 2020-09-24
2020-09-24 175
175
Для механизированного и автоматизированного управления трубопроводной арматурой применяются приводы различных типов (электрические, пневматические и гидравлические), однако наиболее распространены в настоящее время электрические. Это обусловлено следующими факторами:
· относительной простотой и гибкостью доставки электрической энергии к месту потребления;
· высоким коэффициентом полезного действия (КПД) электрических двигателей;
· большим количеством типов и практически неограниченным диапазоном мощности серийно выпускаемых электродвигателей;
· простотой реализации дистанционного и автоматического управления;
· приемлемой стоимостью электродвигателей.
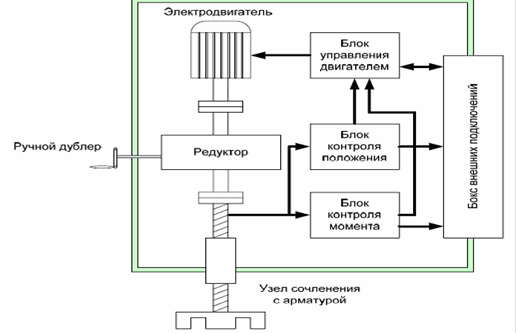
Рисунок 3 - Структура электрических приводов промышленной трубопроводной арматуры
При этом следует отметить, что оптимальные характеристики электродвигателей достигаются при частотах вращения ротора от нескольких сотен до нескольких тысяч оборотов в минуту. В то же время требуемая частота вращения приводного вала трубопроводной арматуры не превышает одного-двух десятков оборотов в минуту, а в некоторых случаях и вовсе может составлять доли оборота в минуту.
Для снижения частоты вращения до требуемого уровня в состав электропривода трубопроводной арматуры вводится механический редуктор, который, помимо этого, выполняет еще одну полезную функцию. Он повышает крутящий момент, прикладываемый к приводному валу трубопроводной арматуры. Общая структура типового электропривода представлена на рисунке 3.








