 2014-02-05
2014-02-05 729
729Раздел 5. Лекция 2. Классификация структур и типы автоматизированных и автоматических систем управления
Охарактеризуйте типовую централизованную структуры системы контроля, регулирования и управления.
Охарактеризуйте типовую структуру АСУ ТП.
Охарактеризуйте принципиальную схему САР.
6.В чём суть математической модели САУ?
7.Как получают передаточные функции САУ (САР)?
8.Каким образом определяется устойчивость и запас устойчивости САУ?
9.Какие структурные схемы используются в САУ?
10.Назначение, цели и функции АСУ ТП?
11.Охарактеризуйте обобщённую схему АСУ ТП.
12.Какие виды АСУ Вы знаете? Охарактеризуйте их.
14.Охарактеризуйте типовую локальную структуру системы контроля,регулирования и управления?
Литература по лекции 1.
1.Ульянов В,А., Леушин И.О., Гущин В,Н. Технологические измерения, автоматика и управление в технических системах. Ч.2. Н.Новгород: НГТУ, 2002. –С.10-77.
2.Клюев А.С. Автоматическое регулирование. М.: Высшая школа, 1986. 368 с.
3.Радионов В.Д.,, Терехов В.А., Яковлев В.Б. Технические средства АСУ ТП. М.: Высшая школа, 1989. 263 с.
4.Промышленные приборы и средства автоматизации. Справочник/Под ред В.В. Черенкова. – Л.: Машиностроение, 1987. – 846 с.
5.Майзель М.М. Автоматика и системы управления производственными процессами. М.: Высшая школа,1972. С.85-264.
6.Глинков Г.М., Косырев А.И., Шевцов Е.К. Контроль и автоматизация металлургических процессов. М.: Металлургия, 1989. С.94-143.
7.Воронов А.А., Титов В.К., Новогранов Б.Н. Основы теории автоматического регулирования и управления. М.: Высшая школа, 1977. С.154-356.
8.Коганов В.Ю., Блинов О.М., Беленький А.М. Автоматизация управления металлургическими процессами. М.: Металлургия,!974. С.17-80.
7.Дорф Р., Бишоп Р. Современные системы управления. М.: Лаборатория Базовых Знаний, 2002. С.243-564.
8.Филипс Ч., Харбор Р. Системы управления с обратной связью. М.: Лаборатория Базовых знаний, 2001. С.113-326.
9.Методы классической и современной теории автоматического управления. Т.1 /Под ред. К.А. Пупкова. М.: МГТУ, 2004. С.150-179.
Автоматические системы, т.е. процессы, машины, агрегаты, цехи и заводы, выполняющие заданные им функции (достигающие предписанной им цели, выполняющие заданные им алгоритмы функционирования) без непосредственного вмешательства человека, могут быть отнесены к двум основным классам.
Автоматические системы первого класса выполняют свои функции по заранее заданной программе (т.е. закону и порядку) без свободы выбора (выходящие за пределы программы) и вне зависимости от условий фактического протекания процесса; поэтому в подобных системах контрольная, рабочая информация или вообще отсутствует, или имеет вспомогательное значение. Подобные автоматические системы называются циклическими, или детерминированными (безрефлексными или с жёстким управлением). Важнейшими их представителями являются машины – автоматы, автоматические линии и т.п. Очевидно, что при весьма ограниченном объёме используемой контрольной информации проектирование рассматриваемых систем должно основываться на очень большом количестве априорной информации из-за отсутствия свободы выбора при функционировании. Таким образом, работа детерминированной системы фактически распределена заранее и должна быть полностью обусловлена самой конструкцией и предварительной настройкой, поскольку при функционировании подобная система не может установить наличия отступлений от заданных параметров, учесть эти отклонения при дальнейшем функционировании, произвести корректировку настройки и т.п.
Автоматические системы второго класса функционируют в зависимости от фактического протекания некоторых заранее заданных процессов, т.е. на основе получаемой контрольной информации. Подобные автоматические системы называются ациклическими, или информационными, или рефлексными. Естественно, что при разработке информационных систем объём требуемой априорной информации обычно меньше, чем при разработке детерминированных систем.
