 2014-02-02
2014-02-02 699
699В соответствии с законом Ампера на активные стороны секции якоря, находящейся в данный момент под током I, действует пара сил F, создающая вращающий момент  (рис. 2.9).
(рис. 2.9).
Рис. 2.9
Пара сил на рис. 2.9 вращает якорь против часовой стрелки. Направление тока в секциях ОЯ меняется на противоположное каждый раз при повороте якоря на 180 град. За счет этого направление вращающего момента во времени не изменяется.
Таким образом, если в генераторах ЩКУ выполняет роль механического выпрямителя, то в двигателях постоянного тока он выполняет роль механического инвертора, изменяющего направление тока в секциях ОЯ.
На рис. 2.10 показана схема двигателя постоянного тока параллельного возбуждения, для которой справедливы следующие уравнения:
– первое уравнение Кирхгофа
 , (2.11)
, (2.11)
где  ;
;
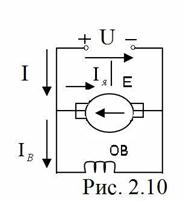 Уравнение электрического баланса цепи якоря
Уравнение электрического баланса цепи якоря
 , (2.12)
, (2.12)
где E=CenФ – ЭДС двигателя или противоЭДС.
В номинальном режиме  ≈ (0,9
≈ (0,9 0,95)U.
0,95)U.
При пуске двигателя постоянного тока  и противоЭДС Е = 0. При этих условиях
и противоЭДС Е = 0. При этих условиях

Для ограничения пускового тока в цепь якоря на время пуска последовательно включают добавочный резистор, ограничивающий ток якоря до безопасного значения , т.е.
, т.е.
По мере разгона двигателя противоЭДС увеличивается и в соответствии с уравнением (2.12) ток якоря будет уменьшаться до значения  . При этом резистор
. При этом резистор  закорачивается.
закорачивается.
Вращающий момент М двигателя постоянного тока определяется из выражения
 ,
,
где Р2 – полезная мощность на валу двигателя;
 –угловая скорость вала двигателя, рад/c (2.13)
–угловая скорость вала двигателя, рад/c (2.13)
n – частота вращения двигателя, об/мин.
Если пренебречь потерями холостого хода в магнитопроводе и подшипниках, то из энергетического баланса двигателя параллельного возбуждения следует  . С учетом выражений (2.11) и (2.12) получим
. С учетом выражений (2.11) и (2.12) получим
 . (2.14)
. (2.14)
Подставляя (2.14) и (2.13) в выражение для момента, найдем
 , (2.15)
, (2.15)
где  - константа по моменту двигателя.
- константа по моменту двигателя.
Механическая характеристика двигателя – это зависимость частоты вращения от момента на валу, т.е.
 .
.
Для двигателя параллельного или независимого возбуждения с добавочным сопротивлением в цепи якоря справедливо уравнение
 . (2.16)
. (2.16)
Откуда  (2.17)
(2.17)
Последнее выражение часто называют скоростной характеристикой двигателя. Подставляя в него ток из уравнения (2.15), получим аналитическое выражение механической характеристики
 , (2.18)
, (2.18)
где  -частота вращения якоря при холостом ходе.
-частота вращения якоря при холостом ходе.
На практике для двигателей независимого и параллельного возбуждения пользуются более удобной формулой для механической характеристики, в которую входят параметры, определяемые по данным технического паспорта. В указанных двигателях поток Ф остается практически постоянным, поэтому выражение (2.18) для электромагнитного момента можно записать

 , (2.19)
, (2.19)
где  – электромагнитный коэффициент двигателя.
– электромагнитный коэффициент двигателя.
Тогда выражение для противо-ЭДС двигателя с учетом уравнений (2.8), (2.13) и (2.15) примет вид:
 . (2.20)
. (2.20)
С учетом выражения (2.20) уравнение (2.12) можно записать как
 (2.21)
(2.21)
Подставляя в уравнение (2.21) выражение для тока из (2.19), получим
 (2.22)
(2.22)
Из уравнения (2.22) получим искомое выражение для механической характеристики
 (2.23)
(2.23)
Из уравнения (2.21) для номинальных значений параметров двигателя, приводимых в справочниках, получим
 . (2.24)
. (2.24)








