 2014-02-05
2014-02-05 1007
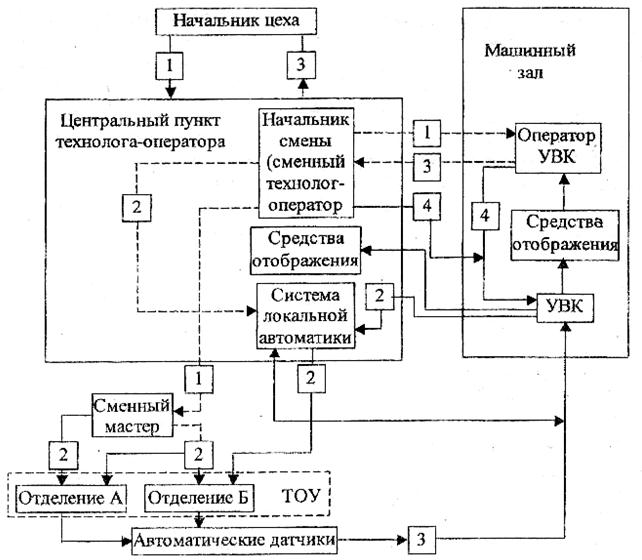
1007Рис.5.12. Типовая структура СЦКРиУ с многоканальными средствами контроля и регулирования
Рис.5.8.Определение статических ошибок в статических и астатических системах
Рис.5.7.Структурные схемы САР
Рис.5.6.Структурные схемы САР
Рис.5.2.Схема автоматического регулирования температуры
Рис.5.1.Система автоматического регулирования с корректирующими устройствами
Регулятор, как правило включает в себя такие основные элементы, как элемент сравнения, усилитель, исполнительный элемент и корректирующие устройства. На основании изложенного структурная схема САР в общем виде может быть представлена на рис.5.1, где на объект О действует возмущение  и выходной сигнал
и выходной сигнал  исполнительного органа ИО. Регулируемая величина
исполнительного органа ИО. Регулируемая величина  и управляющее воздействие
и управляющее воздействие  преобразуется измерительным элементом ИЭ и задающим элементом ЗЭ соответственно с тем расчётом, чтобы их можно было сравнить на элементе сравнения ЭС и полученную разность
преобразуется измерительным элементом ИЭ и задающим элементом ЗЭ соответственно с тем расчётом, чтобы их можно было сравнить на элементе сравнения ЭС и полученную разность  использовать для осуществления процесса регулирования. Сигнал ошибки
использовать для осуществления процесса регулирования. Сигнал ошибки  проходит через усилители У1 и У2 и затем попадает на исполнительный орган. На схеме указаны корректирующие элементы, включённые последовательно (КЭ1) и параллельно (КЭ2 и КЭ3). Параллельные корректирующие элементы могут включаться в цепь местной (внутренней) обратной связи (элемент КЭ3). Кроме того, параллельные корректирующие устройства могут образовывать прямые связи (элемент КЭ2). По цепи ab осуществляется главная отрицательная обратная связь.
проходит через усилители У1 и У2 и затем попадает на исполнительный орган. На схеме указаны корректирующие элементы, включённые последовательно (КЭ1) и параллельно (КЭ2 и КЭ3). Параллельные корректирующие элементы могут включаться в цепь местной (внутренней) обратной связи (элемент КЭ3). Кроме того, параллельные корректирующие устройства могут образовывать прямые связи (элемент КЭ2). По цепи ab осуществляется главная отрицательная обратная связь.
Рассматриваемая структурная схема может представлять все три группы систем, т.е. системы автоматической стабилизации, следящие системы и системы программного регулирования.. Принципиальной разницы между этими системами по применению и назначению элементов нет. Есть некоторое различие в задающем элементе. Задающий элемент в системе автоматической стабилизации вырабатывает управляющее воздействие постоянной величины, которое называется уставкой регулятора и с которой сравнивается регулируемая величина при работе системы. При работе схемы в режиме следящей системы задающий элемент должен обеспечить измерение управляющего сигнала, поступающего на следящую систему извне.
Таким образом, в общем случае в состав автоматического регулятора входят следующие функциональные блоки: воспринимающий, задающий, исполнительный (обяза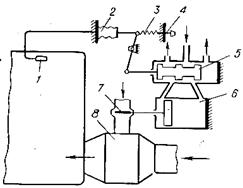 тельный), преобразующий и усиливающий (по мере надобности). Кроме того для улучшения динамических свойств системы и повышения точности работы в состав регулятора ещё могут включаться блоки фиксации (блоки памяти), стабилизирующие и корректирующие блоки и пр.
тельный), преобразующий и усиливающий (по мере надобности). Кроме того для улучшения динамических свойств системы и повышения точности работы в состав регулятора ещё могут включаться блоки фиксации (блоки памяти), стабилизирующие и корректирующие блоки и пр.
Рассмотрим схему САР служащую для автоматического поддержания в камере постоянной температуры (рис.5.2) В камере установлен баллон 1 парового манометрического термометра, капилляр которого введён в гармониковую мембрану 2 (сильфон). Её свободное донышко перемещается в зависимости от давления пара в баллоне, а следовательно, и от температуры в камере. Этому перемещению противодействует сила сжатия пружины 3, предварительное натяжение которой создаётся винтом 4. Деформация сильфона вызывает (через рычаг) перемещение золотника 5, управляющего поступлением воздуха в полость рабочего цилиндра 6. Поршень последнего связан с клапаном 7 на линии пара, который в калорифере 8 нагревает поступающий в камеру воздух.
