 2020-09-24
2020-09-24 124
124|
Рис. 1.3. Типовая функциональная схема системы автоматического регулирования |
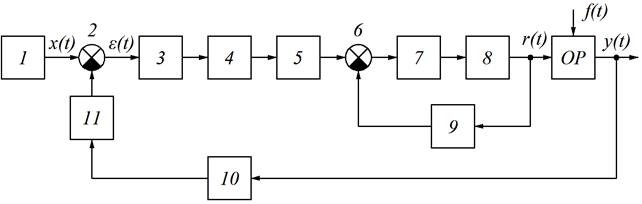
Любая управляющая система включает в себя различные технические средства, которые могут быть подразделены на следующие классы: средства для восприятия и первичного преобразования информации; средства для передачи и представления информации; средства для переработки информации; средства для получения управляющих воздействий. Их роль поясним на примере типовой функциональной схемы системы автоматического регулирования, изображенной на рис. 1.3.
Система состоит из объекта регулирования ОР и ряда устройств:
- задающее устройство 1;
- вычитающее устройство 2, формирующее на основании сравнения задающего сигнала x (t) и управляемой величины сигнал ошибки ε (t);
- преобразующее устройство 3, трансформирующее сигнал ошибки в форму, удобную для его последующего использования;
- последовательное корректирующее устройство 4 (регулятор), придающее системе требуемые статические и динамические свойства;
- усилительные устройства 5 и 7;
- вычитающее устройство 8, формирующее сигнал ошибки в контуре местной обратной связи;
- исполнительное устройство 8, вырабатывающее управляющее воздействие r (t), прикладываемое к объекту регулирования;
- цепь корректирующей обратной связи 9, придающая системе требуемые динамические свойства;
- чувствительный элемент 10, воспринимающий изменение управляемой величины y(t);
- преобразователь сигнала 11, придающий управляемой величине форму, удобную для сравнения с задающим сигналом x(t).
Приведенная на рис. 1.3 функциональная схема является типовой, но лишь одной из возможных типовых схем соединения перечисленных устройств. Каждое из этих устройств может быть достаточно сложным и состоять в свою очередь из многих элементов.
Рассмотреть обзорно примеры построения подобной системы: авторулевой и система управления давлением пара. Пояснить назначение местной обратной связи.
Как видим, автоматические системы управления состоят из элементов, каждый из которых имеет определенное назначение.