В информационной автоматической системе, состоящей из ТОУ и управляющей им системы, происходит постоянный обмен информацией (контрольной и управляющей) между управляемым объектом и управляющей системой (регулируемые параметры и сигналы управления). Кроме того, как на объект, так на управляющую систему могут действовать внешние возмущающие воздействия, характеризующие влияние внешней среды на функционирование автоматической системы. Имеются ещё и входные переменные (для объекта и управляющей системы), изменение которых задаётся условиями, не зависящими от процессов, происходящих внутри автоматической системы. На некоторые параметры ТОУ могут накладываться условия, ограничивающие их изменение. В итоге в общем случае получается некоторая совокупность переменных величин, характеризующих состояние управляемого объекта.
Управляющая система, исходя из поставленной перед ней цели, а также в результате получения и переработки информации (о регулируемых входных и выходных переменных и возмущающих воздействиях) вырабатывает сигналы управления путём реализации алгоритма управления (в виде некоторой последовательности определённых математических и логических операций), позволяющего обеспечить выполнение цели управления при соблюдении накладываемых ограничений в любой момент и при любом сочетании условий работы.
Автоматические системы могут классифицироваться по различным признакам. Важнейшими из них являются следующие три:
o характер алгоритма функционирования;
o характер алгоритма управления;
o способность к самоприспосабливанию.
По характеру алгоритма функционирования различают три основных вида автоматических систем: стабилизирующие, программные и следящие, реализующие, соответственно, рассмотренные ранее требования производственных процессов.
По характеру алгоритма управления автоматические системы делятся на два вида: системы с разомкнутой цепью воздействий и системы с замкнутой цепью воздействий.
При разомкнутой цепи воздействий управляющая система реагирует на входные и возмущающие (относительно системы) воздействия без получения контрольной информации о значениях регулируемых параметров, а следовательно, без составления результатов своей работы с заданием и без возможности её корректировки.
При замкнутой цепи воздействий управляющая система получает также ещё и контрольную информацию о значениях регулируемого параметра, составляет эти значения с предписанными (требуемыми) и корректирует на этой основе свою работу. Замыкание цепи воздействий осуществляется обратной связью от управляемой системы к управляющей. Путь сигналов управления от управляемой системы к управляемой считается основной цепью воздействий – прямой связью.
Автоматические системы с замкнутой цепью воздействий в свою очередь делятся также на два типа: автоматическая система регулирования и автоматическая система поиска.
В автоматических системах регулирования управляющее воздействие вырабатывается в результате сравнения действительного значения управляемой величины с предписанным (заданным) значением (в каждый момент времени). Разность заданного и действительного значений параметра называется рассогласованием.
В автоматических системах поиска результирующие управляющие воздействия вырабатываются с помощью пробных управляющих воздействий и анализ результатов их.
При разработке системы управления с использованием метода поиска не требует полного математического описания ТОУ и условий его работы, что требует меньшего объёма априорной информации.
По способности к самоприспосабливанию автоматические системы делятся на системы без самоприспосабливания (их часто называют обыкновенными) и самоприспосабливающиеся (адаптивные).
САР (САУ) без самоприспосабливания – самые распространённые и простые информационные системы; они строятся на основе априорной информации таким образом, что при функционировании дают требующийся результат и надлежащие качественные характеристики для типовых, наиболее вероятных, принятых при разработке условий работы, и их изменениях в определённом диапазоне. В процессе эксплуатации основные динамические характеристики, включая структуру системы управления, автоматически не изменяются. Предусматривается лишь возможность ручных операций, перенастройки элементов системы в определённых пределах, переключения цепей, коммутирования и т.п.