Когда температура в камере равна заданной, сигнал ошибки (пропорциональный разности усилий на донышке сильфона) равен нулю и золотник находится в нейтральном положении: поступление воздуха в рабочий цилиндр прекращено, паровая задвижка неподвижна. Настройка регулятора в это положение осуществляется посредством винта. Если температура в камере превосходит заданную, то образуется сигнал ошибки, а золотник – влево (это положение на схеме). При этом доступ воздуха в правую полость рабочего цилиндра, в результате чего поршень переместится влево и прикроет подход для греющего пара. Это вызовет понижение температуры воздуха, поступающего в камеру. Падение температуры в камере приведёт, наоборот, к увеличению прохода для греющего пара.
В данным случае воспринимающим блоком является манометрический термометр (баллон – сильфон), задающим – пружина с винтом, сравнивающим – сильфон с пружиной, управляющим – золотник, исполнительным – поршень цилиндра с регулирующим органом. В исполнительном блоке преобразуется входное воздействие (вызванное перемещением золотника) в давление воздуха и затем в перемещение поршня с задвижкой.
Часто одно устройство выполняет несколько функций. Например, воспринимающий блок, кроме основной функции, выполняет также функцию сравнения заданного и действительного значений параметра. Допустим, что паровпускная задвижка непосредственно связана рычажной системой с сильфоном, т.е. нет золотника и рабочего цилиндра. В этом случае сильфон непосредственно управляет задвижкой и, таким образом, является одновременно сравнивающим, управляющим и исполнительным блоком. Далее, допустим, что настройка регулятора осуществляется посредством набора сильфонов различной жёсткости, а пружины и винта нет. В этом случае сильфон одновременно служит сравнивающим, управляющим, задающим и исполнительным блоком.
Совмещение различных функций в одном элементе особенно ясно видно на примере биметаллического регулятора температуры при электронагревателе. Здесь биметаллическая пластинка включена в цепь нагрева и при увеличении температуры выше заданной изгибается настолько, что размыкает питающий ток. Следовательно, эта пластина одновременно воспринимающим, задающим (если нет специального устройства настройки), сравнивающим, управляющим и исполнительным блоком и регулирующим органом.
Автоматическая система после осуществления заданных управляющих воздействий на процесс для подготовки себя к повторному действию может потребовать вмешательства человека или обойтись без него. Автоматическая система в первом случае называется однократной, во втором – многократной.
Воздействие, приложенное к САР (САУ), вызывает изменение регулируемой величины. Изменение регулируемой величины во времени определяет переходный процесс, характер которого зависит от воздействия и от свойств системы.
Является ли система следящей системой, на выходе которой нужно воспроизвести как можно более точно закон изменения управляющего сигнала, или системой автоматической стабилизации, где независимо от возмущений регулируемая величина должна поддерживаться на заданном уровне, переходный процесс представляется динамической характеристикой, по которой можно судить о качестве работы системы.
Любое воздействие, приложенное к системе, вызывает переходный процесс. Однако в рассмотрение обычно вводят те переходные процессы, которые вызваны типовыми воздействиями, создающими условия более полного выявления динамических свойств системы. К числу типовых воздействий относятся сигналы скачкообразного или ступенчатого вида, возникающие, например, при включении системы или при скачкообразном изменении нагрузки; сигналы ударного действия, представляющие собой импульсы малой длительности по сравнению с временем переходного процесса.
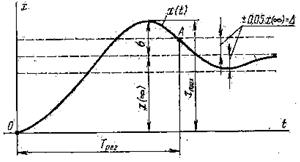 Рис.5.3.Примерный переходный процесс в САР
Рис.5.3.Примерный переходный процесс в САР
На рис.5.3 показан переходный процесс в некоторой САР (САУ), вызванный типовым воздействием. Переходный процесс этого графика соответствует устойчивой системе. Однако могут быть системы неустойчивые с собственными колебаниями, расходящимися во времени. В неустойчивой следящей системе регулируемая (выходная) величина не будет следовать за изменением управляющего сигнала, а в системе автоматической стабилизации регулируемый параметр будет с течением времени всё больше и больше отклоняться от установленного значения. Конечно, нельзя допускать, чтобы система автоматики была неустойчивой.
На рис.5.3 приняты следующие обозначения:  - переходный процесс;
- переходный процесс;  - установившиеся значение переходного процесса устойчивой системы, имеющей при
- установившиеся значение переходного процесса устойчивой системы, имеющей при  нулевую ошибку по положению;
нулевую ошибку по положению;  - максимальное отклонение регулируемой величины с момента
- максимальное отклонение регулируемой величины с момента  ;
;  - величина перерегулирования;
- величина перерегулирования;  - трубка переходного процесса, определяющая практическое завершение переходного процесса; Трег – время переходного процесса, время входа кривой в трубку.
- трубка переходного процесса, определяющая практическое завершение переходного процесса; Трег – время переходного процесса, время входа кривой в трубку.
Вследствие этого в числе основных требований, предъявляемых к САР, должно быть прежде всего выполнено условие устойчивости. Чтобы качественно выполнять задачу регулирования в различных изменяющихся условиях работы, система должна обладать определённым (заданным) запасом устойчивости.
В устойчивых системах автоматического регулирования переходный процесс с течением времени затухает и наступает установившееся состояние.
