 2014-02-02
2014-02-02 5297
5297ЛЕКЦІЯ № 10
ТЕМА: „АВТОМАТИЗАЦІЯ ЗРОШЕННЯ”
Зрошення – це один з видів гідротехнічних меліорацій. За його допомогою змінюють водно-повітряний режим ґрунту, коли в природних умовах рослинам не хватає вологи. До складу зрошувальної системи входять: джерело зрошення, зрошувальна мережа, споруди і пристрої, що забезпечують забір, подачу і розподіл води по зрошуваному полю. Автоматизовані зрошувальні системи додатково мають комплекс технічних засобів, що забезпечують керування процесом зрошення без участі персоналу (автоматичні системи управління) або з його частковою участю (автоматизовані системи управління).
Зрошувальні системи відрізняються між собою способом подачі води, способом зрошення, конструкцією зрошувальної мережі, режимом роботи в залежності від ступеня забезпеченості поливною водою. За способом подачі води їх поділяють на самопливні і з машинним водопідйомом, за способом зрошення – із поверхневим поливом, дощуванням та з підґрунтовим зволоженням. У свою чергу поверхневий полив може проводитись по борознах, смугами і затопленням. При зрошенні дощуванням застосовують пересувні, напівстаціонарні і стаціонарні дощувальні установки. Конструктивно розрізняють системи з закритою і відкритою зрошувальною мережею.
Ці різновиди зрошувальних систем як об'єктів управління визначають структуру і алгоритми керування зрошенням, а також технічні засоби їх реалізації. Характер алгоритмів залежить і від ступеня забезпечення поливною водою. При повному забезпеченні керування здійснюється в залежності від вологозабезпеченості рослин, а при дефіциті води додатково вводяться критерії пріоритетності її розподілу між полями або і між окремими ділянками одного поля.
Найбільше складним при автоматизації зрошення є отримання достовірної інформації про вологість ґрунту або інтегральної оцінки – вологозапасу кореневмісного шару ґрунту. Надійність цієї інформації визначає ефективність управління процесом зволоження.
Автоматизація поверхневого поливу
Поверхневий спосіб зрошення відомий із стародавніх часів і був першим штучним способом зволоження ґрунту. Він порівняно простій, не вимагає застосування складних технічних засобів, у зв'язку з чим і в даний час знаходить широке застосування. Найбільш розповсюдженим є полив по борознах. Його використовують при закритій і відкритій зрошувальній мережі для зрошення просапних культур, садів і виноградників. На рис.10.1 представлена схема поливу по борознах із закритих трубопроводів. Вода з магістрального каналу 1 помповою станцією ПС подається в транспортуючий трубопровід 2, до якого через водовипускні механізми 4 приєднані трубопроводи 3. З поливних трубопроводів вода через водовипуски 5 подається в борозни, прокладені в міжряддях. Полив здійснюється по черзі з одночасною подачею води в один або два поливні трубопроводи у залежності від продуктивності помпової станції та конкретних умов. При цьому одночасно змочується 400...500 борозен, забезпечуючи зрошення на площі до 15 га.
Керування такою системою повинно забезпечити рівномірний і оптимальний за часом процес зволоження ґрунту, а також необхідні черговість і тривалість підключення поливних трубопроводів.
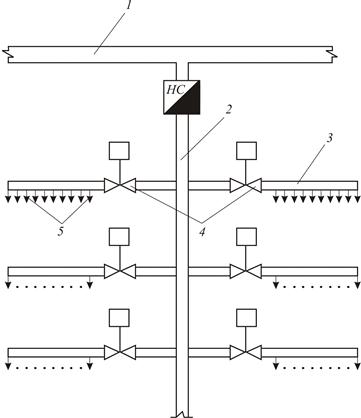
Рис. 10.1. Схема поливу по борознах із закритих трубопроводів.
Рівномірність подачі води в усі борозни забезпечують, відповідним розрахунком пропускної здатності водовипусків вздовж поливного трубопроводу з врахуванням втрат напору між ними. Так, при водовипусках у вигляді отворів витрата і -того водовипуску
 , /10.1/
, /10.1/
де  – коефіцієнт витрати, який залежить від форми отвору;
– коефіцієнт витрати, який залежить від форми отвору;  – площа отвору;
– площа отвору;  – напір в центрі отвору. З рівняння /10.1/ слідує, що для забезпечення
– напір в центрі отвору. З рівняння /10.1/ слідує, що для забезпечення  , добуток
, добуток  також повинен бути сталим. Цього досягають відповідною зміною вздовж поливного водопроводу.
