 2014-02-04
2014-02-04 1466
1466Данный принцип впервые предложен Ползуновым в 1765 году, а затем Вуатом, поэтому этот принцип наз-ся принципом Ползунова-Вуата. Ранее отмечалось, что основной задачей автоматического регулирования явл-ся выполнение равенства регулируемой величины по заданному з-ну ее изменения. Следовательно, в любой момент времени функционирования объекта регулирования можно определить ошибку по разности регулируемой величины, и величины полученной согласно з-на изменения регулируемой величины. Очевидно, чем меньше эта ошибка, тем лучше работает сис-ма регулирования. Если в качестве требуемого з-на регулирования используется постоянная величина, то оценка качества работы сис-мы определяется по отношению, которое явл-ся величиной обратной по знаку ошибки. Если закон регулирования имеет сложный вид, то отклонение как критерий качества работы регулятора не используется.
Таким образом, мы должны иметь равенство:
 - ошибка.
- ошибка.
Чем  , тем лучше работает сис-ма регулирования.
, тем лучше работает сис-ма регулирования.
Если  , то используют отклонение
, то используют отклонение  .
.
Идея, лежащая в основе принципа регулирования по ошибке состоит в следующем:
Тем или иным способом определяется ошибка сис-мы автоматического регулирования. В зависимости от величины и знака этой ошибки, осуществляется регулирующее воздействие на объект регулирования, стремящиеся свести ошибку к нулю. Тем самым обуславливает изменение регулируемой величины по требуемому з-ну. Принципиальная схема сис-мы автоматического регулирования представляется следующим образом:
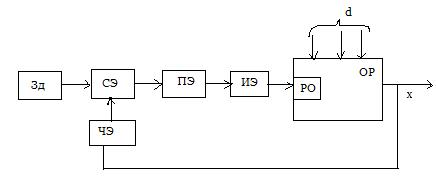
ИЭ – исполнительный эл-нт.
ЧЭ – чувствительный эл-нт.
ПЭ – преобразующий эл-нт.
Задающий эл-нт служит для формирования воздействия определяемого требуемым з-нам регулирования. Чувствительный эл-нт служит для изменения регулируемой величины. Сравнивающий эл-нт служит для определения величины и знака ошибки. Таким образом, на выходе сравнивающего эл-та образуется сигнал ошибки, характеризующий истинное значение изменения от текущего значения.
Зависимость регулирующего сигнала от сигнала ошибки без учета инерционности регулятора наз-ют з-ном регулирования.
Основным преимуществом сис-м автоматического регулирования, работающих по ошибке явл-ся их способность выполнять задачу регулирования при любом числе возмущений, т.е. в данном случае совершенно не важно по каким причинам из-за каких конкретных возмущений вызвано отклонением от регулируемой величины. Сис-ма регулирует сам факт появления ошибки и принимает меры для ее ликвидации.
Вторым преимуществом сис-м автоматического регулирования, работающих по ошибке, явл-ся отсутствие жестких требований к стабильности хар-к эл-ов регулятора и объектов регулирования. Это объясняется тем, что изменение указанных хар-к, в конечном счете, приводит к возникновению ошибки, т.е. в конечном счете, возникает ошибка регулируемой величины, которая фиксируется в сис-ме и принимает меры для ликвидации ошибки. Однако это никаким образом не относится к тем эл-ам, которые участвуют в выявлении ошибки и в выработки сигнала для управления, т.е. к чувствительному эл-те, задатчику и сравнивающему эл-ту. Эти преимущества сис-м автоматического регулирования, работающих по ошибке, объясняются наличием в них обратной связи.
Под обратной связью в данном случае понимают подачу сигнала с выхода эл-та сис-мы на его вход. Если сигнал обратной связи складывается с входным сигналом, то обратная связь наз-ся положительной, если вычитается – то обратная связь наз-ся отрицательной.
В рассматриваемом типе сис-м автоматического регулирования мы имеем отрицательную обратную связь. Основным недостатком сис-м данного типа, явл-ся противоречивость самого принципа регулирования т.к. реагирующее воздействие, направленное на ликвидацию ошибки, появляется только в том случае, когда эта ошибка появилась. Тоесть, прежде чем ликвидировать ошибку необходимо допустить ее возникновение.
Вторым недостатком, как и в схемах с обратной связью явл-ся то, что замкнутые сис-мы по своей природе склонны к колебаниям.

