 2014-02-02
2014-02-02 472
472Системы координат
Описание ИМ МР
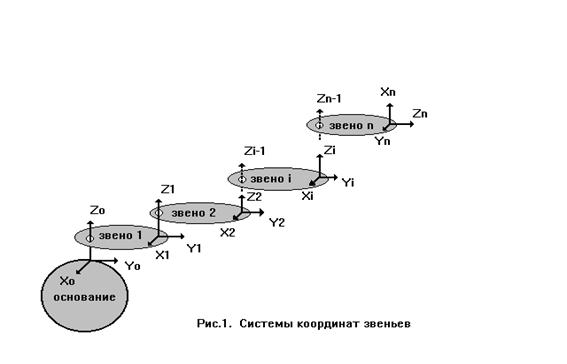
ИМ – многозвенный пространственный механизм. Звенья (тела – bodies) ИМ последовательно связаны между собой (образуют КП) таким образом, что образуют открытую (незамкнутую) линейную кинематическую цепь. Звенья ИМ – твердые тела. Каждая КП допускает относительное вращение или относительное линейное перемещение смежных звеньев в направлении только одной оси (шарнир «вращательного» типа – ВШ, вращательная кинематическая пара – ВП или шарнир «поступательного» типа – ПШ, поступательная кинематическая пара – ПП, соответственно). Первое звено ИМ связано с неподвижным основанием. Все звенья ИМ нумеруются, начиная от основания. Основанию ИМ присваивается номер 0.
С каждым из звеньев ИМ связывается правая прямоугольная (ортогональная) СК так, как показано на рис.1.1. CКi связана со звеном i. Ось Zi-1 СКi-1 совмещается с осью i-го сочленения. Начало СКi-1 – в центре i-го сочленения. Оси Xi-1 и Yi-1 направляются так, как удобнее. Целесообразно одну из этих осей направить вдоль звена i-1, а другую – в поперечном направлении. Ось Zn CКn обычно направляют вдоль последнего звена, на котором размещено захватное устройство манипулятора (ЗУМ) в сторону рабочей зоны. Начало CКn обычно размещают в центре ЗУМ. СК0 связывается с неподвижным основанием. Эта система координат в дальнейшем полагается инерциальной и называется «базовой».
- qi - угол поворота звена i относительно звена i-1 вокруг оси Zi-1, если i = [ВП] (рис. 1.2);
- si - линейное перемещение звена i относительно звена i-1 вдоль оси Zi-1, если i = [ПП].
Замечание:
- “i = [ВП]” следует читать “сочленение i – вращательного типа»,
- “i = [ПП]” следует читать “сочленение i – поступательного типа»,
i = 1,2,…,n.
Нулевые координаты сочленений соответствуют положению ИМ, которое принимается за исходное.
 |
Рис.1.2. Координаты сочленений ИМ








