 2020-08-05
2020-08-05 133
133
Для построения переходных процессов в замкнутой цифровой системе по каналам задание – выходная величина и задание – управляющие воздействие воспользуемся уравнениями в конечных разностях.
Суть метода заключается в следующем. Пусть передаточная функция цифровой системы
 .
.
Этой передаточной функции соответствует уравнение в конечных разностях:
 .
.
Значение искомой выходной величины равно
 . (5.19)
. (5.19)
Согласно формуле (5.19) получим, что переходная функция замкнутой цифровой системе по:
· каналу задание – выходная величина
y[k]=0,647726×x[k-1] –0,620803×x[k-2] –0,037272×x[k-3] +0,149369×x[k-4] –0,024633×x[k-2] –0,001394×x[k-2] +1,481007×y[k-1] –0,695097×y[k-2]+ +0,101098×y[k-3];
· каналу задание – управляющие воздействие
y[k]=3,540075×x[k] –10,485749×x[k-1] +12,686121×x[k-2] –
–8,004397×x[k-3] +2,770507×x[k-4] –0,497542×x[k-5]+0,036182×x[k-6]+ +1,481007×y[k-1] –0,695097×y[k-2]+ +0,101098×y[k-3].
Данные расчетов были сведены в таблицы с учетом того, что x[k]=1.
Таблица 5.1 – Переходная функция замкнутой цифровой системе по каналу задание – выходная величина
| k | y[k] |
| 0 | 0 |
| 1 | 0,648 |
| 2 | 0,986 |
| 3 | 1 |
| 4 | 1 |
6 Оптимальное управляющие воздействие и реакция на него приведенной непрерывной части
Оптимальное управляющие воздействие было найдено в пункте 5 и в координатах времени имеет следующий вид:
m(t)=3,54(h(t)-h(t-T0)) –1,703(h(t-T0)-h(t-2*T0))+ (6.1)
+0,758(h(t-2*T0)-h(t-3*T0))+0,4 h(t-3*T0),
где
h(t) – функция Хевисайда;
T0 – период квантования равный 1,25.
Тогда
m(t)=3,54(h(t)-h(t-1,25)) –1,703(h(t-1,25)-h(t-2,5))+ (6.2)
+0,758(h(t-2,5)-h(t-3,75))+0,4 h(t-3,75).
|
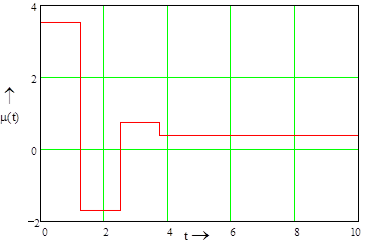
Рисунок 6.1 – Оптимальное управляющие воздействие.
Для нахождения реакции непрерывной линейной части на данное воздействие воспользуемся изображением Лапласа. Используя свойство линейность данного изображения и теорему запаздывания найдем, что
j(t)= 3,54(g(t) - g(t-1,25)) –1,703(g(t-1,25)-g(t-2,5))+ (6.3)
+0,758(g(t-2,5)-h(t-3,75))+0,4 h(t-3,75),
где
g(t)=f(t)h(t),
 – переходная функция линейной части, найденная нами в пункте 4.
– переходная функция линейной части, найденная нами в пункте 4.
Изобразим реакцию непрерывной линейной части на оптимальное управляющие воздействие.
|
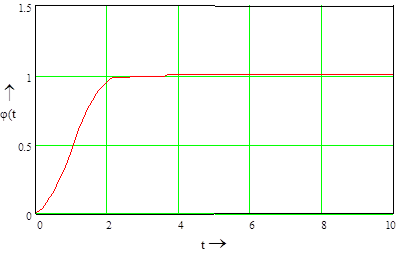
Рисунок 6.2 – Реакция непрерывной линейной части на оптимальное управляющие воздействие
На этом все построения окончены.
Заключение
В данной курсовой работе был сделан синтез и анализ оптимальной одноконтурной САУ при использовании трех типов регуляторов, реализующих П-, ПИ- и ПИД-закон регулирования. Проведены сравнительный характеристики данных типов регуляторов и был сделан вывод, что ПИД-закон регулирования является наилучшим среди рассмотренных.
Были проведены расчеты по использованию данных регуляторов в цифровых системах. Как показали расчеты, несмотря на то, что цифровые системы – это системы дискретного действия и действуют через определенные промежутки времени, переходные процессы в цифровых системах не сильно отличаются от переходных процессов в непрерывных системах, а конечное состояние выходной величины одинаково. Кроме того развитие микропроцессорной техники и использование теории управления в цифровых системах позволяют создать регуляторы различной сложности и с заранее заданных свойствами. Один из регуляторов, обеспечивающий перевод системы из одного состояния в другое за минимальное число периодов квантования при наличии ограничения на управляющие воздействие, был синтезирован в данной курсовой работе.
Список литературы
1. Пугачев В.И. Методические указания по курсу: «Теория автоматического управления» для студентов всех форм обучения специальности 21.01 – автоматика и управление в технических системах. Часть I. Краснодарский политехнический институт – Краснодар, 1990. – 157 с.
2. Пугачев В.И. Методические указания по курсу: «Теория автоматического управления» для студентов всех форм обучения специальности 21.01 – автоматика и управление в технических системах. Часть III. Краснодарский политехнический институт – Краснодар, 1995. – 114 с.
3. Колосов С. П., Калмыков И. В.,Нефедова В. И. “Элементы автоматики”
издательство “Машиностроение”, Москва, 1970.