також повинен бути сталим. Цього досягають відповідною зміною вздовж поливного водопроводу.
Оптимальний за часом процес зволоження забезпечується тим, що подача води в борозни здійснюється у два етапи. На першому етапі, коли відбувається замочування борозен, у поливному трубопроводі підтримується підвищений напір. За рахунок цього збільшується витрата з водовипусків, що призводить до зменшення часу добігання води в кінець борозни. На другому етапі, щоб уникнути розмиву борозен, напір зменшують, що призводить до зниження витрати і швидкості руху води. Цей режим продовжується доти,доки не буде забезпечена розрахункова норма зволоження, яку можна проконтролювати за вологістю у нижньому шарі ґрунту або за часом з врахуванням інтенсивності випаровування води з борозен. Отже, описаний процес зволоження зв’язаний з необхідністю визначення початку зволоження, моменту визначення добігання води в кінець борозни, зниження напору в поливному трубопроводі і кінця зволоження.
Всі ці операції може виконувати оператор або технічні засоби в автоматизованій системі.
На рис.10.1 наведена схема поливу і функціональна схема автоматизації на базі мікроконтролера, який здійснює наступний процес поливу: при зниженні вологості ґрунту до мінімально допустимого значення від давача вологості 6, який виробляє дискретні сигнали при мінімальному та оптимальному значеннях вологості, поступає сигнал на мікроконтролер МК, який формує команду на включення помпової станції ПС. Через заданий проміжок часу, який визначається часом пуску помпових агрегатів, МП подає сигнали на відкриття водовипускних механізмів, кількість і черговість яких наперед вводиться в пам’ять МП програмними засобами ПЗ. Вода поступає в поливні водопроводи, а із них – в борозни. Коли вода добіжить до кінця контрольної борозни, давач добігання 7 посилає сигнал і мікроконтролер передає на помпову станцію команду зменшити напір. На ПС це може бути здійснене відключенням одного з працюючих помпових агрегатів або зменшенням швидкості обертання помпи шляхом зміни числа пар полюсів асинхронного двигуна чи частоти живлення. При зниженому напорі зволоження буде продовжуватись доти, доки вологість ґрунту не досягне оптимального значення, про що „повідомить” мікроконтролеру давач вологості. Після цього починається полив наступних ділянок.
Щоби запобігти перезволоження ґрунту у випадку несправності давача вологості, мікроконтролер фіксує час поливу, і коли він досягне максимально допустимого значення, уже сам МП видає команди на закриття відкритих водовипусків і відкриття наступних згідно з режимом поливу всього поля, який записується в пам’ять МП програмними засобами ПЗ. При цьому полив наступних ділянок може здійснюватись за описаним алгоритмом, який фіксується в пам’яті МП, або з корекцією часу поливу шляхом введення відповідних перерахункових коефіцієнтів, які вводяться в МП завчасно.
Якщо є труднощі у використанні давачів вологості і добігання, то крім режимів зволоження в пам’ять мікроконтролера вводять час добігання і усереднений час зволоження ділянок, або окремо кожної ділянки. Але при такій автоматизації початок поливу повинен визначати оператор і ввести відповідну команду в МП.
В якості водовипускних механізмів часто використовують електромагнітні і гідравлічні клапани, а також гідравлічні засувки з дистанційним керуванням.
З метою економії електричної енергії слід застосовувати електромагнітні клапани. У цьому випадку від мікропроцесора повинні поступати сигнали у виді імпульсів напруги на котушку тягового електромагніта і на котушки електромагніта зачіпки. Якщо використати різнополярні імпульси, то до кожного електромагнітного клапана буде достатньо прикласти двох провідну лінію зв’язку.
При великих витратах в якості водовипускних механізмів використовують гідравлічні засувки з дистанційним керуванням, гідропривод. У цьому випадку також можна обійтись двох провідною лінією зв’язку і різнополярною напругою живлення котушок електромагнітів.
У тих випадках, коли економічно недоцільна прокладка ліній зв’язку між мікроконтролером і водовипускним механізмом, можна застосувати гідравлічні клапани і гідравлічну систему керування у виді імпульсів зниження тиску.
