 2020-10-12
2020-10-12 122
122Рассмотрим САУ хлебопекарной печи (рис.1). Ее принципиальная схема показывает принцип действия данной конкретной САУ, состоящей из конкретных технических устройств. Принципиальные схемы могут быть электрическими, гидравлическими, кинематическими и т.п.
Технология выпечки требует изменения температуры в печи по заданной программе, в частном случае требуется поддержание постоянной температуры. Для этого надо реостатом регулировать напряжение на нагревательном элементе НЭ. Подобная часть ОУ, с помощью которой можно изменять параметры управляемого процесса называется управляющим органом объекта (УО). Это может быть реостат, вентиль, заслонка и т.п.
Часть ОУ, которая преобразует управляемую величину в пропорциональную ей величину, удобную для использования в САУ, называют чувствительным элементом (ЧЭ). Физическую величину на выходе ЧЭ называют выходной величиной ОУ. Как правило, это электрический сигнал (ток, напряжение) или механическое перемещение. В качестве ЧЭ могут использоваться термопары, тахометры, рычаги, электрические мосты, датчики давления, деформации, положения и т.п. В нашем случае это термопара, на выходе которой формируется напряжение, пропорциональное температуре в печи, подаваемое на измерительный прибор ИП для контроля. Физическую величину на входе управляющего органа ОУ называют входной величиной ОУ.
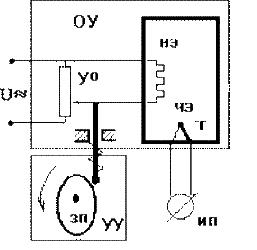
Рис.1.
Рассмотренную САУ можно представить в виде функциональной схемы, элементы которой называются функциональными звеньями. Эти звенья изображаются прямоугольниками, в которых записывается функция преобразования входной величины в выходную (рис.2). Эти величины могут иметь одинаковую или различную природу, например, входное и выходное электрическое напряжение, или электрическое напряжение на входе и скорость механического перемещения на выходе и т.п.
Величина f(t), подаваемая на второй вход звена, называется возмущением. Она отражает влияние на выходную величину y(t) изменений окружающей среды, нагрузки и т.п.
В общем случае функциональное звено может иметь несколько входов и выходов (рис.3). Здесь u1,u2,...,un - входные (управляющие) воздействия; f1,f2,...,fm - возмущающие воздействия; y1,y2,...,yk - выходные величины
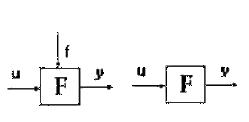
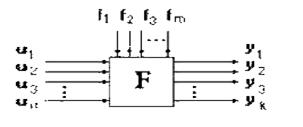
Рис. 2. Рис. 3.
Принцип работы функциональных звеньев может быть различным, поэтому функциональная схема не дает представление о принципе действия конкретной САУ, а показывает лишь пути прохождения и способы обработки и преобразования сигналов. Сигнал - это информационное понятие, соответствующее на принципиальной схеме физическим величинам. Пути его прохождения указываются направленными отрезками (рис.4). Точки разветвления сигнала называются узлами. Сигнал определяется лишь формой изменения физической величины, он не имеет ни массы, ни энергии, поэтому в узлах он не делится, и по всем путям от узла идут одинаковые сигналы, равные сигналу, входящему в узел. Суммирование сигналов осуществляется в сумматоре, вычитание - в сравнивающем устройстве.
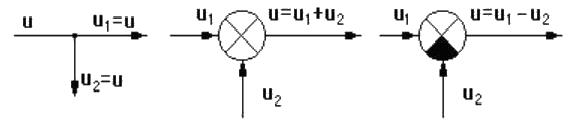
Рис. 4.
Рассмотренную САУ хлебопекарной печи можно изобразить функциональной схемой (рис.5). В данной схеме заложен принцип разомкнутого управления, сущность которого состоит в том, что программа управления жестко задана ЗУ; управление не учитывает влияние возмущений на параметры процесса.
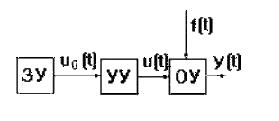
Рис.5.
Принцип компенсации
Если возмущающий фактор искажает выходную величину до недопустимых пределов, то применяют принцип компенсации (рис.6, КУ - корректирующее устройство).
Пусть yо - значение выходной величины, которое требуется обеспечить согласно программе. На самом деле из-за возмущения f на выходе регистрируется значение y. Величина e = yо - y называется отклонением от заданной величины. Если каким-то образом удается измерить величину f, то можно откорректировать управляющее воздействие u на входе ОУ, суммируя сигнал УУ с корректирующим воздействием, пропорциональным возмущению f и компенсирующим его влияние.
Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. На рис.6 в цепи НЭ стоит термосопротивление R t, величина которого меняется в зависимости от колебаний температуры окружающей среды, корректируя напряжение на НЭ.
Достоинство принципа компенсации: быстрота реакции на возмущения. Он более точен, чем принцип разомкнутого управления. Недостаток: невозможность учета подобным образом всех возможных возмущений.
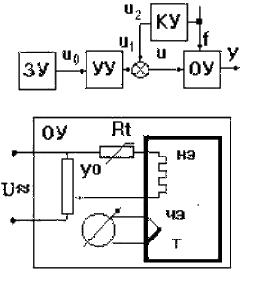
Рис. 6.








