 2020-09-24
2020-09-24 113
113Автоматика – это
1. Отрасль науки и техники, разрабатывающая теорию и методы автоматизации производственных процессов (именно это подразумевается в нашей дисциплине). Теоретическая сторона дела изучалась в ТАУ. Мы будем изучать технические устройства.
2. Совокупность механизмов, приспособлений, действующих автоматически.
Автоматика в смысле первого определения близка к понятию «Техническая кибернетика». Наука об управлении техническими системами называется технической кибернетикой. Вообще кибернетика – это наука об общих закономерностях процессов управления и передачи информации в различных системах, будь то машины, живые организмы или общество. Разделами технической кибернетики являются теория информационных устройств, связанная со сбором, передачей и переработкой информации, необходимой для управления системой, и теория автоматического управления, связанная с управлением системой без непосредственного участия человека.
Напомним основные понятия из ТАУ.
Под автоматическим управлением понимается автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
Важнейшей разновидностью автоматического управления является автоматическое регулирование – поддержание постоянным или изменение по заданному закону некоторой величины, характеризующей процесс, осуществляемое путем определения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Сравнивая определения управления и регулирования, можно видеть, что задачи регулирования входят в состав задач управления. Но к задачам автоматического управления относятся также самонастройка системы управления в соответствии с изменением параметров объекта или внешних воздействий, формирование оптимальных управляющих воздействий, автоматический выбор наилучших режимов из нескольких возможных и другие, не входящие в круг задач автоматического регулирования.
Система автоматического управления или регулирования (САУ или САР) любой сложности состоит из управляемого объекта и автоматического управляющего устройства, взаимодействующих между собой.
Управляемым объектом называется техническое устройство (совокупность устройств), осуществляющее технический процесс, который нуждается в оказании специально организованных воздействий извне на исполнительный орган объекта для выполнения его алгоритма функционирования. Под алгоритмом функционирования понимается совокупность предписаний, ведущих к правильному выполнению технического процесса в каком-либо устройстве (или совокупности устройств).
К управляемым объектам можно отнести само судно, энергетическую установку, дизель, дизель-генераторы судовой электростанции и т. д.
Процессы, протекающие в разных объектах управления, характеризуются различными физическими величинами. Примерами таких величин могут служить напряжение на шинах судовой электростанции, частота вращения агрегатов, давление воздуха пусковых баллонов и т. д.
Управляемый объект, как правило, не способен самостоятельно противодействовать влиянию воздействий, оказываемых на него внешней средой. Поэтому осуществляется специальное воздействие извне на объект управления с целью получения требуемого значения некоторой физической величины, характеризующей процесс. Такая физическая величина называется управляемой.
Следовательно, алгоритм функционирования показывает, как должна изменяться управляемая величина в соответствии с требованиями нормального протекания технического процесса.
Состояние объекта управления определяется рядом величин, характеризующих как влияние на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого объекта. Эти величины могут быть контролируемыми, когда они измеряются в процессе работы, и неконтролируемыми, когда они влияют на режим работы объекта, но не измеряются. Величины, характеризующие влияние, оказываемое на объект извне, называются воздействиями.
Воздействия, вырабатываемые управляющим устройством (или задаваемые человеком), называются управляющими. Воздействия, не зависящие от системы управления, называются возмущениями. Возмущения могут быть двух видов: нагрузка или помехи. Наличие изменяющейся во времени нагрузки обусловлено работой объекта; от нее объект принципиально не может быть защищен.
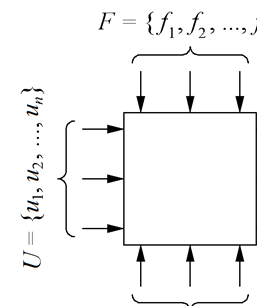 Величины, характеризующие воздействия на управляемый объект и его состояние, показаны на рис. 1.1. Совокупность управляющих воздействий обозначена вектором U = { u 1, u 2, …, un }, контролируемых возмущений – F = { f 1, f 2, …, fs }, неконтролируемых возмущений – G = { g 1, g 2, …, g r}, управляемых величин – Y = { y 1, y 2, …, ym }.
Величины, характеризующие воздействия на управляемый объект и его состояние, показаны на рис. 1.1. Совокупность управляющих воздействий обозначена вектором U = { u 1, u 2, …, un }, контролируемых возмущений – F = { f 1, f 2, …, fs }, неконтролируемых возмущений – G = { g 1, g 2, …, g r}, управляемых величин – Y = { y 1, y 2, …, ym }.
Воздействия передаются с использованием физических величин: напряжения, силы тока, давления воздуха, температуры, линейного и углового перемещений и др. Каждая из этих величин характеризуется количественным показателем: амплитудой, частотой, фазой, изменением частоты вращения вала и т.д.
В ТАУ широко используют также понятие сигнала. Термин «сигнал» в разных областях науки и техники понимают по-разному. Так, в теории информации и связи сигнал – это физический процесс, изменяемый в соответствии с передаваемой информацией. Мы будем понимать под сигналом процесс изменения во времени физической величины, учитываемый в системе управления (т.е. шире, чем в теории связи: так, напряжение силового источника ЭЭ, подаваемое на двигатель или угол поворота двигателя с точки зрения связи не сигнал, с нашей – да).
В соответствии с определениями системы автоматического управления и объекта управления можно сказать, что управление объектом связано с выработкой управляющего воздействия, при котором желаемое поведение объекта (управляемой величины) достигается независимо от изменений возмущающих воздействий. Управляющее воздействие создается автоматическим управляющим устройством, осуществляющим воздействие на управляемый объект в соответствии с заложенным в нем законом управления. В наиболее простых случаях автоматическое управляющее устройство называют регулятором.
 На рис. 1.2 представлена простейшая структурная схема автоматической системы с одной управляемой величиной y(t). Задаваемое на входе требуемое значение управляемой величины x(t) называется задающим воздействием системы.
На рис. 1.2 представлена простейшая структурная схема автоматической системы с одной управляемой величиной y(t). Задаваемое на входе требуемое значение управляемой величины x(t) называется задающим воздействием системы.