На рис.10.2 наведена конструктивна схема гідравлічного клапана з програмним переключенням поливного трубопроводу. Такі клапани встановлюють на початку кожного розподільчого трубопроводу і вони забезпечують подачу води в трубопроводи в заданій послідовності. Команди керування на всі клапани передаються одночасно у виді імпульсів зниження тиску в магістральному трубопроводі. Тиск води з магістрального трубопроводу сприймає еластична діафрагма 3, яка через шток 4 з'єднана з тарілчастим запірним органом 2. Під впливом пружини 5 запірний орган притискається до сідла і не пропускає воду в патрубок 1, що з'єднаний з розподільчим трубопроводом. Над штоком 4 знаходиться опорний диск 9, що повертається разом із колесом 8. Повертається за допомогою собачки, закріпленої на важелі 7. Цей важіль зв'язаний зі штовхачем, на кінці якого закріплений ролик 6, що западає у виріз у штоці. У паз 10 опорного диска може входити шток 4.
Клапан працює у такий спосіб. При підвищенні тиску води діафрагма прогинається і переміщує шток вгору до опорного диска. При цьому запірний орган залишається притиснутим до сідла, оскільки між кільцем 12 і корпусом ковпака 11 є зазор, трохи більший зазору між штоком і опорним диском. Разом зі штоком переміщується вверх штовхач, що піднімає важіль 7, і собачка, що знаходиться у зчепленні з колесом, повертає колесо на один крок.
При зниженні тиску під впливом пружини діафрагма разом зі штоком переміщується вниз до вихідного положення. У кожному наступному циклі зміни тиску храпове колесо разом з опорним диском повертається на один крок. Якщо над штоком появиться паз в опорному диску, то при підвищенні тиску шток входить у цей паз і клапан відкривається. Ступінь відкриття визначається глибиною паза. Якщо шток знаходиться в глибокій частині паза, то напір після клапана зростає. Це відповідає режимові замочування борозен. Поворотові диска ще на один крок відповідає перехід штока в менше глибоку частину паза, що призводить до прикриття клапана і напір у поливному трубопроводі знижується.
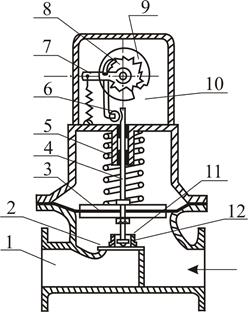
Рис. 10.2. Конструктивна схема гідравлічного клапана з програмним переключенням.
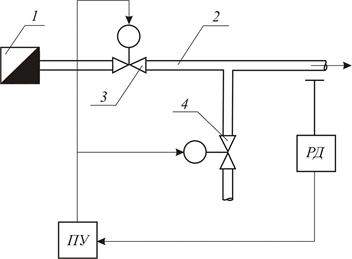
Рис. 10.3. Структурна схема формування імпульсів зниження тиску.
У цей проміжок часу відбувається дозволоження ґрунту. Для закриття клапана подають ще один імпульс зниження тиску в трубопроводах. Настроювання клапана здійснюється поворотом опорного диска відносно штока. Час дозволоження в пам’яті мікроконтролера вводиться за даними експериментів для конкретної системи і залежить від довжини борозни, водно-фізичних властивостей ґрунту, ухилу місцевості та інших факторів.
На рис. 10.3 наведена структурна схема формування імпульсів зниження тиску в трубопроводі для керування гідроклапанами. Програма формування імпульсів тиску закладається в пам’ять мікроконтролера МП, і є однією із підпрограм програми зрошення всього поля, яка вже описана вище. Вона починає виконуватись за сигналом давача. Для цього МП видає команду на закриття засувки з гідроприводом 3, через яку подається вода від насосної станції 1 у трубопровід 2, і на відкриття гідрозасувки зливу води з трубопроводу 4. В результаті відбувається зниження тиску в трубопроводі, що контролюється за допомогою реле тиску РТ. Реле РТ посилає сигнал в МП для відліку встановленої тривалості імпульсу зниження тиску. По закінченню цього часу МП посилає команду на закриття засувки 4 і відкриття засувки 3. Тиск у трубопроводах відновлюється, диск клапана повертається на один крок, і продовжується полив при зниженому напорі згідно зі встановленою програмою.
Перевагою системи програмного керування з використанням гідроклапанів є відсутність ліній зв'язку з водовипусками на розподільчих трубопроводах. Недолік – більш складна конструкція гідроклапана і ручна настройка черговості їх включення.
Окрім систем поливу з трубопроводів широко використовуються системи з відкритою зрошувальною мережею поливу по борознах зі зрошувальних лотків. На рис. 10.4, а показано схему зрошувальної мережі, а на рис. 10.4,б – технологічну схему розподілу води з поливного лотка в борозни.
