех длин волн пеленга, практически отсутствует.
Местный характер носит и горный эффект, связанный с интерференцией прямой волны и волны, отраженной от гор.
При полетах на сравнительно малых высотах в показаниях АРК присутствуют погрешности, обусловленные искажением фронта волны пеленгуемой
радиостанции из-за рельефа местности. Наиболее характерны подобные искажения для горной (холмистой) местности – горный эффект. Они имеют нерегулярный характер, что приводит к колебаниям и вращению стрелки индикатора КУР, как при действии ночного эффекта.
Погрешности, возникающие при полетных эволюциях ВС (креновые погрешности) обусловлены двумя факторами: отклонением от вертикали оси вращения рамки и изменением характера радиодевиации. При полетах с креном до 15–17° (при угле тангажа до 10°) погрешность не превышает 3–4°. Но уже при полетах с креном 20° и выше она начинает резко расти. Креновые погрешности в показаниях АРК появляются только тогда, когда совершается полет одновременно с углами крена и тангажа.
Значительные погрешности возможны из-за влияния окружающих рамочную антенну металлических частей фюзеляжа и оборудования, шасси, антенн радиооборудования и т. п. Приходящие от ПРС радиоволны возбуждают в них токи высокой частоты, которые создают электромагнитные поля вторичного излучения.
Направление распространения результирующего поля, полученного в результате сложения прямой волны с волной вторичного излучения, в общем случае не совпадает с направлением на радиостанцию. В результате этого направление на работающую радиостанцию будет определяться с погрешностью, называемой радиодевиацией.
Численно радиодевиация ΔP измеряется углом между действительным направлением на радиостанцию КУР и углом (направлением), измеренным с помощью радиокомпаса ОРК: ΔP = КУР – ОРК. Здесь ОРК – угол между продольной осью самолета и направлением на радиостанцию, измеренный с помощью радиокомпаса.
Радиодевиация зависит от конфигурации ВС относительно ПРС и носит четвертной характер, имея минимум при КУР 0°, 90°, 180°, 270°, достигая максимальных значений при КУР 45°, 135°, 225°, 315°.
Поскольку радиодевиация является систематической погрешностью, то ее можно минимизировать специальными устройствами – электрическими и механическими компенсаторами. Электрическая компенсация достигается
использованием в неподвижной рамочной антенне продольной и поперечной обмоток с различными действующими высотами. Механическая компенсация заключается в введении в систему передачи углов поворота от рамки к стрелке
индикатора проскальзывания (рассогласования) равного радиодевиации, зависящей от КУР. Остаточная радиодевиация при необходимости учитывается экипажем ВС с помощью графиков, имеющихся на борту.
 На рис. 1.6 приведена схема, поясняющая принцип работы механического компенсатора радиодевиации. Для простоты рассмотрения показан горизонтальный разрез промежуточного звена между осью двигателя вращающего рамку (искательную катушку гониометра) 1 и диском 9, связанным с ротором датчика углов поворота стрелки индикатора. В диаметральное отверстие оси 1 вставлена спица 2, вращающаяся вместе с осью и свободно перемещающаяся в радиальном направлении. На конце спицы имеется ролик 3, прижимаемый пружиной 8 к стальной ленте 6, которая носит название лекало. Форма лекало задается с помощью 24-х регулировочных винтов 4, равномерно размещенных по окружности металлического кольца 5 (на рис 6 кольцо и лекало показаны не полностью). Вращение и радиальное перемещение спицы передается на диск рычагом 7.
На рис. 1.6 приведена схема, поясняющая принцип работы механического компенсатора радиодевиации. Для простоты рассмотрения показан горизонтальный разрез промежуточного звена между осью двигателя вращающего рамку (искательную катушку гониометра) 1 и диском 9, связанным с ротором датчика углов поворота стрелки индикатора. В диаметральное отверстие оси 1 вставлена спица 2, вращающаяся вместе с осью и свободно перемещающаяся в радиальном направлении. На конце спицы имеется ролик 3, прижимаемый пружиной 8 к стальной ленте 6, которая носит название лекало. Форма лекало задается с помощью 24-х регулировочных винтов 4, равномерно размещенных по окружности металлического кольца 5 (на рис 6 кольцо и лекало показаны не полностью). Вращение и радиальное перемещение спицы передается на диск рычагом 7.