Исследование САР (САУ) связано с изучением процессов, протекающих как в самой системе, так и в элементах. Характер и направление протекания процессов соответствуют тем или иным физическим законам, математическая формулировка которых для рассматриваемой системы и определяет уравнение, которое может быть положено в основу анализа. Уравнения, описывающие процессы в системах, может быть линейными дифференциальными с постоянными и переменными коэффициентами, нелинейными дифференциальными и разностными уравнениями, алгебраическими и т.д.
Любая автоматическая система состоит из связанных между собой элементов. Поэтому дифференциальное уравнение системы можно получить, составл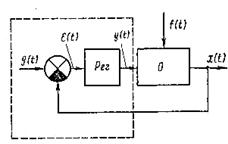 яя уравнения отдельных элементов.
яя уравнения отдельных элементов.
Рис.5.4.Принципиальная схема САР
Если в системе выделяются объект О и регулятор Рег (рис.5.4), то общее уравнение системы можно получить из системы уравнений объекта и регулятора. Пусть, например, состояние объекта характеризуется регулируемой величиной  , регулирующим воздействием
, регулирующим воздействием  и возмущением
и возмущением  . Тогда регулируемая величина может быть представлена функцией
. Тогда регулируемая величина может быть представлена функцией
 ,
,
где  -производные переменных , , .
-производные переменных , , .
Состояние регулятора характеризуется регулирующим воздействием  , которое является выходным сигналом, и входным воздействием
, которое является выходным сигналом, и входным воздействием  , равным разности
, равным разности  . Вследствие этого процессы в регуляторе будут описываться двумя уравнениями:
. Вследствие этого процессы в регуляторе будут описываться двумя уравнениями:

Последнее уравнение называется уравнением ошибки. Система этих трёх уравнений полностью описывает процессы в САР (САУ). Если в этих уравнениях исключить переменные  и
и  , то получим дифференциальное уравнение системы
, то получим дифференциальное уравнение системы

Это уравнение оценивает состояние системы во времени, определяет переходные процессы в системе и обычно называется уравнением динамики. Оно может быть как линейным, так и нелинейным. Последнее по возможности подвергается линеаризацией.
Если функция  аналитическая, то линеаризация осуществляется с помощью разложения в ряд Тейлора в окрестности точки, характеризующей равновесия. В этом разложении оставляют для рассмотрения только отклонения первой степени. Чем меньше отклонения от состояния равновесия, тем меньше ошибка в оценке процессов в нелинейном устройстве, возникающая в результате замены нелинейного уравнения линейным.
аналитическая, то линеаризация осуществляется с помощью разложения в ряд Тейлора в окрестности точки, характеризующей равновесия. В этом разложении оставляют для рассмотрения только отклонения первой степени. Чем меньше отклонения от состояния равновесия, тем меньше ошибка в оценке процессов в нелинейном устройстве, возникающая в результате замены нелинейного уравнения линейным.
Предположим, что последнее уравнение динамики для некоторой системы является нелинейным. В установившемся режиме при постоянных воздействиях поведение системы определяется уравнением статики, которое получается из этого уравнения и записывается в виде

Если вследствие изменения воздействия  произошло отклонение от состояния равновесия, то рассматриваемое уравнение принимает вид
произошло отклонение от состояния равновесия, то рассматриваемое уравнение принимает вид

Осуществляя разложение правой части этого уравнения в ряд Тейлора в окрестности точек  и оставляя в этом разложении только отклонения первой степени, получим
и оставляя в этом разложении только отклонения первой степени, получим

 .
.
После исключения уравнения статики
 ,
,
где 
Последнее уравнение является линейным с постоянными коэффициентами и называется уравнением первого приближения. Как было показано А.М. Ляпуновым, с помощью линеаризованных уравнений можно точно решить задачу об устойчивости равновесия большинства непрерывных систем.
При решении первых трёх уравнений в случае систем автоматической стабилизации, когда регулируемая величина должна поддерживаться на постоянном уровне, следует иметь в виду, что в уравнении регулятора отклонение регулируемой величины должно войти со знаком минус. Действительно, если уставка регулятора является постоянной величиной и вследствие этого  , а возмущающее воздействие изменилось и стало равным
, а возмущающее воздействие изменилось и стало равным
 и тем самым вывело систему из состояния равновесия, то уравнение ошибки может быть записано в виде
и тем самым вывело систему из состояния равновесия, то уравнение ошибки может быть записано в виде  , или после исключения уравнения статики
, или после исключения уравнения статики  получим
получим  .
.
Вводя полученный результат в уравнении регулятора, запишем
 .
.
Знак минус перед отклонением регулируемой величиной  и её производными указывает на справедливость сделанного ранее утверждения.
и её производными указывает на справедливость сделанного ранее утверждения.
САР, находящаяся под воздействием управляющего сигнала и возмущения, имеет дифференциальное уравнение предыдущего вида. Не уменьшая общности, но вместе с тем упрощая задачу, предположим, что управляющий сигнал равен нулю и движение системы обусловлено только возмущающим воздействием. Тогда уравнением динамики системы будет иметь вид  .
.
Решение линейного дифференциального уравнения, определяющее закон изменения регулируемой величины во времени при заданном воздействии и известных начальных условиях, состоит из решения  однородного дифференциального уравнения и частного решения
однородного дифференциального уравнения и частного решения  заданного неоднородного уравнения: =+.
заданного неоднородного уравнения: =+.
Решение однородного уравнения  определяет свободное движение системы, или свободное колебания.
определяет свободное движение системы, или свободное колебания.
