 2020-09-24
2020-09-24 299
2992.1 Механические и электромеханические характеристики электродвигателей.
Момент двигателя зависит от скорости. Взаимосвязь момента, развиваемого двигателем, и скорости M=j(w) определяет механические характеристики электродвигателя. Механические характеристики изображаются в поле координат «М-w». 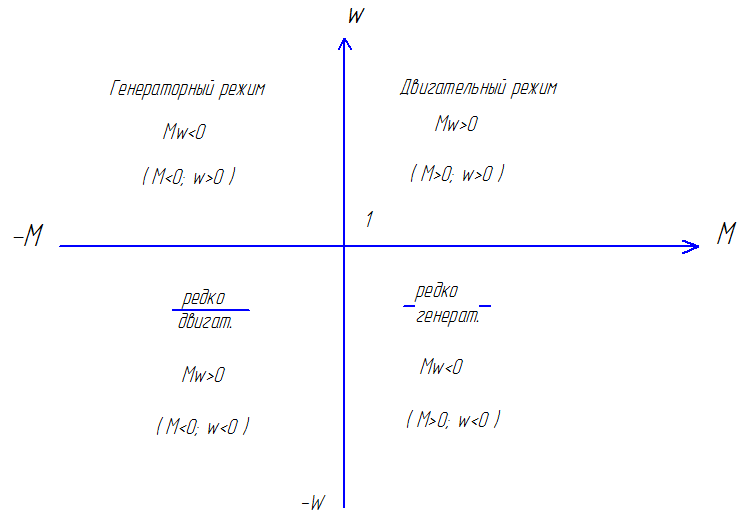
Обычно пользуются представлением механических характеристик в квадратах I и II.
Основным параметром, определяющим вид механической характеристики является жесткость ее, определяемая по формуле:
b=  ≈
≈ 
где  - приращение момента,
- приращение момента,
 - приращение скорости.
- приращение скорости.
Если механическая характеристика прямолинейна (1), то ее жесткость – величина постоянная, равная тангенсу угла наклона характеристики к оси ординат:
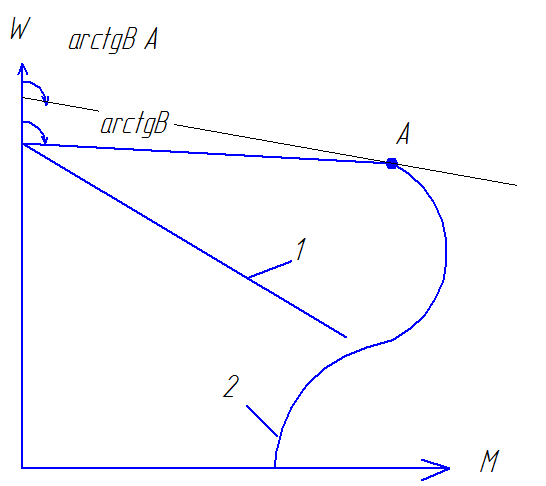
1-механическая характеристика прямолинейна
2- криволинейная механическая характеристика
Если характеристика криволинейная (2), то жесткость определяется тангенсом угла наклона касательной к технической характеристике в данной точке (например, А).
Жесткость характеризует способность двигателя воспринимать приложение нагрузки (момента) на его валу.
Поскольку обычно с увеличением момента нагрузки скорость уменьшается, то жесткость является величиной отрицательной.
Если при положении нагрузки скорость уменьшается незначительно, то механическая характеристика считается жесткой.
Если при том же значении прикладываемой нагрузки скорость изменяется значительно, то такую характеристику называют мягкой.