Система працює в такий спосіб. З внутрішньогосподарського каналу 1 через регулятори витрати FC, уставками яких задається поливна норма, вода подається в поливні лотки 2. Регулятори рівня LC служать для регулювання витрати під час поливу. Після включення поливного лотка регулятором витрати FС вступає в дію перший найближчий регулятор рівня, що підтримує підвищений рівень у першому б'єфі і, як наслідок, подачу більшої витрати води через водовипуски в борозни. Після зменшують уставку першому регулятору, внаслідок чого рівень води в секції падає і вступає в дію наступний регулятор. В усталеному режимі в другий б'єф подається максимальна витрата, а через водовипускні отвори першої секції лотка із-за зниження рівня подаваної води витрата зменшується. В результаті відбувається дозволоження борозен першої секції, а зволоження борозен другої секції відбувається при максимальній витраті. Наступні секції включаються в роботу в такій же послідовності. При використанні гідравлічних регуляторів їх установки змінює оператор. Він же контролює і тривалість поливу. При використанні гідравлічних регуляторів з дистанційним керуванням процес поливу можна автоматизувати на базі мікропроцесора за описаною вище технологією.
З одного поливного лотка при доброму плануванні полів можна зрошувати до 35...40 га.
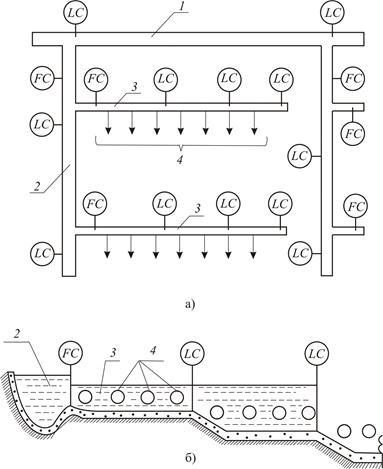
Рис. 10.4. Схема зрошення по борознах з поливних лотків.
Особливим видом поверхневого поливу є зрошення рисових чеків, що, як правило, тривалий час знаходяться у затопленому стані. Керування зрошенням таких систем в основному зводиться до підтримки необхідного рівня води в затоплених рисових чеках. Вода в чеки подається через трубчасті водовипуски, обладнані гідравлічними регуляторами рівня, що забезпечують підтримку заданого рівня з точністю ±10 мм, що відповідає технологічним вимогам.
На рисових системах, розташованих у зонах, де можливі значні опади, обов’язково встановлюють пристрої для автоматичного відводу надлишкових вод. Для цього застосовують зливальні споруди зі зливальними порогами, або гідравлічні регулятори сифонного типу. В результаті при досягненні гранично припустимого високого рівня води в чеку починається її скидання.
Автоматизація зрошення рисових чеків, які розташовані в зоні з підвищеною засоленістю і високими літніми температурами, вимагає контролю сольового складу води і температури. Для цього, крім автоматичних регуляторів водоподачі встановлюють і гідравлічні регулятори водовідведення води із чеків, які керуються сигналами солемірів і давачів температури. В якості таких регуляторів можна використати мембранні регулятори з дистанційним керуванням.
В наслідок тривалого випаровування вміст солі у воді досягне граничного значення, тоді від солеміра поступає сигнал на відкриття регулятора водовідведення. При цьому рівень води в чеку знижується, що призводить до збільшення подачі води регулятором водоподачі. Свіжа вода розчиняє сіль і її концентрація зменшується. Такий процес подачі і скиду води продовжується доти, доки концентрація солі не знизиться до нормального рівня. Після цього солемір подає сигнал на закриття регулятора водовідведення, і регулятор водоподачі стабілізує встановлений раніше рівень води в чеку.
Аналогічно відбувається і процес зниження температури води в чеку у тому випадку, коли вона нагрівається до граничнодопустимого значення. Тільки сигнали керування регулятору водовідведення посилає давач температури.
Автоматизація краплинного зрошення
При краплинному зрошенні вода під невеликим тиском (0,03...0,28 МПа) подається по розгалуженій мережі розташованих над поверхнею поля або в ґрунті пластмасових труб невеликого діаметра через приєднані до них крапельниці до коренів рослин малими дозами. У порівнянні з традиційними методами краплинне зрошення дозволяє ефективно використовувати поливну воду, знижуючи до мінімуму непродуктивні втрати на випаровування і глибинну фільтрацію, що особливо важливо для районів з обмеженими запасами водних ресурсів. Краплинне зрошення використовують на будь-якому рельєфі місцевості. Найчастіше його використовують для поливу садів і виноградників.
