 2014-02-02
2014-02-02 503
503Рис. 2.26
Активное сопротивление обмотки статора R1 синхронных микродвигателей в отличие от синхронных двигателей большой мощности соизмеримо с индуктивными сопротивлениями Xd и Xq. Поэтому существенная часть потребляемой мощности теряется на сопротивлении R1.
Рис. 2.25
Электромагнитный момент создается в результате взаимодействия вращающегося поля статора с полем возбуждения ротора, которые вращаются с одинаковой угловой скоростью, равной угловой скорости ротора.
СИНХРОННЫЕ МИКРОДВИГАТЕЛИ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ
ЛЕКЦИЯ №11
В синхронных микродвигателях с постоянными магнитами наиболее распространенными являются роторы с радиальным (рис. 2.25, а) и аксиальным (рис. 2.25, б) расположением постоянных магнитов и короткозамкнутой обмотки.
Ротор состоит из двух основных частей:
а) постоянных магнитов 1, создающих магнитный поток возбуждения ротора и обеспечивающих возникновение электромагнитного момента в синхронном режиме;
б) короткозамкнутой обмотки типа «беличья клетка» 3, уложенной в сердечник 2 из электротехнической стали и обеспечивающей возникновение электромагнитного момента в процессе асинхронного пуска.
Электромагнитный момент синхронного микродвигателя в синхронном режиме в случае симметричной магнитной цепи и при незначительном активном сопротивлении обмотки статора определяется уравнением, известным из общей теории синхронных машин активного типа:
 , (2.29)
, (2.29)
где m1 – число фаз статора; U1 – фазное напряжение на зажимах обмотки статора; E0 – э.д.с, наводимая магнитным потоком ротора в обмотке фазы статора; ω1 = 2πf1/p – синхронная угловая скорость (f1 – частота напряжения питания; p – число пар полюсов машины); XC – синхронное индуктивное сопротивление обмотки статора; θu – сдвиг по фазе (во времени) между векторами U1 и E0.

Угол θu численно равен электрическому пространственному углу между результирующим вектором напряжения статора и поперечной осью q ротора. Результирующий вектор напряжения статора представляет собой пространственный вектор, проекциями которого на оси обмоток фаз статора являются мгновенные значения соответствующих фазных напряжений. Если принять, что активное сопротивление обмотки статора R1 = 0, то θu равен углу между осью полюсов ротора и результирующим магнитным потоком машины.
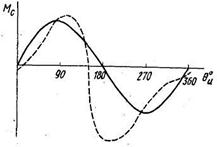
Угол θu в синхронном режиме зависит от момента сопротивления на валу двигателя. Угловая характеристика, соответствующая уравнению (2.29), изображена на рис. 2.26 (сплошная линия).
В реальных синхронных микродвигателях с постоянными магнитами магнитная система несимметрична: индуктивные сопротивления обмотки статора по продольной Xd и поперечной Xq осям машины не равны. Это наглядно выражено у микродвигателей радиальной конструкции (см. рис. 2.25, а), в которых магнитное сопротивление ротора по продольной оси d больше, чем по поперечной q, вследствие малой магнитной проницаемости материала постоянных магнитов 1 по сравнению с электротехнической сталью 2.
Оба указанных фактора влияют на значение электромагнитного момента MC и характер его зависимости от угла θu. В синхронном микродвигателе активного типа основной является составляющая момента, соответствующая взаимодействию полей статора и ротора,

 (2.30)
(2.30)
при R1 = 0 выражение для момента Mосн обращается в (2.29). Появляется постоянная составляющая момента
 , (2.31)
, (2.31)








