 2020-08-05
2020-08-05 991
991Цель лабораторной работы
Изучение принципа действия и устройства электронного автоматического моста.
Описание принципа действия термометров сопротивления
Принцип действия термометров сопротивления основан на изменении электрического сопротивления проводника при изменении температуры. Зная зависимость сопротивления от температуры, можно по его измерению определять температуру среды, в которую помещен термометр сопротивления.
Известно, что при нагреве металлы увеличивают сопротивление от 0,4–0,6% на 10С, а окислы металлов (полупроводники) уменьшают свое сопротивление в 8 – 15 раз по сравнению с металлами. Графически это выглядит так (рис.1).
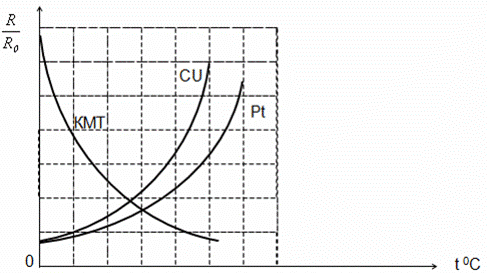
Рис. 1 – Зависимость сопротивления термометров от температуры
(СU – медный; Pt – платиновый; КМТ – полупроводниковый)
Зависимость сопротивления металлов от температуры в небольшой интервале температур определяется уравнением:
Rt = Rt’ * [1 + α * (t – t’)]; (1)
где Rt – сопротивление металлического проводника при температуре;
Rt’ – сопротивление того же проводника при температуре;
(t – t’) – интервал измерения температур;
α – коэффициент температурного сопротивления.
Конструкция электронного автоматического моста и его измерительная схема
Электронные уравновешенные мосты переменного тока предназначены для измерения, записи и регулирования (при наличии регулирующего устройства) температуры и других величин, измерение которых может быть преобразовано в изменение активного сопротивления. Прибор состоит из следующих основных блоков: корпуса, каретки с пером, усилителя, панели внешних коммутаций лентопротяжного механизма, регулирующего устройства, измерительного механизма.
Терморезисторы - нелинейные резисторы, изготовленные из полупроводниковых материалов, имеющих большой температурный коэффициент сопротивления (ТКС). У большинства терморезисторов ТКС отрицательный (-4,2 до -8,4 %/ 0С). Терморезисторы с положительным ТКС называют позисторами.
В зависимости от применяемого полупроводникового материала терморезисторы разделяют:
кобальто-марганцевые КМТ (начальное сопротивление Rн от 22 до 1000 кОм, ТКС от -4.2 до -8.4 интервал рабочих температур от -60 до +1800С);
медно-марганцевые ММТ (Rн = 1-220 кОм, ТКС от -2.4 до –5, -10 - +500 0С);
титанобариевые с положительным ТКС - СТ5 (Rн = 0,02 – 0,14 кОм, ТКС = 20, -20 - +200 0С).
В основу работы электронных автоматических мостов КСМ2 положен нулевой метод измерения сопротивления.
Измерительная схема автоматического электронного равновесного моста КСМ2 представлена на рисунке 2.
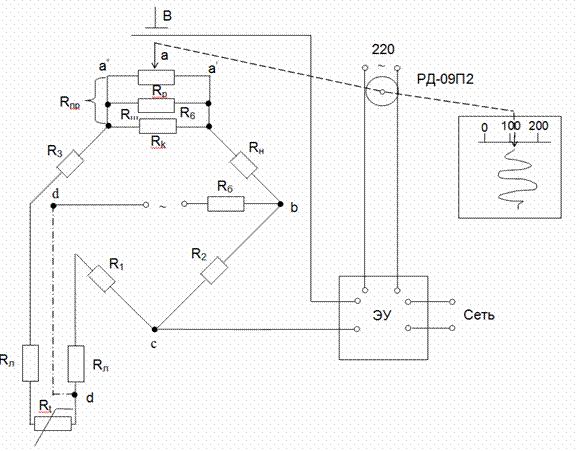
Рис. 2 – Измерительная схема автоматического электронного равновесного моста КСМ2
Измерительная схема уравновешенного моста состоит из резисторов, имеющих следующие назначения:
Rp – реохорд, калиброванное сопротивление;
Rш – шунтирующее сопротивление, для ограничения тока, протекающего через реохорд;
Rк – резистор для задания верхнего предела измерений;
Rн – резистор для задания начала шкалы;
R1, R2, R3 – постоянные сопротивления;
Rб – сопротивления в диагонали питания, для ограничения тока;
Rt – термометр сопротивления;
Rл – резисторы для подгонки сопротивления линии связи до 2,5 Ом.
К точкам подключен источник питания – напряжение переменного тока 6.3 В. Подключение термометра к прибору производится по трехпроводной схеме. В этом случае сопротивление проводов распределяется между двумя прилегающими плечами моста. Применение трехпроводной схемы для присоединения термометра снижает величину температурной погрешности, вызванной изменением сопротивления соединительных проводов Rл, вследствие изменения температуры окружающего воздуха.
При изменении температуры контролируемого объекта изменится сопротивление термометра Rt и нарушится равновесие измерительной схемы.
В результате в измерительной диагонали моста появится напряжение разбаланса, которое доводится усилителем до величины, достаточной для приведения в действие двигателя. Таким образом происходит автоматическое включение двигателя различных устройств и механизмов.
Ротор двигателя будет вращаться до тех пор, пока существует сигнал, вызванный разбалансом схемы. Одновременно перемещается указатель прибора по шкале и движок по реохорду до наступления равновесия в измерительной схеме. В момент равновесия измерительной схемы положение указателя на шкале определяет значение измеряемой величины, т. е. температуру контролируемого объекта в данный момент времени.