Керування системою краплинного зрошення зводиться, в основному, до забезпечення необхідної послідовності зволоження окремих ділянок, тривалості їх зрошення, що при сталому тиску у зволожувальних трубопроводах визначає норму поливу і забезпечує рівномірність зрошення всієї площі поля.
Розрізняють пасивне й активне керування. Пасивне полягає в регулюванні крапельниць для того, щоб забезпечити рівномірну витрату води через них незалежно від їх розташування по довжині трубопроводу, а також рельєфу місцевості. Активне керування здійснюється в процесі роботи системи. Воно забезпечує черговість і тривалість зрошення окремих ділянок з метою підтримки необхідної вологості ґрунту. Існують системи програмного керування і системи автоматичного керування зі зворотними зв'язками за вологістю ґрунту та збурюючими факторами – температурою і вологістю приземного повітря, випаровуванням тощо.
На рис. 10.5 представлена схема системи програмного керування краплинним зрошенням. Зрошувана площа ділиться на окремі ділянки (модулі). Зволожувальна трубопровідна мережа ЗМ кожної ділянки з’єднується з магістральним трубопроводом МТ електромагнітними клапанами ЕК1–ЕК4. Вода в магістральний трубопровід подається через фільтр Ф і клапан ЕКМ від помпової станції ПС. Програма керування помповою станцією і клапанами задається мікроконтролером МК. Програму керування, що задає черговість і тривалість зрошення окремих модулів, складають на добу або більш тривалий час за даними біокліматичних спостережень. Система реалізується електричними засобами. Вода у зрошувальні трубопроводи модулів подасться через клапани з електромагнітним приводом, яким керує мікропроцесор по кабельним лініям. Недолік системи програмного керування – відсутність зворотного зв'язку з об'єктом зрошення(кореневмісним шаром ґрунту) і контроль його стану.
Ділянка краплинного зрошення як об'єкт керування характеризується порівняно малою ємністю і незначним транспортним запізненням, тому що вода подається безпосередньо до коренів рослин. Це створює сприятливі умови для створення систем автоматичного керування зі зворотним зв'язком за вологістю кореневмісного шару.
На рис. 10.6 представлена функціональна схема автоматичного керування краплинним зрошенням саду на базі комп’ютерно-інтегрованої системи. Сад розташований на схилі гір і розділений на шість модулів площею в кілька гектарів. Зрошувальна трубопровідна мережа кожного модуля через електромагнітний клапан з’єднана з магістральним трубопроводом МТ. Вода в магістральний трубопровід подається самопливом із двосекційного резервуара через фільтр очищення Ф і магістральний клапан ЕКМ. У резервуарі відбувається природний підігрів води, а двосекційне виконання сприяє випаданню осадів. Керування зрошенням здійснюється комп’ютерно-інтегрованою системою КІС, яка виконує функції збору, обробки інформації і формування команд керування. Послідовним опитуванням в КІС через пристрій вводу подається інформація від випарника-опадоміра ВО, який вимірює сумарні втрати води на випаровування і поповнення за рахунок опадів, давача рівня ДР води в резервуарі, від витратоміра В, який контролює витрату води на зрошення, а також від станцій вимірювання параметрів мікроклімату СВПМ, встановлених на кожному модулі. У комплект СВПМ входять прилади для вимірювання температури, відносної вологості приземного повітря і вологості ґрунту. В Якості вимірювача вологості ґрунту використовують ємнісні високочастотні вологоміри.

Рис. 10.5. Схема системи програмного керування краплинним зрошенням.
На підставі цієї інформації комп’ютер виконує за заданими оператором вхідними даними і програмним забезпеченням розрахунок норм зволоження кожної ділянки і посилає команди керування на відповідні електромагнітні клапани через пристрій виводу команд ПВК.
В подальшому система безперервно коригує норму поливу за даними станції вимірювання параметрів мікроклімату і випарника-опадоміра. При цьому фактична витрата води на зрошення контролюється витратоміром, але вона не вся попадає у ґрунт. Тому кінець зрошення визначається за даними вологоміра.
Одночасно зрошується одна ділянка. Черговість зрошення може задавати оператор, або визначати у залежності від вологості ґрунту на ділянках: зволоження починається з ділянки, вологість ґрунту на якій найнижче, але вища за мінімально допустиму.
