 2020-09-24
2020-09-24 409
409Аннотация
Темой данной работы является возможность применения безредукторных синхронных приводов для запорной арматуры. Цель работы дать описание безредукторным синхронным приводам, показать их преимущества по массогабаритным и энергетическим показателям, основанных на сравнительном анализе различных приводов. Выразить специфику требований предъявляемых к электроприводам запорной арматуры, режим работы таких приводов, на основании чего обосновать целесообразность использования безредукторных синхронных приводов в конструировании запорной арматуры.
Содержание
Введение
Глава 1. Особенности прецизионного прямого электропривода
Устройство прецизионного прямого электропривода
Применение электроприводов для запорной арматуры
Недостатки механических систем с редуктором
Энергетические показатели
Глава 2. Требования, предъявляемые к электроприводам запорной арматуры
Моменты на маховике и скорость перемещения шпинделя запорной арматуры
Силовая характеристика арматуры
Возможность применения безредукторного синхронного электропривода
Заключение
Литература
Введение
Развитие и достижения естественных и технических (прикладных) наук и отраслей промышленности во многом связан с прогрессом в повышении точности технологических процессов и измерений. Современные сборочные и манипуляционные процессы требуют управление механическим движением с высокой точностью при относительно больших перемещениях, что является причиной широкого распространения следящих приводов. В зависимости от области применения следящего привода и условий работы к приводу могут предъявляться самые разнообразные требования. Общим требованием для следящего привода является способность воспроизводить входное воздействие, изменяющееся по заданному закону, в форме механического перемещения выходного вала; очевидно, что для выполнения этого требования следящий привод должен быть устойчив и обладать достаточной точностью и быстродействием. Заданным требованиям могут удовлетворять приводы, имеющие как различные схемы и методы управления, так и различные исполнительные элементы.
В современных следящих системах внедрены устройства управления и преобразования электрической энергии на основе цифровой техники, а элементы электропривода интегрированы с рабочим органом. При этом наилучшая гибкость управления механическим движением достигается за счет использования высокомоментного синхронного двигателя с само коммутацией (вентильного двигателя) и исключения из состава электропривода редуктора. Такой электропривод обычно называют безредукторным, или прямым, электроприводом с вентильным двигателем.
Термин «прямой электропривод» появился в 70-е годы ХХ в. Применительно к безредукторным электроприводам аудио- и видеоаппаратуры, в которой использовались синхронные машины малой мощности с самокоммутацией. Этот привод с прямым электромеханическим преобразованием получил распространение благодаря высокой стабильности частоты вращении, компактности и надежности, но занял довольно скромное место на рынке точных электроприводов до появления его более мощных версий. Развитие цифровой и силовой электроники, появление новых конструкций датчиков и синхронных машин позволило на другом уровне мощности и значительно точнее управлять прямым электромеханическим преобразованием. Так мощность отдельных образцов прямого электропривода возросли до сотен киловатт, а типичные значения погрешностей углового и линейного позиционирования уменьшились до единиц секунд и микрометров, что с полным правом позволило назвать такой привод прецизионным (высокоточным). Сфера применения прецизионного прямого электропривода теперь включает машиностроение, роботехнику, электронную индустрию, измерительную технику и специальные технические устройства.
ГЛАВА 1. ОСОБЕННОСТИ ПРЕЦИЗИОННОГО ПРЯМОГО ЭЛЕКТРОПРИВОДА
Устройство прецизионного прямого электропривода
Прецизионный прямой ЭП чаще всего оснащается вентильными двигателями (ВД), которые отличаются высокими удельными ускорениями и малыми пульсациями момента. Вентильный двигатель создается на основе синхронной машины без дополнительных пусковых и демпфирующих обмоток, работающей в режиме само коммутации за счет положительной обратной связи по положению ротора. Термин «вентильный двигатель» имеет двоякий смысл. Им обозначается либо совокупность устройств вместе с синхронной машиной, обеспечивающих реализацию указанного режима работы, либо синхронная машина, специально сконструированная для применения в составе ВД. Далее смысл термина легко раскрывается исходя из контекста.
Прецизионный прямой ЭП можно классифицировать как высокоточный ЭП с прямым (безредукторным) преобразованием электрической энергии в механическую на основе ВД. Электропривод состоит (рисунок 1) из:
· устройства управления, которое реализует функции управления, регулирования и измерения;
· вентильного двигателя, включающего электрический преобразователь ЭлП, электромеханический преобразователь - синхронную машину СМ и датчик положения ДП;
· рабочего органа.
«Слаботочная» часть системы управления и электрического преобразователя обычно называется контроллером, а «сильноточная» часть электрического преобразователя - инвертором. Назначение Устройства управления и электрического преобразователя - задание переменных состояния (например, момента, скорости, положения, токов, напряжений) электромеханического преобразователя (синхронной машины) и последующий расчет и формирование управляющих воздействий с учетом измеренных переменных состояния. Назначение электромеханического преобразователя (синхронной машины) - прямое (безредукторное) преобразование электрической энергии в механическую [1].