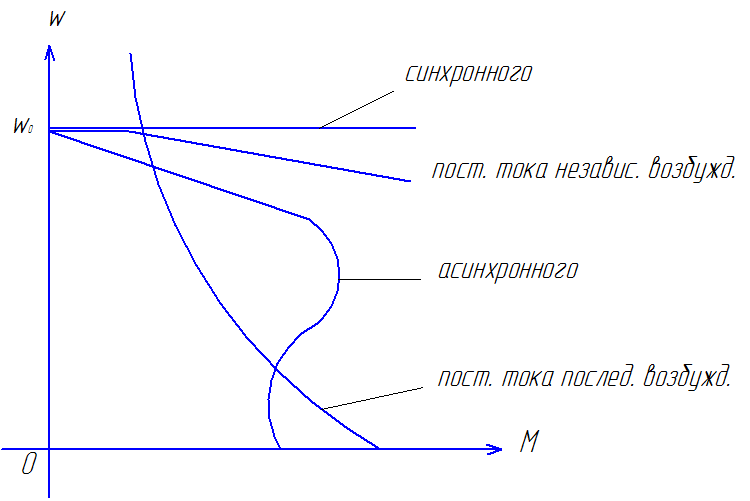
Естественные механические характеристики двигателей
Искусственные (или регулировочные) механические характеристики получаются, когда в целях регулирования изменяются параметры питающего напряжения или в цепи обмоток вводятся дополнительные элементы (активное или индуктивные сопротивления, полупроводниковые приборы.
Пользуясь выражением для момента асинхронного двигателя
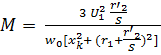 (1)
(1)
Где U1 –напряжение статора
S – относительное скольжение
S =  где w0 -скорость поля статора
где w0 -скорость поля статора
 - скорость поля ротора
- скорость поля ротора
r2¢=r2*kT2 – приведенное сопротивление цепи ротора к обмотке статора с учетом коэффициента трансформации
kT = U1 /E2H
где E2H –номинальная фазная ЭДС ротора
E2H =V1/KT
Xk – индуктивное сопротивление короткого замыкания
Xk = X1+X¢2H
X¢2H индуктивное сопротивление обмотки ротора при S=1, а X¢2H =X2*K2T индуктивное сопротивление обмотки ротора приводимое к обмотке статора
X2s=1 = X2H
r1 – активное сопротивление обмотки статора
Строим механическую характеристику асинхронного двигателя S=f(M)
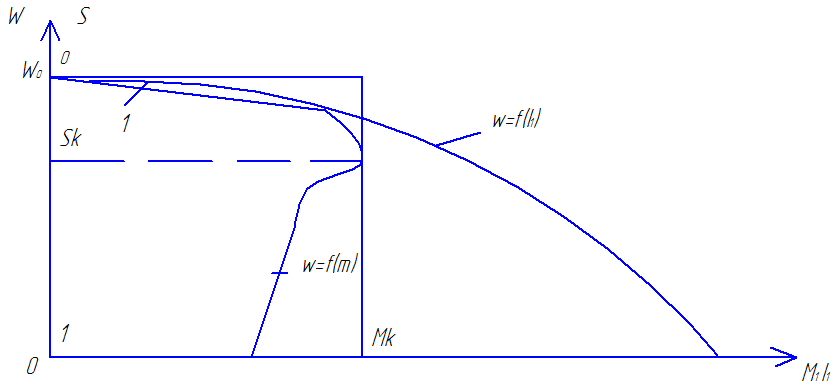
Механическая (1) и электромеханическая (2) характеристики асинхронного двигателя с фазным ротором, замкнутым накоротко.
Электромеханическая характеристика w=f(I1 ) определяется из векторной диаграммы асинхронного двигателя (упрощенный)
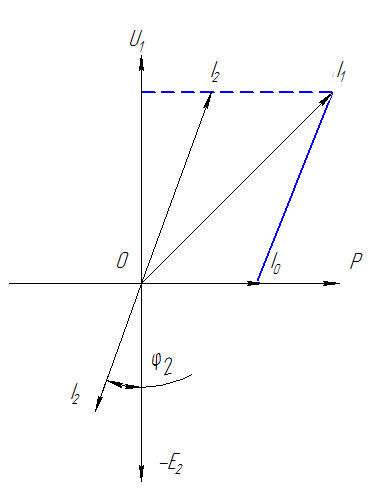
Пологая ток намагничивания реактивным, получим
 =
= 
Где  =
= 
Полагая dm/ds = 0 найдем максимальный крутящий момент асинхронного двигателя
Mk= 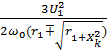 (2)
(2)
И соответствующее ему критическое скольжение Sk
(3) Sk =± r2 /  +к двигательному режиму: - к генераторному режиму
+к двигательному режиму: - к генераторному режиму
Отношение максимального момента к номинальному называется перегрузочной способностью асинхронного двигателя λ=Мк/Мн (4)
С учетом (2) и (4) формула (1) может быть преобразована к более удобному для пользования выражению – формуле Клосса M=2Mk(1+aSk)/(Sk/S+S/Sk+2aSk) (5)
где a=r1/r¢2
2.2 Пуск асинхронного двигателя с фазным ротором
Для пуска асинхронного двигателя с фазным ротором нужно принять меры для увеличения пускового момента и снижения пусковых токов. С этой целью цепь ротора включают добавочное активное сопротивление. Как следует из формул (2) и (3) введение добавочного активного сопротивления не изменяет максимального момента двигателя, а лишь изменяет критическое скольжение
Sk=(r¢2+R¢2д)/Xk ,где R¢2д –приведенная к статору добавочное сопротивление в цепи ротора.
