 2020-10-10
2020-10-10 467
467Активные преобразователи сопротивлений (импедансов) – это устройства, позволяющие изменять значение или характер сопротивлений (проводимостей) пассивных двухполюсных элементов – резисторов, емкостей, индуктивностей, подключаемых в качестве нагрузки к выходу активного четырехполюсника (рис. 5.9). Если при этом осуществляется преобразование
 , (5.9)
, (5.9)
где g – вещественный положительный коэффициент, то мы имеем конвертор импеданса, если же
 , (5.10)
, (5.10)
где ZГ – сопротивление гирации (инверсии) – инвертор импеданса. Аналогично определяются конверторы и инверторы проводимостей (адмитансов).

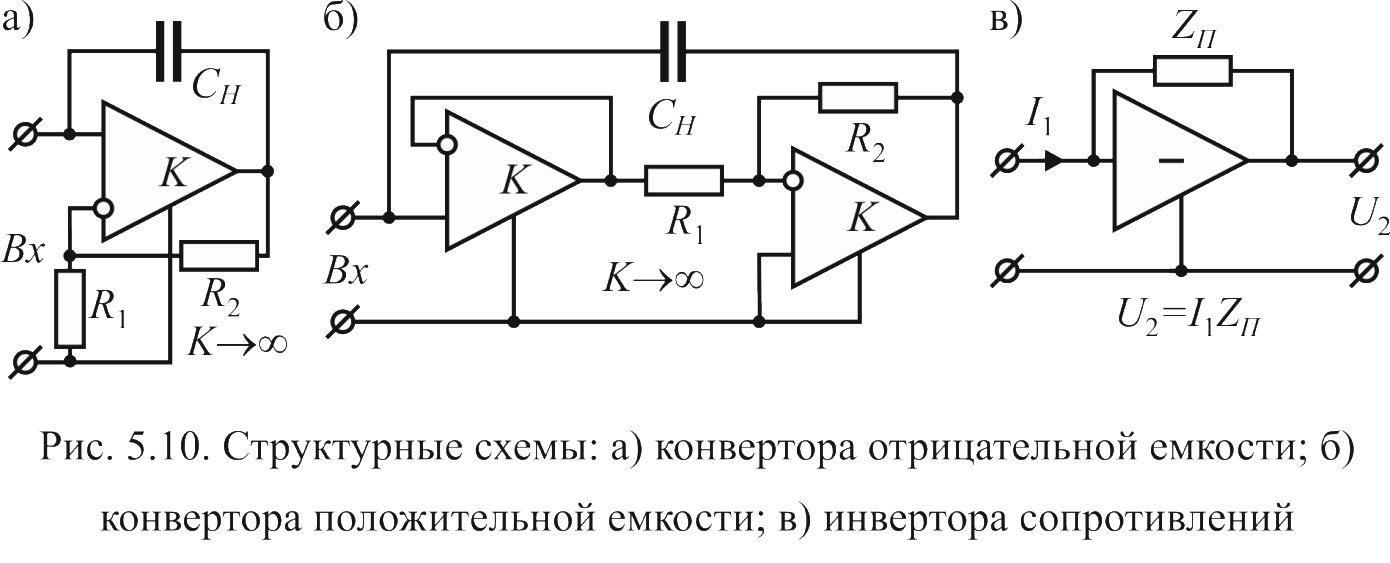
Наиболее легко преобразователи сопротивлений реализуются на управляемых источниках напряжения или тока, чаще всего с использованием ОУ. Так, например, на усилителе с положительным усилением достаточно просто получается конвертор отрицательной ( , рис. 5.10 а), а на усилителе с отрицательным усилением – конвертор положительной (
, рис. 5.10 а), а на усилителе с отрицательным усилением – конвертор положительной ( , рис. 5.10 б) емкости, иногда называемые умножителями С. Для построения инверторов сопротивлений обычно используется встречно–параллельное включение двух ИТУН или одиночная схема ИНУТ, иногда выполняемая на ОУ (рис. 5.10 в). Основным недостатком подобных схем преобразователей импеданса является их потенциальная неустойчивость, т.е. склонность к самопроизвольному возбуждению.
, рис. 5.10 б) емкости, иногда называемые умножителями С. Для построения инверторов сопротивлений обычно используется встречно–параллельное включение двух ИТУН или одиночная схема ИНУТ, иногда выполняемая на ОУ (рис. 5.10 в). Основным недостатком подобных схем преобразователей импеданса является их потенциальная неустойчивость, т.е. склонность к самопроизвольному возбуждению.