Задача компенсации радиодевиации состоит в том, чтобы придать лекалу такую форму, при которой на каждом курсовом угле дополнительный поворот диска из-за радиального перемещения спицы был равен величине радиодевиации.
В современных АРК радиодевиация может быть минимизирована в вычислительном устройстве путем введения поправок.
При эксплуатации АРК следует учитывать влияние на точность пеленгования электромагнитных и электростатических помех, действующих в рабочем диапазоне частот, что может привести к «уводу» ВС от выбранного направления, затруднению считывания показаний из-за колебаний стрелки индикатора.
Основные параметры
Основные технические параметры, характеризующие возможности АРК, приведены в таблице.
| Параметр | Типы АРК | |||
| АРК-15М | АРК-22 | Becker 3502 | KR 87 | |
| Диапазон рабочих частот, кГц | 150–1799,5 | 150–1750 | 190–1799,5 | 200–1799 |
| Дискретность сетки частот, кГц | 0,5 | 1,0 | ||
| Дальность действия, км | Не менее 200 | Не менее 120 | ||
| Чувствительность приемника при соотношении сигнал / шум 6 дБ, мкВ | 5–8 режим АНТ | 7 режим АНТ | – | 70 режим ANT 150 режим ADF |
| Погрешность измерения КУР (2σ), град. | ±2* | ±1,5** | ±2 | ±3*** |
| Потребляемая мощность от сети постоянного тока, Вт, переменного тока, ВА | 54 Вт 36 ВА | 22 Вт 85 ВА | 30 Вт | 12 Вт |
| Масса комплекта (без кабелей), кг | 15 | 9 | – | 1,5 приемник 1,9 антенна |
* При напряженности поля 1–20 мВ/м.
** При напряженности поля 50–65 мкВ/м.
*** При напряженности поля свыше 70 мкВ/м.
Режимы работы
АРК имеет режимы работы «Антенна», «Компас», «Рамка».
В режиме «Антенна» радиопеленгования не происходит, прием сигналов осуществляется только на ненаправленную антенну, рамочная антенна отключена. Радиокомпас работает как супергетеродинный приемник гектометрового диапазона волн. Этот режим предназначен для настройки АРК на рабочую частоту и прослушивания (опознавания) радиостанций. Приемник имеет максимальную чувствительность.
Режим «Компас» – основной режим работы, при котором осуществляется автоматическое и однозначное измерение КУР. Принцип функционирования АРК в этом режиме поясняется структурной схемой (см. рис. 1.4) и временными диаграммами напряжений (см. рис. 1.5).
Режим «Рамка» предназначен для определения КУР методом слухового пеленгования. Прием сигналов осуществляется только на рамочную антенну. При нажатии кнопки «Рамка» на ПУ на управляющую обмотку двигателя М поступает напряжение U2 ЗГ вместо U6 Ус (см. рис. 1.6), двигатель начинает вращаться по часовой стрелке, следовательно, вращается и ДНА рамочной антенны. Пеленгование осуществляется по минимуму слышимости сигнала ПРС. Так как ДНА имеет два нулевых приема, то определение КУР возможно с ошибкой 180º.
Режим используется в условиях повышенного уровня электростатических помех, что исключает их прием ненаправленной антенной, устраняя тем самым колебания стрелки индикатора. Может быть более полезен для помехоустойчивого прослушивания сигналов за счет снижения чувствительности АРК на углах, близких к нулевому приему, когда ДНА разворачивают на 90° относительно нулевого приема в положение максимального приема.
 Кроме прослушивания ПРС (NDB) радиостанций, излучающих, как правило, телефонные амплитудно-модулированные сигналы класса А3Е, (A2А), АРК позволяют прослушивать телеграфные немодулированные сигналы А1А. На рис. 1.7 показаны временные диаграммы поступающих на вход приемника телеграфного UТЛГ и телефонного UТЛФ сигналов при передаче тире-точка азбукой Морзе. Отсюда понятно, что обычным приемником прослушать информацию, содержащуюся в UТЛГ, невозможно (на выходе детектора приемника, выделяющего модулирующее напряжение UМОД (огибающую несущей частоты), сигнал будет отсутствовать).