Введение добавочного активного сопротивления увеличивает полное сопротивление роторной цепи в результате уменьшается пусковой ток и увеличивается cosj2 роторной цепи, в следствии, этого увеличивается активная сопротивляющая тока ротора и пусковой момент двигателя.
Обычно в роторную цепь с фазным ротором вводят секционированный резистор, ступени которого перемыкают пусковыми контакторами
Электросхема электропривода вентилятора
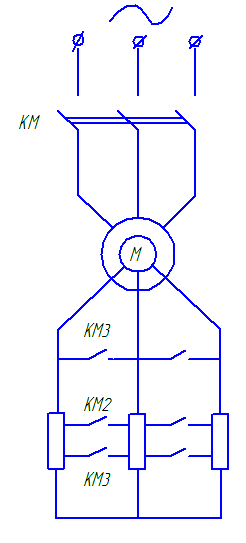
При пуске двигателя сначала вводят полное добавочное сопротивление R1доб. По достижению скорости, при которой момент двигателя М1 становиться близким к моменту сопротивления Mc часть пускового резистора шунтируют контактором КМ1 и двигатель переходит на характеристику, соответствующую добавочному сопротивлению R2доб. По мере дальнейшего разгон двигателя контактором КМ2 закорачивается вторая ступень пускового резистора. После замыкания контактов контактора КМ3 двигатель переходит на естественную характеристику и будет работать со скоростью соответствующей т.1
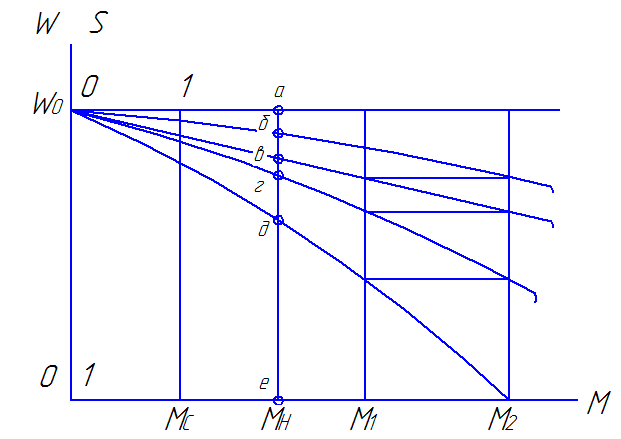
Добавочные сопротивления легко определить графически. Проведем линию номинального момента двигателя и отметим точки пересечения этой линии с механическими характеристиками. Отрезки, заключенные между точками будут пропорциональны сопротивлениям ступеней.
Полное сопротивление добавочного резистора
Rдоб=R2н (бg/ae)
Сопротивление первой ступени резисторов
RIдоб - R2доб = R2H (2g/ae)
Сопротивление второй ступени резистора
R2доб – R3доб = R2н(Вg/2e)
Сопротивление третьей ступени резистора
R3доб = R2н ( бв/ае)
Отрезок аб пропорционален сопротивлению обмотки фазы ротора p2= R2H (аб/ас)
R2Н – номинальное сопротивление ротора
R2н = Е2Н лин/  I2н
I2н
где Е2Н лин - линейная ЭДС ротора при S=1
I2н – номинальный ток ротора








