 2020-08-05
2020-08-05 1233
1233
Ветроэнергетическая установка (ВЭУ) в режиме выработки электроэнергии должна работать в автоматическом режиме без непосредственного участия обслуживающего персонала. Для обеспечения автоматической работы используются специальные устройства, осуществляющие управление ВЭУ. В зависимости от сложности решаемых задач это могут быть регуляторы прямого действия, системы регулирования и системы автоматического управления.
3.1. Автоматические регуляторы.
Автоматические регуляторы – это приборы, специально присоединяемые к машинам, аппаратам или иным техническим устройствам для поддержания или изменения какой-либо величины без непосредственного участия человека.
Часть машины или аппарата, на которую воздействует регулятор, называется регулирующим органом или органом управления. Величина, подлежащая заданным условиям изменения или поддержания, называется регулируемой величиной или регулируемым параметром.
В случае, если регулятор при отклонении регулируемого параметра от заданного значения развивает усилие и энергию, достаточные для перемещения регулирующего органа с требуемой скоростью, регулятор называют регулятором прямого действия.
Благодаря исключительной простоте конструкции регуляторы прямого действия широко распространены, но область применения их ограничена объектами, требующими небольших усилий для перемещения регулирующих органов.
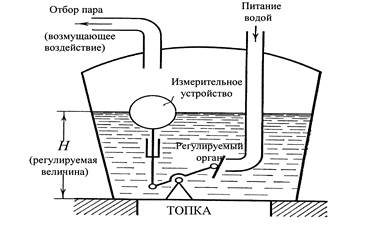
Регулятор уровня воды котла паровой машины И,И. Ползунова (1765г.) и регулятор скорости паровой машины Уатта (1784 г.) относятся к первым промышленным автоматическим устройствам (рис. 3.2., 3.3.).Их появление в эпоху промышленного переворота в Европе на рубеже XVIII и XIX в.в. знаменует новый этап в развитии автоматики, связанной с ее внедрением в промышленность. И основная заслуга Ползунова и Уатта состоит именно в промышленном применении регуляторов, сами же идеи, на которых основана конструкция этих регуляторов, использовались намного раньше. Неоднократно исследователи в области истории техники пытались установить приоритеты в области создания автоматических устройств.
Так, некоторые историки науки утверждают, что Уатт, вероятно, приспособил для своего регулятора устройство, применяемое для изменения зазора между жерновами ветряной мельницы, и что Уатт взял свой знаменитый патент на усовершенствование, а не на изобретение. К сожалению, описания этого более раннего устройства не сохранилось.
Что касается поплавкового регулятора, к которым относится регулятор Ползунова, то такие регуляторы были известны за 300 лет до нашей эры.
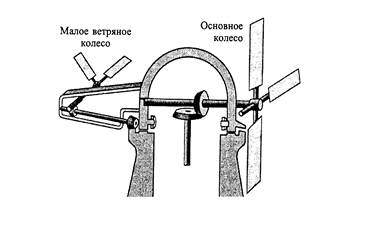
Автоматический поворотный механизм для ветряных мельниц был изобретен Мейкле около 1750 г. (рис.3.1.), а маятниковый автопилот для автоматического выдерживания высоты полета относится к ранним самолетам (рис. 3.4).
 | |||||||
 | |||||||
| |||||||
| |||||||
3.2. Центробежный регулятор поворота
лопастей ветродвигателя
В современной ветроэнергетике регуляторы прямого действия используются на ВЭУ малой и очень малой мощности.
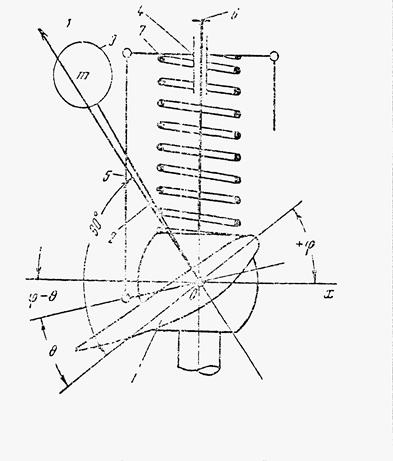
Примером такого регулятора может служить центробежный регулятор поворота лопастей ВЭУ, схема которого приведена на рис. 3.5 [2]. Каждая лопасть 1 несет на себе жестко связанный с нею при помощи державки 2 центробежный груз 3. Муфта 4, которая может свободно скользить вдоль оси ветроколеса, связана шатуном 5 с кривошипом, образующим некоторый угол с державкой. Муфта удерживается около упора 6 пружиной 7. Если число оборотов ветроколеса достигнет такой величины, что центробежные силы, действующие на грузы и лопасти, превзойдут силу упругости пружины, то лопасти с грузами будут поворачиваться вокруг продольной оси лопасти. Вследствие уменьшения угла атаки лопастей уменьшаются аэродинамические силы и мощность, развиваемая ветроколесом.