Частное решение предыдущего уравнения представляет собой вынужденное движение, обусловленное действием возмущения и управляющего сигнала, если последний равен нулю.
Найдём составляющие свободного и вынужденного движений системы, применяя преобразование Лапласа. Допустим, что воздействие преобразуемо по Лапласу и имеет изображение  .
.
Тогда изображение регулируемой величины  с учётом ненулевых начальных условий может быть получено на общее уравнение динамики:
с учётом ненулевых начальных условий может быть получено на общее уравнение динамики:
 ,
,
где 
 .
.
Полином  учитывает эффект действия начальных условий. В этом многочлене
учитывает эффект действия начальных условий. В этом многочлене
 является соответственно значениями регулируемой величины, её первой производной и всех последующих до
является соответственно значениями регулируемой величины, её первой производной и всех последующих до  -й включительно в момент времени , непосредственно предшествующий моменту приложения воздействия.
-й включительно в момент времени , непосредственно предшествующий моменту приложения воздействия.
Если в рассмотрение ввести начальные условия, характеризующие состояние системы до моменты приложения воздействия, можно не вводить в полином значения самого воздействия и его производных для момента .
Пусть изображение воздействия  имеет полюсы
имеет полюсы  не совпадающие с нулями
не совпадающие с нулями  полинома
полинома  . Полагаем, что корни
. Полагаем, что корни  полинома простые и среди них нет нулевого, соответствующего точке
полинома простые и среди них нет нулевого, соответствующего точке  . В этом случае используя разложение правой части уравнения
. В этом случае используя разложение правой части уравнения  на простые дроби с последующим применением обратного преобразования Лапласа, получим
на простые дроби с последующим применением обратного преобразования Лапласа, получим
 ,
,
где  .
.
Первое слагаемое в правой части последнего уравнения определяет вынужденное движение системы (частное решение дифференциального уравнения), зависящее от вида внешнего воздействия.
Второе слагаемое в правой части этого уравнения характеризует свободное движение системы при нулевых начальных условиях и возникает в системе под действием возмущения, на что указывает присутствие во втором слагаемом под знаком суммы функции  , характеризующей воздействие. Это слагаемое получено объединением под знаком суммы всех простых дробей, определяемых полюсами
, характеризующей воздействие. Это слагаемое получено объединением под знаком суммы всех простых дробей, определяемых полюсами  передаточной функции системы и не зависящих от начальных условий.
передаточной функции системы и не зависящих от начальных условий.
Третье слагаемое в этом уравнении обусловливает вторую составляющую свободного движения, которая возникает в системе при нулевых начальных условиях и отсутствии возмущения. Третье слагаемое – это сумма простых дробей, характеризующихся полюсами передаточной функции системы и зависящих от начальных условий.
Таким образом, второе и третье слагаемое определяют свободное движение системы , которое зависит от корней характеристического уравнения, являющихся полюсами передаточной функции системы.
Свободное и вынужденное движение системы позволяет оценивать процесс регулирования в целом. Если свободное движение оценивает поведение системы в переходном режиме, то вынужденное движение характеризует установившийся режим.
При написании общего уравнения динамики принимали, что управляющее воздействие  . Предположим теперь, что на систему действует и управляющий сигнал, и возмущения. Тогда дифференциальное уравнение системы при использовании операторной формы записи будет иметь вид
. Предположим теперь, что на систему действует и управляющий сигнал, и возмущения. Тогда дифференциальное уравнение системы при использовании операторной формы записи будет иметь вид  , где
, где  ;
;  ;
;  ;
; 
Символические выражения  являются многочленами от символа дифференцирования
являются многочленами от символа дифференцирования  .
.
Решение последнего уравнения может быть получено в соответствии с общей методикой, если управляющее воздействие  и возмущение , входящее в определённый комбинации в правую часть его, рассматривать как некоторый единый сигнал, вызывающий появление процесса регулирования. В то же время решение этого уравнения может быть найдено в виде суммы решений, каждое из которых соответствует одному из прикладываемых к системе воздействий. При определении решения, соответствующего управляющему воздействию , можно положить =0. Для нахождения решения, отвечающего возмущению , приравнивается нулю управляющий сигнал.
и возмущение , входящее в определённый комбинации в правую часть его, рассматривать как некоторый единый сигнал, вызывающий появление процесса регулирования. В то же время решение этого уравнения может быть найдено в виде суммы решений, каждое из которых соответствует одному из прикладываемых к системе воздействий. При определении решения, соответствующего управляющему воздействию , можно положить =0. Для нахождения решения, отвечающего возмущению , приравнивается нулю управляющий сигнал.
В этом заключается принцип суперпозиции – важное свойство линейных уравнений и линейных систем. Для нелинейных уравнений это принцип не имеет места.
Пусть уравнение динамики системы имеет вид  .
.
Полагаем, что входное воздействие является гармонической функцией с частотой ω, начальной фазой, равной нулю, и амплитудой G, т.е.  . Подставив последнее уравнение в предыдущее и применив преобразование Лапласа, считая при этом, что в общем случае могут иметь место ненулевые начальные условия, найдём изображение:
. Подставив последнее уравнение в предыдущее и применив преобразование Лапласа, считая при этом, что в общем случае могут иметь место ненулевые начальные условия, найдём изображение:
 ,
,
где  - многочлены, полученные из полиномов
- многочлены, полученные из полиномов  путём замены оператора дифференцирования
путём замены оператора дифференцирования  комплексной переменной
комплексной переменной  ; - многочлен, учитывающий ненулевые начальные условия.