Самоприспосабливающиеся системы – более сложные и новые, обладают способностью автоматически изменять свои характеристики (включая и структуру) и настройку для улучшения работы и учёта изменяющиеся обстановки функционирования. Эти так называемые контролируемые изменения осуществляются на базе получаемой рабочей информации в процессе функционирования. Отсюда следует, что системы без самоприспосабливания требует больше априорной и меньше рабочей информации по сравнению с самоприспосабливающимися системами.
Важнейшими видами самоприспосабливающихся систем являются самонастраивающиеся и самоорганизующиеся системы. У первых автоматически осуществляются изменения настройки и характеристик управляющей части, а у вторых – изменение её структуры.
Преимущество самоприспосабливающихся систем сводится к тому, что они автоматически приспосабливаются к изменяющимся условиям работы и автоматически находят успешный (в заранее заданном смысле) алгоритм управления, при любых условиях эксплуатации обеспечивающий заданный алгоритм функционирования. При этом должны автоматически, быстро и точно осуществляться вычислительные и логические операции, очень часто громоздкие и сложные, требующие решения систем дифференциальных уравнений в частных производных, что требует применения разнообразных вычислительных устройств.
Неприспосабливающиеся АСУ не изменяют своих свойств в процессе управления. Для этих систем, на основе всей априорной информации, выбирают структуру и настройки, которые обеспечивают оптимальные свойства системы для типовых или наиболее вероятных условий её работы.
Большинство АСУ, действующих на старых металлургических производствах относятся к неприспосабливающимся системам. Их свойства определяются при проектировании и наладке и в дальнейшем автоматически не изменяются, хотя условия работы ТОУ могут меняться.
Рассмотрим в качестве примера три возможных схемы стабилизации температурного режима при нагревании изделия, помещённого в камеру с паровым обогревом.
По первой схеме (безрефлексной) расчётным путём или эмпирически на основе априорной информации определяется положение (степень открытия) клапана паровыпускного вентиля, обеспечивающее необходимую температуру материала в камере. Задачей управления является только фиксация клапана в заранее определённом (заданном) положении. Автоматика в этом случае не учитывает колебания давления греющего пара, изменения температуры окружающей среды.
По второй (рефлексной, с разомкнутой цепью) расчётным путём на основе априорной информации определяются требующиеся положения (позиции) паровпускного клапана при различных давлениях пара. Автоматическое устройство в зависимости от давления пара (т.е. используя рабочую информацию) обеспечивает фиксацию паровыпускного клапана в соответствующей позиции. Эта система имеет разомкнутую цепь воздействий; управляющее воздействие (позиции паровыпускного клапана) зависит лишь от давления греющего пара и не связано непосредственно с самим процессом нагревания. Подобный метод управления режимом называется автоматическим регулированием по возмущению. Основным недостатком этой схемы является не устранённое влияние возможных колебаний температуры перегрева пара, температуры окружающего воздуха и т.п.
При третьей схеме (рефлексной, с замкнутой цепью) положение паровпускного клапана связывается непосредственно с действительной температурой изделия в камере (т.е. регулируемым параметром) таким образом, что бы при уменьшении температуры ниже требуемой клапан открывается, а при увеличении температуры выше требуемого проход для греющего пара уменьшался. Подобная автоматическая система имеет замкнутую цепь воздействий через обратную связь. Положение клапана оказывает управляющее воздействие на температуру изделия, а эта температура в свою очередь воздействует на положение клапана. По этой схеме компенсируется влияние всех возможных возмущающих воздействий6 колебаний давления и температуры пара, изменение температуры поступающего изделия и окружающего воздуха и т.д. Подобный метод управления режимом является автоматическим регулированием – управлением по отклонению.
В ряде случаев применяется комбинированное регулирование: цепь работает по возмущению, срабатывает быстро, но недостаточно точно (заданный алгоритм функционирования осуществляется с отклонениями, входящими за поле допуска), а другая регулирует по отклонению, выправляет ошибки, не устраняемые цепью регулирования по возмущению.
Как видно из приведённых примеров, по характеру использования информации АСУ можно разделить на разомкнутые замкнутые. Первых два примера – это разомкнутые системы, т.е. системы не использующие рабочую информацию о выходных величинах.