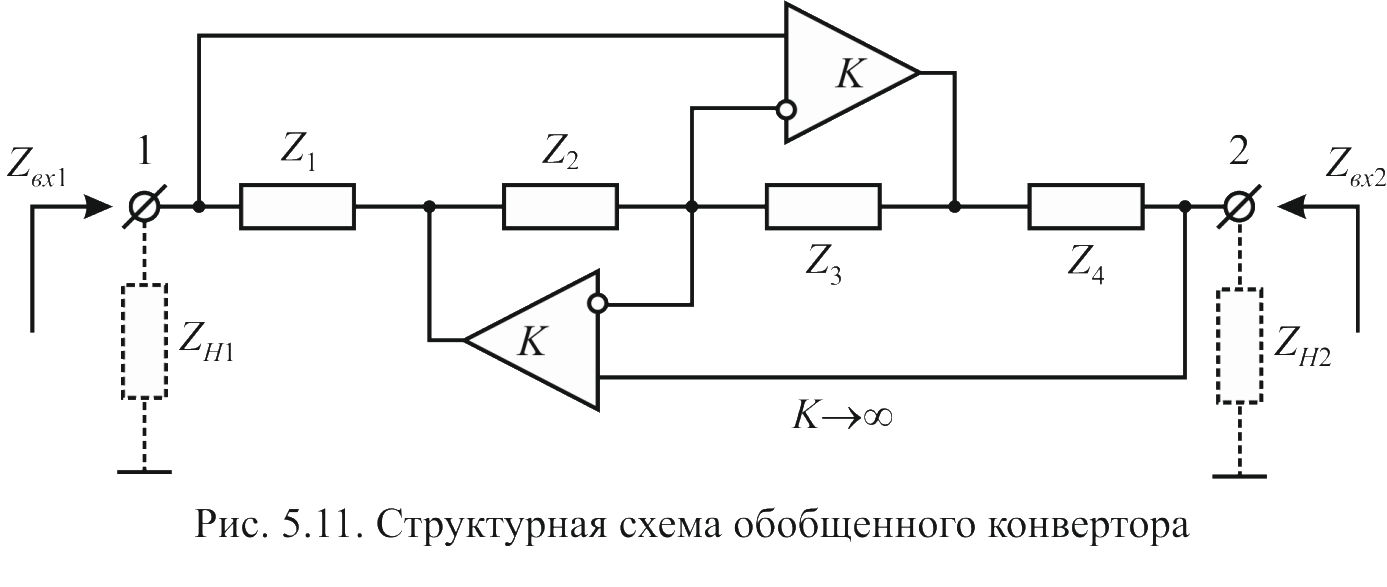
Оптимальным образом свойства активных преобразователей отражены в схеме обобщенного конвертора (ОК, рис. 5.11), который преобразует сопротивление нагрузки согласно
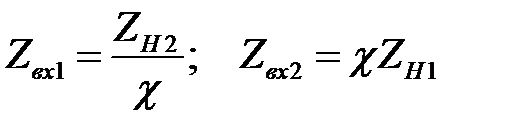 , где
, где  – коэффициент конверсии. (5.11)
– коэффициент конверсии. (5.11)
Получаемые значения Zвх могут быть пропорциональны p 0(R), p (L), p -1(C), p 2(супериндуктивность), p -2(суперемкость), где супериндуктивность и суперемкость на самом деле – варианты частотозависимых отрицательных сопротивлений.
Вариант использования суперемкости при имитации LC – прототипа методом частотного преобразования элементов уже обсуждался выше (см. рис. 5.8), для ее реализации в схеме ОК достаточно положить  , что обеспечит пропорциональность
, что обеспечит пропорциональность  величине р -2. Применение супериндуктивности в имитационных структурах встречается гораздо реже, поскольку практические схемы ее реализации более склонны к самовозбуждению, чем схемы суперемкости.
величине р -2. Применение супериндуктивности в имитационных структурах встречается гораздо реже, поскольку практические схемы ее реализации более склонны к самовозбуждению, чем схемы суперемкости.
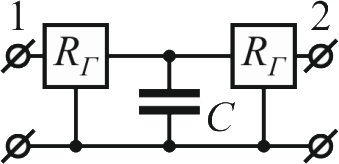
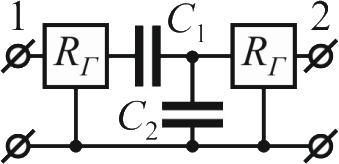
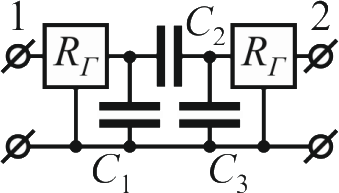
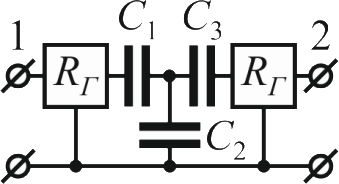
При элементной имитации индуктивностей чаще используют гираторные схемы на основе специализированных ИС гираторов, при этом для уменьшения их числа в LC – прототипах выделяют соответствующие Г –, П –, Т – структуры соединения L (табл. 5.2), где для всех конфигураций  . Лучшие образцы ИС гираторов имеют следующие параметры:
. Лучшие образцы ИС гираторов имеют следующие параметры:
- сопротивление гирации RГ = 30…300 кОм;
- диапазон рабочих частот fp = 0,01…10 МГц;
- эквивалентная добротность имитируемой индуктивности QЭ = 30…100;
- динамический диапазон входных сигналов ДД = 60…70 дБ;
- потребляемая мощность Рпотр = 10…5 мВт.
Таблица 5.2.
| NN п/п | Исходная схема | Гираторный эквивалент |
| 1 | 
| 
|
| 2 | 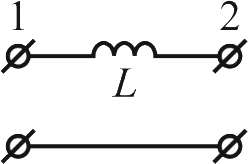
| 
|
| 3 | 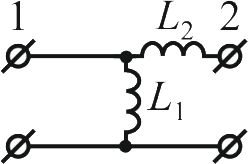
| 
|
| 4 | 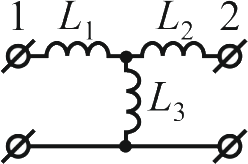
| 
|
| 5 | 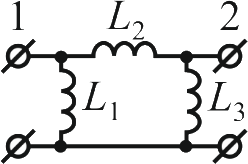
| 
|