; - многочлен, учитывающий ненулевые начальные условия.
Предположим, что не имеет нулей в правой полуплоскости и мнимых корней, равных  . Тогда, осуществляя разложение правой части последнего уравнения на простые дроби и объединяя дроби, определяемые полюсами воздействия предыдущего, в соответствии с выражением для можно найти установившееся вынужденное движение в системе при гармоническом воздействии на входе:
. Тогда, осуществляя разложение правой части последнего уравнения на простые дроби и объединяя дроби, определяемые полюсами воздействия предыдущего, в соответствии с выражением для можно найти установившееся вынужденное движение в системе при гармоническом воздействии на входе:
 .
.
Так как  , то предыдущее соотношение преобразуется к виду
, то предыдущее соотношение преобразуется к виду  .
.
Это выражение, определяющее вынужденное движение при гармоническом входном сигнале, показывают, что в установившемся режиме на входе системы будут гармонические колебания с той же частотой ω, что и на входе, но с другой амплитудой, равной  ; они сдвинуты по фазе относительно входных колебаний на величину
; они сдвинуты по фазе относительно входных колебаний на величину  .
.
Из последней формулы видно, что амплитуда и фаза выходных колебаний зависят от частоты гармонического сигнала на входе и от физических параметров системы. Каким образом будут изменяться амплитуда и фаза колебаний на входе для данной системы при изменении частоты, легко определить по предыдущей формуле, получаемой из передаточной функции простой заменой комплексной переменной мнимой переменной  .
.
Формула определяет частотные характеристики системы.
В АФХ выделим вещественную и мнимую части, при этом получим соотношение
 ,
,
в котором 
 ,
,
причём 
Функция Р(ω) обычно называется вещественной частотной характеристикой (в литературе принято также обозначать Re(ω)), а функция Q(ω) – мнимой частотной характеристикой (в литературе также – Jm(ω)).
Вещественная частотная характеристика, как показывает формула Р(ω), является чётной функцией относительно частоты ω, т.е. Р(-ω)= Р(ω). Мнимая частотная характеристика определяемая выражением Q(ω), является нечётной функцией. Это означает, что Q(-ω)= -Q(ω) и Q(0)=0.
Вещественная и мнимая частотные характеристики связаны с АЧХ и ФЧХ соотношениями 
На рис.3.5, а показана АФХ некоторой системы (кривая 1). Построение характеристики основано на определении положения вектора  (в литературе и
(в литературе и  ), вещественная и мнимая части которого откладывается вдоль соответствующих осей координат. Из построения следует, что АФХ является геометрическим местом точек концов вектора АО при изменении частоты от 0 до
), вещественная и мнимая части которого откладывается вдоль соответствующих осей координат. Из построения следует, что АФХ является геометрическим местом точек концов вектора АО при изменении частоты от 0 до  . Другими словами, конец вектора ОА при изменении частоты в указанных пределах описывает на комплексной плоскости кривую, которая является АФХ. Длина вектора ОА для различных частот определяет АЧХ, а аргумент вектора – ФЧХ.
. Другими словами, конец вектора ОА при изменении частоты в указанных пределах описывает на комплексной плоскости кривую, которая является АФХ. Длина вектора ОА для различных частот определяет АЧХ, а аргумент вектора – ФЧХ.
АФХ может быть построена на основании экспериментальных данных. Если система устойчива и её свободное движение с течением времени затухает, то возможна постановка эксперимента по определению амплитуды и фазы колебаний в установившемся режиме на выходе системы. Для этого на вход системы подают гармонический сигнал с постоянной амплитудой, фиксированной фазой и частотой, которую при проведении опыта можно изменять. Амплитуда колебаний на выходе и фазовый сдвиг по отношению к входным колебаниям обычно измеряются с помощью комплекта инфра низкочастотной аппаратуры, состоящего из генератора колебаний, прибора для измерения частоты и фазы, прибора для измерения амплитуды.
При анализе САР на устойчивость и качество процесса регулирования, а также при решении других задач часто принято обращаться к логарифмическим частотным характеристикам, которые в значительной степени сокращают объём вычислительной работы. При построении этих характеристик используются логарифмические координаты.
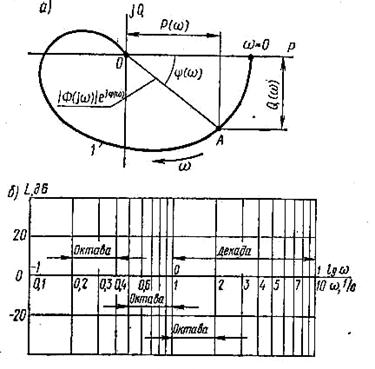 Рис.5.5. АФХ (а) и оси ЛАЧХ (б)
Рис.5.5. АФХ (а) и оси ЛАЧХ (б)
В случае построения логарифмических АЧХ по оси ординат (рис.5.5, б) откладывает усилие измеряемое в децибелах (дБ) и вычисляемое по формуле
 .
.
Децибел является единицей логарифмической относительной величины. Изменение отношения двух величин в 10 раз соответствует изменению усиления на 20 дБ.