Разомкнутые системы можно подразделять на две группы: системы, работающие по жёсткой программе (первый пример), и системы, компенсирующие изменения входных или возмущающих величин; последние называют АСУ, действующими по возмущениям (второй пример и структурная схема на рис.5.13).
Структурная схема АСУ действующей по принципу компенсации возмущений предусматривает возможность измерения основных возмущающих факторов и устранения или уменьшения их влияния на конечные результаты процесса. ТОУ 1 может подвергаться воздействию возмущений Z, контролируемых устройством 2. При возникновении возмущения устройства 2 воздействует на регулирующий орган 3, изменяя поступление на ТОУ энергии или вещества хвх и компенсируя влияние возмущающего воздействия.
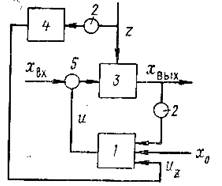 Принципиальные схемы регулирования по отклонению приведены на рис.5.1 -5.2. На рис.5.14 представлена одна из возможных структурных схем комбинированного регулирования по отклонению параметра от задания и с компенсацией контролируемых возмущений. ТОУ 3 оснащается датчиками 2, контролирующими действительные значения выходной величины хвых и возмущения Z. На вход регулятора 1 поступают три величины: заданное хо, действительное значение регулируемой величины хвых и сигнал uz, вырабатываемый устройством коррекции 4 и пропорциональный величине возмущения Z. В регуляторе 1 входные сигналы хо, хвых, uz алгебраически суммируются, в результате чего его воздействие на регулирующий орган 5 учитывает как отклонение выходной величины от зада
Принципиальные схемы регулирования по отклонению приведены на рис.5.1 -5.2. На рис.5.14 представлена одна из возможных структурных схем комбинированного регулирования по отклонению параметра от задания и с компенсацией контролируемых возмущений. ТОУ 3 оснащается датчиками 2, контролирующими действительные значения выходной величины хвых и возмущения Z. На вход регулятора 1 поступают три величины: заданное хо, действительное значение регулируемой величины хвых и сигнал uz, вырабатываемый устройством коррекции 4 и пропорциональный величине возмущения Z. В регуляторе 1 входные сигналы хо, хвых, uz алгебраически суммируются, в результате чего его воздействие на регулирующий орган 5 учитывает как отклонение выходной величины от зада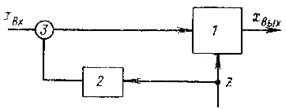 ния (х = хо - хвых), так и возникающее возмущение Z. Учёт возмущающих воздействий позволяет предварять отклонение выходной величины от задания и, следовательно, улучшает качество регулирования.
ния (х = хо - хвых), так и возникающее возмущение Z. Учёт возмущающих воздействий позволяет предварять отклонение выходной величины от задания и, следовательно, улучшает качество регулирования.
Рис.5.13.Структурная схема АСУ с компенсацией возмущений
Рис.5.14.Структурная схема комбинированной АСУ
По результатам регулирования АСУ можно разделить на две группы: астатические и статические системы. В астатических системах после окончания переходного процесса регулируемая величина равна заданной (практически она может отличаться от заданной на некоторую малую величину, обусловленную нечувствительностью системы к изменению регулируемой величины). В статических системах после окончания переходного процесса неизбежно возникает разность между установившимся и заданным значением регулируемой величины (статическая ошибка). Статическая ошибка зависит от величины возмущения и параметров настройки регулятора, однако принципиально неизбежна в статических системах.
Другим классификационным признаком САР (САУ) является метод использования энергии, необходимой для перемещения регулирующих органов. По этому признаку САР можно также разделить на две группы:
o системы прямого (непосредственного) действия;
o системы непрямого (косвенного) действия.
В первых энергия, необходимая для перемещения регулирующего органа, получается от сигнала, поступающего непосредственно от объекта на вход регулятора; во вторых используется посторонний источник энергии.