Регулирование числа оборотов ветродвигателя поворотом лопастей центробежным регулятором заключается в том, чтобы лопасти, которые могут свободно вращаться вокруг своей продольной оси и находящиеся под воздействием сил центробежных, аэродинамических и сил упругости пружины, принимали такое положение относительно плоскости вращения ветроколеса, при котором аэродинамическая мощность ветродвигателя равна мощности нагрузки.
|
Рис. 3.5. Центробежный регулятор угла поворота лопасти ВЭУ.
При таком движении механическая система «ветроколесо-регулятор-электрогенератор» имеет две степени свободы:
· вращение ВК в целом, а, следовательно, и каждой лопасти, вокруг оси ветроколеса;
· вращение лопастей вокруг их продольных осей с одновременным поступательным движением скользящей муфты регулятора.
Процесс регулирования может быть разбит на три этапа.
Первый этап – работа ветроколеса до начала регулирования, когда аэродинамические и центробежные силы меньше сил упругости пружины, благодаря чему пружина удерживает механизм регулирования, а следовательно, и сами лопасти в определенном положении, характеризуемом углом установки лопастей по отношению к плоскости вращения ВК. Последнее достигается введением в механизм регулирования «упора», ограничивающего ход механизма. На этом этапе регулирования лопасти по существу жестко связаны с втулкой ветроколеса.
Второй этап регулирования начинается с того момента, когда число оборотов ВК достигает такой величины, при которой центробежные силы вместе с аэродинамическими превысят силы упругости пружины, и лопасти под их влиянием повернутся на некоторый угол, при котором все силы, действующие на лопасть, будут находиться в равновесии.
Третий этап регулирования – это останов ВК: механизм регулирования приводится при помощи рычага управления в такое положение, при котором момент аэродинамических сил, действующих на неподвижное ВК, становится равным нулю.
3.2. Система управления ВЭУ.
Ветроэнергетические установки большой и средней мощности представляют собой сложные технические сооружения весьма значительных размеров. Примеры таких сооружений можно увидеть на рис. 3.5., 3.6., а о габаритах судить по высоте башни (h) и диаметре ветроколеса (d), которые составляют для:
ЦВЭИ Д-50 (проект): h=50м; d=50 м;
 ВЭУ Р-1 : h=36м; d=50 м.
ВЭУ Р-1 : h=36м; d=50 м.
Для управления такими установками используются многоконтурные системы автоматического управления, которые, как правило, сочетаются с системами контроля и диагностики, образуя единый комплекс, построенный по иерархическому принципу.
Что касается систем регулирования, то они практически ничем не отличаются от систем автоматического управления, имея в своем составе измерительные устройства и исполнительный механизм, формирование закона управления, как правило, реализуется на базе цифровой микропроцессорной техники. Термин «система регулирования» применяется обычно к простым и прежде всего одномерным системам. Системой регулирования можно считать систему регулирования числа оборотов ВЭУ малой мощности, в то время как ее ориентация на ветер выполняется с помощью других, например, аэродинамических методов за счет установки хвоста или расположения ветроколеса за гондолой по направлению ветра.
Системы управления для современных ветроэнергетических установок являются сложными автоматическими устройствами, построенными на базе цифровых вычислительных машин. В качестве характерного примера рассмотрим систему автоматического управления САУ Р-1 для управления ветроэнергетической установкой большой мощности ВЭУ Р-1.
Для рабочего проектирования и изготовления опытных образцов эскизный проект ВЭУ мощностью 1000 кВт утвержден и рекомендован в 1990 г. Первая ВЭУ смонтирована на опытно-экспериментальной Калмыцкой ВЭС в сентябре 1994г. и включена в опытно-промышленную эксплуатацию в декабре 1994 г. Производство этой ВЭУ, разработанной МКБ «Радуга», было организовано на Тушинском машиностроительном заводе в Москве.
ВЭУ имеет трехлопастное ветроколесо пропеллерного типа. Лопасти установки имеют профиль «Эсперо», несущим элементом лопастей является стальной лонжерон коробчатого сечения, обшивка выполняется из алюминиевых сплавов.
ВЭУ Р-1 с горизонтальной осью вращения имеет цельноповоротные лопасти, что позволяет при больших скоростях ветра, больших 13,6 м/с, стабилизировать на постоянном уровне момент и обороты ветроколеса, обеспечивать разгон и торможение ВК без дополнительных устройств, уменьшить нагрузки при штормовом ветре.
Опорная башня изготавливается из низколегированной стали и имеет коническую форму. Установка предназначена параллельно для работы с энергосистемой в составе ветроэлектростанций.
Система управления предназначена для:
- управления ВЭУ в заданном диапазоне скоростей ветра;
- проведения самоконтроля и контроля систем ВЭУ, сбора и обработки информации с датчиков систем ВЭУ для диагностики их состояния;
- формирования сигналов и команд, необходимых для функционирования систем ВЭУ;
- исполнения команд дистанционного управления ВЭС.
Реализация задач автоматического управления, контроля и диагностики ВЭУ осуществляется вычислительным комплексом, построенным на базе цифровой вычислительной машины.
В состав вычислительного комплекса входят три подсистемы:
- система автоматического управления (САУ);
- система контроля и диагностики (СКД);
- система контроля оператора (СКО).