По оси абсцисс (рис.5.5, б) на графике логарифмических характеристик откладывается десятичных логарифм частоты, т.е.  , но обычно около отложенных частиц пишется значение самой частоты
, но обычно около отложенных частиц пишется значение самой частоты  . В этом случае масштаб получается логарифмическим. За единицы длины по оси абсцисс принимают октаву или декаду. Октава соответствует удвоенному значению частоты. Длина отрезка на оси абсцисс, равное октаве, не зависит от частоты и определяется выражением
. В этом случае масштаб получается логарифмическим. За единицы длины по оси абсцисс принимают октаву или декаду. Октава соответствует удвоенному значению частоты. Длина отрезка на оси абсцисс, равное октаве, не зависит от частоты и определяется выражением  Декада соответствует удесятерённому значению частоты, а длина отрезка на оси абсцисс, равноного декаде, также не зависит от частоты и определяется выражением
Декада соответствует удесятерённому значению частоты, а длина отрезка на оси абсцисс, равноного декаде, также не зависит от частоты и определяется выражением  .
.
При построении логарифмической фазочастотной характеристики по оси ординат откладывается фаза (град) в равномерном масштабе, а по оси абсцисс - .
Предположим, что начальные условия являются нулевыми, т.е. до момента приложения управляющего сигнала и возмущающего воздействия система находилась в состоянии покоя.
Пусть система линейных уравнений, записанных в операторной форме, для объекта, регулятора и элемента сравнения имеет вид  ;
;
 .
.
Первое из этих уравнений описывает процессы в объекте, второе – в регуляторе, а третье представляет собой уравнение ошибки. Многочлены  ,
,  являются операторными и определяются структурой исходных дифференциальных уравнений.
являются операторными и определяются структурой исходных дифференциальных уравнений.
Преобразовывая эти уравнения по Лапласу, для нулевых начальных условий получим

 .
.
Решая совместно эти уравнения и исключая промежуточные переменные  , найдём изображение регулируемой величины:
, найдём изображение регулируемой величины:
 ,
,
где
 .
.
Если в качестве выходной величины рассматривать ошибку  или её изображение
или её изображение  , то при решении предыдущей системы уравнений нужно исключить переменные
, то при решении предыдущей системы уравнений нужно исключить переменные 
 . В этом случае изображение выходной величины системы, т.е. изображение ошибки
. В этом случае изображение выходной величины системы, т.е. изображение ошибки 
Приведённые уравнения позволяют установить понятия передаточных функций замкнутой и разомкнутой систем по управляющему воздействию, передаточной функции ошибки, передаточных функций замкнутой и разомкнутой систем по возмущающему воздействию, а также передаточной функции замкнутой системы для ошибки по возмущению.
Передаточные функции замкнутой и разомкнутой систем по управляющему воздействию могут определены на основании уравнении  и
и  . Пусть возмущающее воздействие
. Пусть возмущающее воздействие  . Тогда
. Тогда  и из уравнения
и из уравнения  находим
находим
 .
.
 Это выражение представляет собой отношение изображения выходного сигнала замкнутой системы к изображению входного сигнала при нулевых начальных условиях. Следовательно, эта формула является передаточной функцией замкнутой системы автоматического регулирования по отношению к управляющему воздействию.
Это выражение представляет собой отношение изображения выходного сигнала замкнутой системы к изображению входного сигнала при нулевых начальных условиях. Следовательно, эта формула является передаточной функцией замкнутой системы автоматического регулирования по отношению к управляющему воздействию.
Структурная схема системы, соответствующая последней передаточной функции, показана на рис.5.6, а.
Разомкнём главную обратную связь системы, тогда уравнение ошибки примет вид  или
или  . Это означает, что решение приведённой выше системы уравнений при и исключении переменной даёт передаточную функцию разомкнутой системы, определяемую формулой:
. Это означает, что решение приведённой выше системы уравнений при и исключении переменной даёт передаточную функцию разомкнутой системы, определяемую формулой:  . Это выражение определяет передаточную функцию разомкнутой системы по управляющему воздействию.
. Это выражение определяет передаточную функцию разомкнутой системы по управляющему воздействию.
Передаточная функция ошибки. Рассматриваемая функция находится из уравнения  , если обе части его разделить на изображение управляющего сигнала
, если обе части его разделить на изображение управляющего сигнала  и положить . В этом случае
и положить . В этом случае  , или
, или  .
.
Эти выражения определяют передаточную функцию ошибки, которая характеризует собственную ошибку воспроизведения управляющего воздействия на выходе САР. На рис.3.6, б приведена структурная схема системы, соответствующая этой передаточной функции.
Передаточные функции по возмущающему воздействию. Передаточные функции замкнутой и разомкнутой систем по возмущающему воздействию находятся по уравнениям и , если положить =0, и следовательно =0. Тогда исходя из определения передаточной 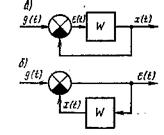 функции на основании уравнения для можно получить
функции на основании уравнения для можно получить  . Эта формула определяет передаточную функцию замкнутой системы по возмущающему воздействию.
. Эта формула определяет передаточную функцию замкнутой системы по возмущающему воздействию.
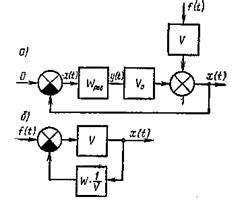
На рис.5.7, а представлена структурная схема системы, составленная в соответствии с указанной выше системой уравнений. Поскольку управляющий сигнал равен нулю, на входе регулятора с передаточной функцией  будет действовать сигнал . Выходной сигнал объекта
будет действовать сигнал . Выходной сигнал объекта  равный
равный  , суммируется в сумматоре 1 с выходным сигналом
, суммируется в сумматоре 1 с выходным сигналом  по каналу прохождения возмущения, равным
по каналу прохождения возмущения, равным  . Результат суммирования, как это следует из уравнения объекта в системе уравнений, равен . Это означает, что на выходе сумматора 1 получается регулируемая величина . На основании передаточной функции замкнутой системы структурная схема может быть преобразована к виду, приведённому на рис.5.7, б.