Кроме прослушивания ПРС (NDB) радиостанций, излучающих, как правило, телефонные амплитудно-модулированные сигналы класса А3Е, (A2А), АРК позволяют прослушивать телеграфные немодулированные сигналы А1А. На рис. 1.7 показаны временные диаграммы поступающих на вход приемника телеграфного UТЛГ и телефонного UТЛФ сигналов при передаче тире-точка азбукой Морзе. Отсюда понятно, что обычным приемником прослушать информацию, содержащуюся в UТЛГ, невозможно (на выходе детектора приемника, выделяющего модулирующее напряжение UМОД (огибающую несущей частоты), сигнал будет отсутствовать).
Для прослушивания немодулированных сигналов в приемнике АРК применяется внутренняя модуляция UТЛГ генератором низкой частоты (800 Гц – АРК-15М, 1000 Гц – KR 87), которая прослушивается при включении на ПУ режима ТЛГ (BFO).
Автоматический радиокомпас АРК-15М
Состав аппаратуры
В состав АРК входят следующие блоки:
1. Рамочная антенна представляет собой прямоугольный блок из ферромагнитного материала, на котором находятся две взаимно перпендикулярные обмотки. Конструкция залита радиопрозрачным материалом, имеет четыре вывода и устанавливается сверху или снизу фюзеляжа, обычно по оси ВС.
2. Ненаправленная антенна. Ее конструкция зависит от типа ВС. Может быть штыревой, L-образной формы, в виде нескольких витков провода, совместно с рамочной антенной может образовывать антенный блок.
3. Антенное согласующее устройство – для согласования ненаправленной антенны с приемником. По условиям функционирования должно располагаться внутри фюзеляжа рядом (у основания) антенны.
4. Эквивалент кабеля рамки – для согласования рамочной антенны с гониометром (приемником) необходим кабель длиной 10 м. Если используется более короткий кабель, то его удлинение реализуется последовательным включением эквивалента, на шильдике которого указана компенсируемая длина. Коробка эквивалента устанавливается рядом с приемником в отсеке оборудования ВС.
5. Приемник на амортизационной раме. Гониометр конструктивно объединен с приемником и находится в передней части блока приемника.
6. Пульт управления служит для дистанционного управления работой АРК, размещается на верхнем щитке или на центральном пульте пилотов. В двухпультовых комплектах второй пульт устанавливается на рабочем месте штурмана.
Информация о КУР отображается на стрелочных индикаторах (указателях) РМИ-2Б, УГР-4УК, УПДБ, УШДБ, ПНП, ИКУ-1А и др. На магистральных ВС для повышения оперативности работы и расширения функциональных возможностей устанавливаются два комплекта АРК.
Управление работой
Органы управления АРК-15М расположены на передней панели ПУ (рис. 1.8).
Переключатель режимов работы на 4 положения: «ВЫК.», «КОМ.», «АНТ.» и «РАМ.» – для включения питания (из положения «ВЫК.» в любое положение) и выбора режима работы «Компас», «Антенна» или «Рамка».
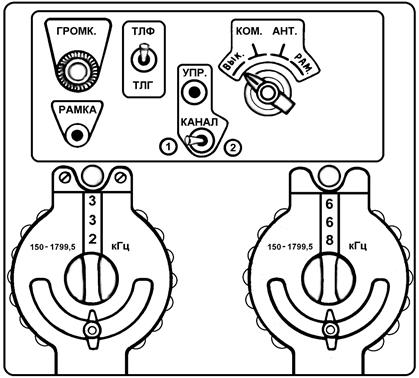
Рис. 1.8. Пульт управления АРК-15М
Наборные устройства частот настройки АРК (2 шт.). Устройство имеет три ручки, совмещенные на одной оси. Внешней ручкой, имеющей оцифровку от 1 до 17, устанавливаются сотни,средней ручкой – десятки и малой (внутренней) ручкой с дискретностью 0,5 кГц – единицы килогерц.
Переключатель «КАНАЛ» осуществляет ручное подключение к приемнику левого (положение «1») либо правого (положение «2») наборного устройства, при этом загорается соответствующая сигнальная лампа, расположенная над устройством.
Переключатель «ТЛФ – ТЛГ» предназначен для прослушивания (в положении «ТЛГ») тонально-немодулированных сигналов ПРС.
Ручка «ГРОМК.» – для регулировки громкости прослушивания сигналов ПРС.
Кнопка «РАМКА» – для принудительного вращения искательной катушки гониометра и, соответственно, стрелки указателя КУР.
Кнопка «УПР.» – для переключения управления работой АРК на данный пульт при двухпультовом варианте комплектации АРК.