В зависимости от вида энергии, поступающей от постороннего источника, различают: электрические, пневматические, гидравлические и смешанные САР.
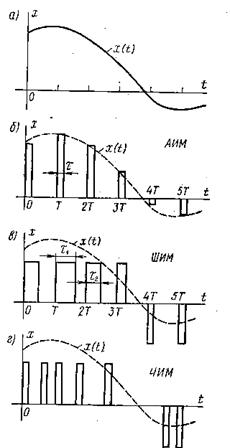
По характеру управляющих воздействий все системы автоматического управления можно разделить на две основные группы: непрерывные, или аналоговые, и дискретные системы. В непрерывных АСУ информация о работе системы и управляющие воздействия являются непрерывными функциями времени. В дискретных АСУ информация и управление относятся к определённым (дискретным) моментом времени. К дискретным системам относятся АСУ, в которых используются электронные цифровые вычислительные машины ЭВМ), цифровые измерительные приборы и цифровые регуляторы, кроме того, к дискретным системам относятся также импульсные системы управления. При импульсном управлении воздействия представляют собой периодические импульсы.
Квантование по уровню осуществляется в релейных системах, где дискретное воздействие отдельных элементов на последующие элементы в некоторые, заранее не предопределённые промежутки времени (зависящие от протекания процесса) может оставаться постоянным и вообще отсутствовать.
Квантование по времени имеет место в импульсных системах, в которых создаются импульсы (с паузами) воздействий в результате замыкания и размыкания цепи воздействий в определённые постоянные, заранее (с постоянной частотой) и не зависящие от действительного протекания процесса промежутки времени (т.е. принудительно).
Квантование как по уровню, так и по времени осуществляется в релейно – импульсных и кодо – импульсных системах. Их важнейшим видом являются цифровые системы.
Автоматические системы воспроизводятся математическими моделями, которые выбираются с некоторой идеализацией действительности и пренебрежением второстепенными факторами в той мере, в которой это допускается требуемой точностью инженерных методов расчёта. Математические модели, отображающие реальные системы, могут быть линейными и нелинейными: первые описываются линейными дифференциальными (иногда разностными), а вторые – нелинейными.
В зависимости от постоянства во времени их динамических свойств автоматические системы (как линейные, так и нелинейные) могут быть стационарными и нестационарными (переменными). Под динамическими свойствами здесь подразумевается количественная характеристика во времени реакции системы на приложенные к ней воздействия. Параметры модели могут быть сосредоточенными (постоянными по всем геометрическим координатам) и распредёлёнными (переменными хотя бы по одной геометрической координате). Естественно, что в первом случае используются обыкновенные дифференциальные уравнения (аргумент – время), во втором – дифференциальные уравнения в частных производных (аргументы – время и по крайней мере одна геометрическая координата).
Важной разновидностью автоматических систем является телемеханическая система; в ней процессы, разделённые в пространстве, автоматизационно связываются специальными средствами связи.
Кроме основных алгоритмов функционирования в системах автоматического управления: стабилизации, программного и следящего управления в классификации САУ (АСУ или САР) активно внедряются в производства ряд более тонкие алгоритмы функционирования: экстремальное и оптимальное управление. Эти алгоритмы описаны выше и здесь приведены лишь часть уточняющих данных.
Первые упоминания в литературе об экстремальных регуляторах содержатся в статье М. Леблана (1922), где описан регулятор для колебательного контура элек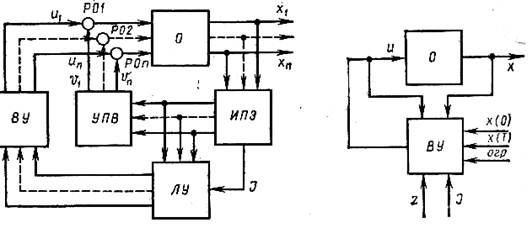 тропоезда, и в книге Т. Штейна (1926), где высказывалась идея регулирования топки парового котла по минимуму потерь в дымовой трубе. Далее экстремальные регуляторы исследовались и предлагались Ю.С. Хлебцевичем (1940, В.В. Казакевичем (1943), а также Цян Сюэ-сеня (1954).