. Результат суммирования, как это следует из уравнения объекта в системе уравнений, равен . Это означает, что на выходе сумматора 1 получается регулируемая величина . На основании передаточной функции замкнутой системы структурная схема может быть преобразована к виду, приведённому на рис.5.7, б.
При размыкании главной обратной связи в рассматриваемых схемах (рис.5.7, а и б) на объект будет действовать только возмущение , так как выходной сигнал регулятора  вследствие равенства нулю управляющего воздействия и сигнала главной обратной связи. При этом
вследствие равенства нулю управляющего воздействия и сигнала главной обратной связи. При этом  из уравнения для объекта находится передаточная функция
из уравнения для объекта находится передаточная функция
 , которая была введена в рассмотрение соотношение при написании уравнения .
, которая была введена в рассмотрение соотношение при написании уравнения .
Выражение определяет передаточную функцию разомкнутой системы по возмущающему воздействию.
Передаточная функция замкнутой системы для ошибки по возмущению. Эта передаточная функция устанавливается по уравнению при условии  :
:

Передаточная функция замкнутой системы для ошибки по возмущению характеризует ошибку воспроизведения, вызванную возмущающим воздействием.
Вид передаточных функций позволяет судить о том, является 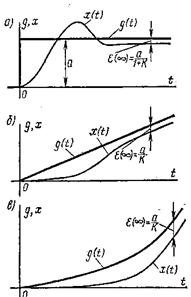 САР статической или астатической (с астатизмом первого и второго порядка) по управляющему воздействию или возмущению. Во всех этих случаях соответствующие передаточные функции должны обладать определёнными свойствами.
САР статической или астатической (с астатизмом первого и второго порядка) по управляющему воздействию или возмущению. Во всех этих случаях соответствующие передаточные функции должны обладать определёнными свойствами.
Статическая ошибка в статических следящих системах определяется из рис.5.8, а, где показана реакция системы на скачкообразный входной сигнал  . Статическая ошибка при
. Статическая ошибка при 
 , где
, где  -передаточный коэффициент.
-передаточный коэффициент.
Если на вход системы с астатизмом первого порядка (позиционной системы) подать сигнал, изменяющийся с постоянной скоростью (рис.5.8, б),  , то по теореме о конечном значении оригинала легко найти ошибку в установившемся состоянии:
, то по теореме о конечном значении оригинала легко найти ошибку в установившемся состоянии:  . То же самое получим при подаче на вход скоростной системы (астатическая система) управляющий сигнал, изменяющийся с постоянным ускорением
. То же самое получим при подаче на вход скоростной системы (астатическая система) управляющий сигнал, изменяющийся с постоянным ускорением  (рис.5.8, в).
(рис.5.8, в).
Назначение, цели и функции АСУ ТП. Автоматизированные системы управления технологическими процессами (АСУ ТП) (ГОСТ 20.003-84) предназначены для выработки и реализации управляющих воздействий на технологический объект управления (ТОУ) и представляют собой человеко – машинные системы, обеспечивающие автоматизированный сбор и обработку информации, необходимой для оптимизации управления технологическим объектом в соответствии с принятым критерием.
Комплекс технических средств (КТС) АСУ ТП выполняет следующие функции:
à сбор и преобразование информации (без изменения её содержания) о состоянии процесса;
à передачу информации по каналам связи (перемещение в пространстве);
à преобразование, хранение и обработка информации, формирование команд управления (перемещение информации во времени с изменением её содержания);
à использование и представление командной информации для воздействия на процесс и связи с оператором.
Совместно функционирующие ТОУ и управляющая им АСУ ТП образуют автоматизированный технологический комплекс (АТК).
АСУ ТП является частным видом систем управления, которые представляют особый класс систем, характеризующийся наличием самостоятельных функций, целей управления и организацией специальных систем их реализации. Степень достижения поставленных целей принято характеризовать с помощью критерия управления. Критерием может быть технико - экономический показатель, например, себестоимость выходного продукта, технологические показатели – параметры процесса, характеристики выходного продукта и т.п.
Отметим, что определение АСУ ТП как системы отличается от классического определения системы автоматического управления (САУ) как совокупность объекта управления и регулирующих устройств. В этом смысле понятие АТК подпадает под классическое определение системы управления, если в роли объекта выступает ТОУ, а в роли регулятора – АСУ ТП. Обобщённая схема АСУ ТП изображена на рис.5.9.
Рис.5.9. Обощённая блок – схема АСУ ТП
Сформулированное определение подчёркивает, во – первых, наличие в составе АСУ ТП современных автоматических средств сбора и переработки информации, в первую очередь средств вычислительной техники; во – вторых, роль человека в системе как субъекта труда, принимающего содержательное участие в выработке решений по управлению; в третьих, что АСУ ТП – это система, осуществляющая переработку технологической и технико - экономической информации.
Ещё один важный признак АСУ ТП – осуществление управление в темпе протекания технологических процессов, т.е. в реальном масштабе времени. АСУ ТП как компонент общей системы управления промышленным предприятием (АСУ П) предназначена для целенаправленного ведения технологических процессов и обеспечения смежных и вышестоящих систем управления оперативной и достоверной технико – экономической информацией. Создаваемые для объекта основного и вспомогательного производства АСУ ТП представляет низовой уровень автоматизированных систем управления производством.