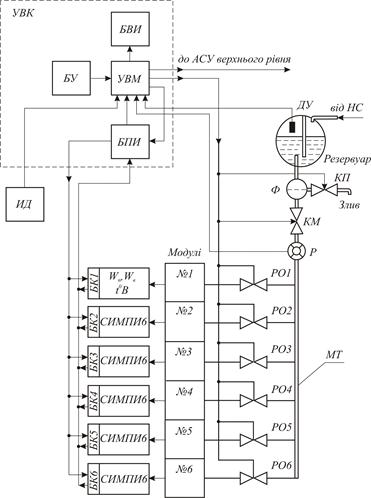
Рис. 10.6. Схема системи автоматичного керування краплинним зрошенням на базі обчислювального комплексу.
Коли вологість ґрунту на будь-якій ділянці вища допустимої норми (наприклад при випаданні опадів), то зрошення не проводиться. Оскільки зволоження кожної ділянки досить тривале, то з метою економії енергії і ліній зв’язку станції мікроклімату живляться централізовано тільки на час зрошення ділянки. Тому в системі передбачено адресне включення живлення станцій комп’ютером через блок живлення БЖ і відповідні комутуючі пристрої станцій.
В системі передбачене автоматичне керування промиванням фільтра за заданою періодичністю. При промиванні вода через клапан ЕКП йде на злив.
Розглянута система керування має зв'язок з АСУ верхнього рівня, яка поєднує окремі зрошувальні системи господарства, оптимізуючи їх роботу. Зокрема, розподіляє воду заповнення між системами краплинного зрошення, у посушливі періоди при дефіциті зрошувальної води коригує норми поливу, виходячи із наявного об’єму зрошувальної води та можливостей її поповнення.
Автоматизація стаціонарних дощувальних систем
Дощування – це найбільш прогресивний і розповсюджений спосіб зрошення. Його застосовують на всіх типах ґрунтів і при будь-якому рельєфі місцевості, воно підвищує вологість і знижує температуру в приземному шарі повітря, добре піддається автоматизації. Розрізняють пересувні, напівстаціонарні і стаціонарні дощувальні системи.
У пересувних всі елементи, включаючи насосну станцію, трубопроводи і дощувальні апарати, розташовані на мобільному агрегаті, як правило, із приводом від двигуна внутрішнього згоряння. Їх використовують на порівняно рівному рельєфі місцевості з водозабором з відкритих каналів. Прикладом пересувної системи зрошення є система агрегатів типу ДДА-100М. Оператор (він же водій) виконує функції керування рухом агрегату, водозабором і зрошенням.
У напівстаціонарних системах насосна станція і мережа водоподачі нерухомі, а дощувальні агрегати поливають у русі або позиційно. Сюди відносять системи, у яких зрошення здійснюється широкозахватними дощувальними машинами «Волжанка», «Фрегат», «Дніпро» та «Кубань».
В стаціонарних системах всі елементи нерухомі. Для них характерна широко розгалужена мережа трубопроводів, велика кількість дощувальних апаратів на одиницю площі, що вимагає значних витрат. Ці системи застосовують для зрошення площ на сильно пересіченій місцевості, включаючи гірські схили, а також для зрошення садів, виноградників, чайних плантаций тощо. Стаціонарні системи в найбільшій мірі піддаються автоматизації, яка зводиться, в основному, до керування водовипускними механізмами.
Розрізняють автоматизовані й автоматичні системи керування зрошенням. В автоматизованих системах зрошення здійснюється за заданою програмою, яку складають на базі даних біокліматичних спостережень і прогнозів з урахуванням особливостей зрошуваного масиву і фази розвитку рослин. Контроль за роботою системи здійснює оператор.
Відмінною рисою автоматичних систем є наявність зворотного зв'язку зі зрошуваним полем. Вимірювальні давачі контролюють один або кілька параметрів ґрунту і оточуючого середовища, наприклад, вологість ґрунту, вологість і температуру приземного повітря, інтенсивність сонячної радіації, випаровування, кількість опадів тощо. Після обробки за заданим алгоритмом інформації, що надходить, формуються команди керування без участі людини.
На рис. 10.7 наведена схема програмного керування стаціонарними дощувальними апаратами з електромагнітними клапанами. Таку систему використовують для зрошення садів, виноградників та ягідних плантацій. Від помпової станції магістральним трубопроводом М вода подається в роздавальні трубопроводи Р1— Р4 через клапани з електромагнітним приводом ЕК1–ЕК4. Підключення дощувальних апаратів А1–А16 до роздавальних трубопроводів здійснюється електромагнітними клапанами ЕМ1–ЕМ16. Послідовність і час роботи дощувальних апаратів встановлюється за допомогою мікроконтролера з дискретними виходами, який знаходиться на помповій станції. Використання матричного принципу вибору черговості включення дощувальних апаратів дозволяє скоротити число проводів у лініях зв'язку.