тропоезда, и в книге Т. Штейна (1926), где высказывалась идея регулирования топки парового котла по минимуму потерь в дымовой трубе. Далее экстремальные регуляторы исследовались и предлагались Ю.С. Хлебцевичем (1940, В.В. Казакевичем (1943), а также Цян Сюэ-сеня (1954).
Рис.5.15.Принципиальная схема экстремального Рис.5.16.Принципиальная схема опти-
На рис.5.15 приведена функциональная схема экстремального управления с поиском. Устройство ИПЭ (измерения показателя эффективности), измеряющее координаты процесса и вычисляющее по ним показатель качества J=f(x1,…,
Xn), подключено к выходу объекта О. Устройство пробного воздействия УПВ генерирует пробные воздействия  на систему регулирующих органов. Логическое устройство ЛУ, получая информацию как о введённых воздействиях, так и об изменении под их влиянием J, анализирует эти данные и сообщает их вычислительному устройству ВУ, которое вырабатывает воздействия u1,…,un.
на систему регулирующих органов. Логическое устройство ЛУ, получая информацию как о введённых воздействиях, так и об изменении под их влиянием J, анализирует эти данные и сообщает их вычислительному устройству ВУ, которое вырабатывает воздействия u1,…,un.
Принцип оптимального управления можно применять в процессах, показатель эффективности которых зависит не только от текущих значений координат, но и от характера их изменения в прошлом, настоящем и будущем; показатель эффективности выражается некоторым функционалом от координат или от времени.
Нахождение оптимального управления требует решения достаточно сложной математической задачи методами вариационного исчисления или математического программирования (см. выше). Принцип поясняется на рис.3.6. На вход вычислительного устройства ВУ поступают информация о текущих значениях координат х с выхода объекта О, об управлении u, о внешних воздействиях на объект z, а также информация о различного рода внешних условиях; значения критерия оптимальности J, граничные условия [x(0) и x(T)] и различные ограничения на координаты (ОГР), управления и т.п. Вычислительное устройство по заложенной в него программе вычисляет оптимальное управления u.
Принцип адаптации применяется тогда, когда параметры системы под влиянием внешних факторов изменяются непредвиденным заранее образом настолько сильно, что движение системы претерпевает существенные качественные изменения. При этом рассмотренные выше принципы управления уже не дают возможности обеспечить нормальное функционирование системы и необходимо в процессе управления изменять параметры и даже структуру системы.
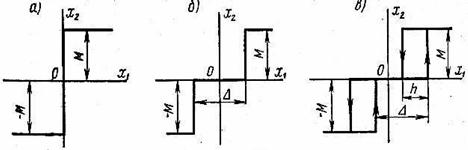 Рис.5.17.Примеры релейных характеристик
Рис.5.17.Примеры релейных характеристик
Общая принципиальная схема адаптивной системы аналогична схеме, приведённой на рис.5.16, и отличается от неё не видом, а алгоритмом, определяющим, определяющим действие управляющего устройства.
Как показано выше, в зависимости от вида сигналов различают непрерывные, релейные и импульсные САР (САУ).
 Особенностью непрерывных систем является то, что во всех элементах, составляющих систему, входные и выходные сигналы являются непрерывными функциями времени. К числу непрерывных систем относятся также системы с гармонической модуляцией. При этом для передачи сигнала могут быть использованы амплитудно - модулированные, частотно – модулированные колебания и колебания с модулированной фазой.
Особенностью непрерывных систем является то, что во всех элементах, составляющих систему, входные и выходные сигналы являются непрерывными функциями времени. К числу непрерывных систем относятся также системы с гармонической модуляцией. При этом для передачи сигнала могут быть использованы амплитудно - модулированные, частотно – модулированные колебания и колебания с модулированной фазой.