При наличии на предприятии автоматизированных систем технической и технологической подготовки производства (АСТ ПП) должно быть обеспечено взаимодействие АСУ ТП с этими системами. АСУ ТП получает от них необходимую технологическую информацию для обеспечения заданного процесса и направляет в АСТ ПП фактическую оперативную информацию, необходимую для их функционирования, в том числе корректировки технологических процессов.
Перечень, форма представления и режим обмена информации между АСУ ТП и другими взаимосвязанными с ней системами управления определяется в каждом конкретном случае в зависимости от специфики производства, его организации и структуры управления им.
Реализация целей в конкретных АСУ ТП достигается выполнением в них определённой последовательности операций и вычислительных процедур, в значительной степени типовых по своему составу и поэтому объединяемых в комплекс типовых функций АСУ ТП. Функции АСУ ТП подразделяются на управляющие, информационные и вспомогательные.
Управляющие функции АСУ ТП – это функции, результатами которых являются выработка и реализация управляющих воздействий на ТОУ. К ним относятся: регулирование (стабилизация) отдельных технологических переменных; однотактное логическое управление операциями или аппаратами; программное логическое управление группой оборудования; оптимальное управление установившимися или переходными режимами или отдельными стадиями процесса; адаптивное управление объектом в целом.
Информационные функции АСУ ТП – это функции системы, содержанием которых является сбор, обработка и представление информации о состоянии АТК оперативному персоналу или передача этой информации для последующей обработки. К информационным функциям АСУ ТП относятся: централизованное измерение технологических параметров; косвенное измерение; вычисление параметров процесса (технико – экономических, внутренних переменных); формирование и выдача данных оперативному персоналу АСУ ТП или АТК; подготовка и передача информации в смежные системы управления; обобщённая оценка информации в смежные системы управления; обобщённая оценка и проверка состояния АТК и его оборудования.
Относительная особенность управляющих и информационных функций АСУ ТП – их направленность, на конкретную потребность (объект управления, оперативный персонал, смежные системы управления).
Вспомогательные функции АСУ ТП состоят в обеспечении контроля за состоянием функционирования технических и программных средств системы.
На рис.5.10 представлена цеховая типовая структура АСУ ТП.
 В сфере промышленного производства практический интерес представляют системы управления трёх классов: локальные системы контроля, регулирования и управления (ЛСКРиУ), централизованные системы контроля, регулирования и управления (СЦКРиУ) и АСУ ТП.
В сфере промышленного производства практический интерес представляют системы управления трёх классов: локальные системы контроля, регулирования и управления (ЛСКРиУ), централизованные системы контроля, регулирования и управления (СЦКРиУ) и АСУ ТП.
Рис.5.10. Типовая структура АСУ ТП: ---------- - автоматическая связь; - - - - - - неавтоматическая связь; 1 – указание и распоряжения; 2 – управляющие воздействия; 3 - информация о состоянии объекта; 4 – ввод информации
Локальные системы контроля, регулирования и управления (рис.5.11) эффективны при автоматизации технологически независимых объектов с компактным расположением оборудования (основного) и несложными целями управления (стабилизация, программное управление) при хорошо отработанной технологии и стационарных условиях эксплуатации. Локальные регуляторы (ЛР) могут быть аналоговыми, дискретными (в том числе цифровыми), одно- и многоканальными. Наличие человека – оператора (лица, принимающего решение – ЛПР) в системе позволяет использовать эту структуру на объектах с невысоким уровнем механизации и надёжности технологического оборудования, осуществлять общий контроль за ходом технологического процесса и ручное управление.
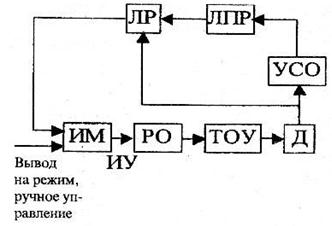 Рис.5.11. Типовая структура локальной системы контроля, регулирования и управления
Рис.5.11. Типовая структура локальной системы контроля, регулирования и управления
Структура ЛСКРиУ соответствует классической структуре систем управления: датчики переменных на выходе ТОУ, автоматические регуляторы, исполнительные устройства (ИУ), передающие команды управления (в том числе и от ЛПР в режиме ручного управления) на регулирующие органы (ОР) ТОУ. Устройство связи с оператором состоит, как правило, из измерительных, сигнал изирующих и регистрирующих приборов.
изирующих и регистрирующих приборов.
Структура многоканальной СЦКРиУ изображена на рис.5.12.
В многоканальных системах контроля и управления некоторые функциональные устройства являются общими для всех каналов системы и с помощью коммутаторов и распределителей каналов (КК и РК) подключаются к индивидуальным устройствам канала, образуя замкнутый контур управления. В системах управления технологическими процессами, как правило, используют многоканальные вторичные преобразователи (МВП), автоматические контрольно – измерительные и регистрирующие приборы (МКИП), многоканальные регулирующие приборы (МРУ), многоканальные устройства логико – командного управления (МЛКУ). Функции опретаро – технолога (ЛПР) остаются прежними: оценка функционирования СЦКРиУ и формирование оптимального управления путём изменения уставок в ЗУ.
Контрольные вопросы.
1.К чему сводится управление единичным процессом?
2.Какими режимами работы характеризуются технические процессы? Охарактеризуйте их.
3.Какие дополнительные элементы применяют в системах управления для повышения устойчивости их работы?