При замиканні одного з контактів Т1–Т4, наприклад, Т4 живлення подається на котушку електромагніта клапана ЕК1. Відбувається наповнення водою з магістрального трубопроводу підключеного роздавального трубопроводу Р1. Одночасно «плюс» джерела живлення надходить на котушку електромагнітів клапанів ЕМ1–ЕМ4. Замиканням одного з контактів В1–В4 вихідних реле мікроконтролера 3, наприклад, В1, подається «мінус» джерела живлення на електроклапан ЕМ1. У результаті спрацьовує електромагніт клапана, тому що на нього раніше був поданий позитивний потенціал, і вода з роздавального трубопроводу Р1 подається па групу дощувальних апаратів А1. Відповідною комбінацією замикання контактів Т1–Т4 і В1–В4 можна подать воду на будь-яку групу дощувальних апаратів А1–А16.
За рахунок матричного методу вибору включення електроклапанів кількість проводів лінії зв'язку скорочується до дев'яти замість сорока при їх окремому підключенні.
Програму роботи системи формує мікроконтролер. Контроль виконання команд і справності системи здійснюється за величиною струмів, що протікають у колах котушок електромагнітів клапанів, і витраті води в магістральному трубопроводі. З цією метою в коло джерела живлення включають амперметр, а на магістральному трубопроводі встановлюють витратомір (прилади на схемі не показані).
Діагностику несправностей роблять за показниками приладів. Так, якщо не змінилися показання амперметра після подачі команди на включення електромагнітного клапана, то відбувся обрив у лінії або котушці електромагніта. Неприпустимо велике значення струму свідчать про ймовірне коротке замикання в колі. Почерговою вибірковою подачею команд на включення електромагнітів можна виявити ушкоджену лінію або несправний електромагнітний клапан.
Якщо при нормальному значенні струму в колі живлення після включення електромагнітного клапана не відбулося зміни витрати води в трубопроводі, то можна припускати вихід з ладу відповідного дощувального апарата або засмічення підвідного трубопроводу.
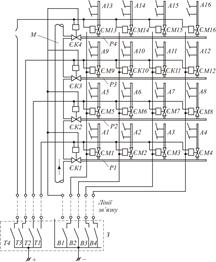
Рис. 10.7. Схема програмного керування стаціонарними дощувальними апаратами.
Великі витрати води в порівнянні з номінальними будуть свідчити про порив у трубопровідній мережі. В автоматичних системах діагностика несправностей реалізується мікроконтролером за описаним алгоритмом.
Розглянута система характеризується високою надійністю і гнучкістю в керуванні. Недоліком є необхідність прокладки ліній зв’язку, що зв'язано з додатковими витратами.

Рис. 10.8. Схема роботи клапана послідовного переключення.
Крім електромагнітних клапанів найчастіше використовують клапани послідовного переключення. На рис. 10.8 показана схема роботи клапана послідовного переключення, що має один вхідний 4 і два вихідних 1 і 3 патрубки. Через патрубок 1 вода транзитом переходить у наступну секцію трубопроводу, а через патрубок 3 – подається до дощувального апарата. Запірний орган являє собою кулю 2, зв'язану зі штоком, який прикріплений до рухомої діафрагми 5. Діафрагма по напрямних може переміщатися у вертикальному напрямку у середині ковпака 7. Керування клапаном виробляється імпульсами зниження тиску води у трубопроводі.
Клапан працює у такий спосіб. Якщо вода не подається в трубопровід, то куля 2 знаходиться в положенні А. При подачі води під дією тиску водного потоку куля притискається до вихідного отвору 1 і перекриває подачу води в наступну секцію трубопроводу. Через патрубок 3 вода надходить до дощувального апарата (положення Б). При подачі імпульсу зниження тиску запірна куля відходить від патрубка 1 і під дією пружини 6 і сили, що її виштовхує, підтягується нагору. Після повторного збільшення тиску куля перекриває патрубок 3, припиняючи подачу води до дощувального апарата, і через патрубок 1 вода надходить у наступну секцію трубопроводу (положення В). У вихідне положення клапан повертається після спорожнення трубопроводу.
На рис. 10.9 представлена схема зрошувальної системи з клапанами послідовної дії. Вона складається з помпової станції 1, мікроконтролерного пристрою керування помповою станцією, що забезпечує формування імпульсів зниження тиску 2, роздавального трубопроводу 3, поливних трубопроводів 4 з установленими на них клапанами 5, через які вода подається до дощувальних апаратів або в наступну секцію трубопроводу.