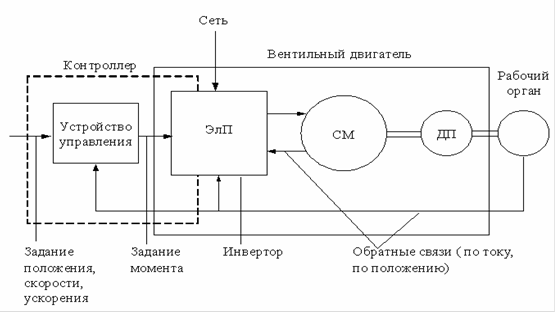
Рисунок 1 - Прецизионный прямой электропривод с вентильным двигателем
Принципиально термин «вентильный двигатель» относится к любой синхронной машине с синхронно-синфазным движением полей статора и ротора, которое обеспечивается токовым питанием в функции положения, или самокоммутацией. Наибольшее распространение получили следующие разновидности ВД:
· двигатели с синусоидальным токовым питанием в функции положения, или ВД переменного тока (ВДПТ) (англоязычный термин «brushless AC motor» - BLACM), которые подразделяются на:
вентильные двигатели с возбуждением от постоянных магнитов (ВДПМ) на базе синхронных машин с постоянными магнитами (СМПМ) или на базе редукторных машин с постоянными магнитами (РМПМ), которые также могут называться шаговыми гибридными;
реактивные вентильные двигатели (РВД) на базе реактивных синхронных машин (РСМ) или редукторных реактивных машин (PPM), которые также могут называться реактивными шаговыми;
· двигатели с несинусоидальным токовым питанием в функции положения,которые подразделяются на:
бесконтактные двигатели постоянного тока (БДПТ) с возбуждением от постоянных магнитов и трапециевидным токовым питанием (англоязычный термин «brushless DC motor» - BLDCM);
вентильно-индукторные двигатели (ВИД) - индукторные машины с трапециевидным токовым питанием (англоязычный термин «switched reluctance motor» - SRM).
Анализ регулировочных свойств отмеченных типов электрических машин привел к выводу о предпочтительном использовании в прецизионном прямом ЭП двух- или трехфазного ВДПТ: с машинами типа СМПМ либо типа PPM.
У СМПД преобразование электрической энергии в механическую происходит за счет взаимодействия двух групп намагниченных материалов. У РРМ преобразование энергии происходит вследствие действия магнитного поля на ферромагнитный материал. Конструктивно наиболее просты РРМ, поскольку обмотки у них размещены только на статоре, а ротор выполняется из электротехнической стали. Однако в создании момента этого двигателя участвует только часть основного магнитного потока, модулированного за счет изменения магнитной проницаемости рабочего зазора в функции угла поворота ротора. Это приводит к увеличению объема активных материалов, росту электромагнитной инерционности и малым рабочим зазорам, что затрудняет использование реактивной машины. Поэтому при проектировании динамичных и высокоточных ЭП предпочтение отдается машинам с возбуждением от постоянных магнитов [2].
Пример построения электромеханических преобразователей для вращающихся и линейных прямых электроприводов на базе синхронной машины с возбуждением от постоянных магнитов показан на рисунке 2. За основу принята конструкция синхронной машины с возбуждением от постоянных магнитов, которая разрезается вдоль оси и разворачивается в плоскости. Вращающееся поле машины при этом преобразуется в бегущее, а машина становится линейной - получается линейный синхронный двигатель. Если провести топологическое преобразование дальше и свернуть якорь и статор линейной машины вокруг продольной оси, то получится цилиндрический линейный синхронный двигатель, используемый в основном на малых ходах. Если требуются высокий момент и относительно низкая скорость, что типично для прямых прецизионных электроприводов, то удлинив развертку статора и ротора прототипа и снова свернув их, можно получить так называемый моментный двигатель с отношением диаметра к длине, значительно большим единицы[5].
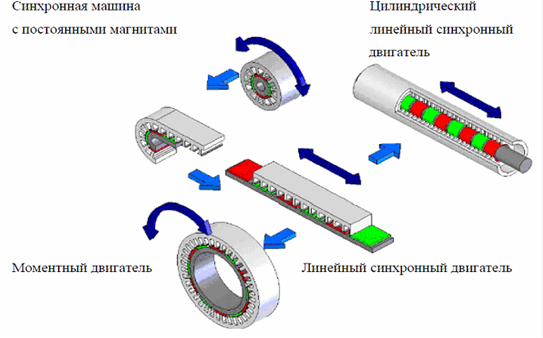
Рисунок 2 - Пример построения электромеханических преобразователей для вращающихся и линейных прямых прецизионных электроприводов