Подсистема СКД осуществляет сбор и обработку информации о состоянии систем ВЭУ, передачу необходимой информации в энергонезависимое запоминающее устройство.
Подсистема СКО позволяет производить ручное управление системами ВЭУ при пусконаладочных работах и в управляемых режимах.
Подсистема САУ управляет основными системами ВЭУ: на основе информации от СИПВ и датчиков состояния подсистем САУ формирует управляющие сигналы, поступающие в СГЭЭ, в АПМ на привод поворота гондолы, в тормозную и аварийную системы. САУ является многоконтурной системой управления ВЭУ Р-1, структурная схема которой приведена на рис. 3.8.
Эта система автоматического управления содержит два канала управления:
- канал управления частотой вращения;
- канал ориентации на ветер.
Канал управления частотой вращения содержит связанные между собой ветроколесо, агрегат передачи мощности (АПМ), систему генерирования электроэнергии (СГЭЭ). Состояние этой связки определяется угловой скоростью вращения (wв) и выходной мощностью СГЭЭ (N), значения этих переменных определяются датчиком угловых скоростей (ДУС) и измерителем мощности (ИМ). Эта информация, а также значение скорости ветра, измеренное системой измерения параметров ветра (СИПВ) поступают в цифровую вычислительную машину (ЦВМ), которая вырабатывает управляющие сигналы:
- sj - сигнал управления отклонением лопасти, который поступает на механизм поворота лопасти (МПЛ), посредством которого лопасть устанавливается в нужное положение;
- sг – сигнал управления генератором;
- sт – сигнал управления тормозом.
Соответственно канал ориентации на ветер (пунктир) содержит опорно-поворотное устройство (ОПУ), положение которого относительно направления ветра (yв) измеряет СИПВ и подает в ЦВМ, где вырабатывается управляющий сигнал поворота гондолы (sy), в соответствии с которым привод поворачивает ОПУ, ориентируя ветроколесо на ветер.
  | |||
| |||
Режимы работы ВЭУ (останов, ожидание, подготовка к запуску, запуск, рабочий режим, холостой ход, торможение), связь между ними и условия перехода из одного режима в другой, иллюстрируются на рис. 3.9..



Как ви
|
Как видно, условиями перехода являются: скорость ветра, вырабатываемая мощность, скручивание кабеля и команда оператора, которая имеет наивысший приоритет.
В режиме ожидания гондола и лопасти застопорены, причем лопасти находятся во флюгерном положении; все системы ВЭУ обесточены за исключением дежурного питания системы собственных нужд (ССН), которое подается на устройства включения СИПВ и СУ. Переход из режима ожидания в режим подготовки к запуску происходит по величине скорости ветра при условии разрешения работы со стороны ВЭС и отсутствии запрета со стороны оператора.
В режиме подготовки к запуску СУ производит самоконтроль и контроль всех подсистем; при условии их исправности и готовности на них подается питание и происходит их включение; снимается стопор гондолы, и она разворачивается на ветер; снимаются стопора лопастей и они переводятся из флюгерного состояния в рабочую зону. После завершения этих операций ВЭУ переходит в режим запуска.
В режиме запуска осуществляется отклонение лопастей ВК в положение, соответствующее скорости ветра и угловой скорости вращения ВК, результатом чего является раскрутка ВК. При достижении условий включения СГЭЭ переходит в режим выработки электроэнергии, формируя сигнал «СГЭЭ в работе», по которому ВЭУ переходит в рабочий режим.
В рабочем режиме все системы ВЭУ находятся в рабочем состоянии; СГЭЭ подключена к электрической сети и вырабатывает электроэнергию; лопасти отклоняются в соответствии со скоростью ветра, оборотами ВК и вырабатываемой мощностью; гондола ориентируется на ветер. Осуществляется контроль скручивания кабеля. Выход из рабочего режима в режим торможения происходит при превышении максимальной скорости ветра, уменьшении вырабатываемой энергии ниже минимального уровня, при превышении ограничений по углу скручивания кабеля.
В режиме торможения после отключения СГЭЭ останавливается и стопорится гондола; лопасти ВК переводятся во флюгерное положение по закону, обеспечивающему торможение ВК и его остановку; лопасти ВК стопорятся; после этого ВЭУ переходит в режим останова.
В режиме останова производится анализ причин перехода в режим торможения. Если причинами остановки ВЭУ являются отказные или аварийные ситуации, все системы ВЭУ, включая СУ, обесточиваются, и последующее её включение возможно только после обследования специалистами. В противном случае ВЭУ переходит в режим ожидания.
В режим холостого хода ВЭУ переходит из режима подготовки к запуску по команде оператора. Этот режим предназначен для проведения исследований, и в первую очередь, уточнения аэродинамических характеристик. На этом режиме СУ осуществляет ориентацию гондолы на ветер, удерживая лопасти ВК в заданном оператором положении. Осуществляется контроль скручивания кабеля. Выход из режима холостого хода с переходом в режим торможения происходит по сигналу оператора при превышении максимальной скорости ветра или при превышении допустимого угла скручивания кабеля.
Система управления ВЭУ Р-1 обеспечивает работу установки в автоматическом режиме без участия оператора.