Рис. 10.9. Схема керування дощуванням з клапанами послідовної дії.
З поливних трубопроводів вода через перший ряд клапанів подається до першого ряду дощувальних апаратів. Після надходження імпульсу зниження тиску подача води до цих дощувальних апаратів припиняється і включається другий ряд, потім третій і т.д. В результаті полив відбувається смугами всієї зрошуваної площі. Норма поливу задається часом включення поливних трубопроводів за допомогою пристрою 2.
Перевага такої системи – простота керування і порівняльна надійність. Однак вона дозволяє змінювати норму поливу тільки строго по смугах, що не завжди задовольняє технологічним вимогам, і крім того, вихід з ладу одного з клапанів порушує роботу всіх розташованих за ним.

Рис. 10.10. Блок-схема керування по сумарній радіації.
Підвищення гнучкості керування системою досягається заміною клапанів послідовного переключення гідроклапанами з програмним керуванням (рис. 10.2). Система керування така ж, як і при поверхневому поливі з використанням цих клапанів. Однак за надійністю і гнучкістю керування поступаються системам з використанням електричних виконавчих механізмів, що зумовлено більш складною конструкцією гідроклапанів, можливістю виникнення гідравлічних ударів при формуванні керуючих імпульсів перепаду тиску, що негативно впливає на роботу трубопроводів і гідроклапанів. Тому гідроклапани найчастіше застосовують у системах з порівняно невеликою довжиною трубопроводів.
Подальшим удосконалюванням керування стаціонарними дощувальними системами за заданою програмою є введення зворотного зв'язку за вологістю ґрунту. З цією метою на контрольній ділянці встановлюють давач вологості ґрунту з електричним аналоговим виходом. При зниженні вологості ґрунту до нижньої межі формується сигнал який включає в роботу програмний пристрій керування дощувальною системою. Виконується один цикл зрошення заданої тривалості. Якщо в результаті поливу вологість ґрунту досягла встановленого значення, то наступне включення системи зрошення не відбувається. Коли вологість ґрунту не досягне встановленого значення, то формується наступний імпульс, тривалість якого пропорційна різниці між встановленим і фактичним значеннями вологості. Як давачі вологості використовують тензіометри або ємнісні вологоміри з аналоговими виходами.
Розроблена також система керування зрошенням із пристроєм, що враховує сумарну сонячну радіацію за визначений проміжок часу. Алгоритм керування ґрунтується на залежності між потребою сільськогосподарських культур у воді і сонячною радіацією.
На рис. 10.10 наведена блок-схема такого пристрою. Сонячна радіація сприймається напівпровідниковим фотоелементом ФЕ, який через перетворювач П живить формувач імпульсів ФІ. Робота формувача імпульсів заснована на інтегруючій властивості конденсатора. При досягненні встановленої напруги на конденсаторі відбувається його розряд і формування імпульсу, який подається на лічильник імпульсів СІ. З деякою затримкою з лічильника надходить сигнал на повну розрядку конденсатора і його підготовку для наступної зарядки. Після визначеної кількості імпульсів лічильник З подає команду на програмний пристрій ПП керування дощувальною системою ДС. Здійснюється один цикл зрошення з установленою нормою поливу. Подальше включення програмного пристрою відбувається тільки після надходження наступної команди з лічильника імпульсів. Однак така система не враховує опадів, що є істотним її недоліком. Цей недолік можна усунути за допомогою вологоміра, який може коригувати норму зрошення.
Поряд з дощувальними апаратами безперервної дії на стаціонарних системах застосовують апарати імпульсної колової дії. Вони з визначеним інтервалом «вистрілюють» порцію води і після повороту на заданий кут імпульс повторюється. Імпульсне дощування створює сприятливий для розвитку рослин мікроклімат у приземному шарі повітря. Його використовують при зрошенні садів, виноградників та овочевих культур.
Автоматизація систем імпульсного дощування ґрунтується на тих же принципах, що і стаціонарних систем з дощувальними апаратами безперервної дії.
Серед апаратів імпульсного дощування відомий апарат «АЇДА» (рис. 10.11). Він складається з бака 1, який через вентиль 11 з’єднаний з напірним трубопроводом. Через трубу 2 бак також з'єднаний з робочою камерою 10 механізму формування поливного імпульсу, основна частина якого – диференціальний клапан, складається з поршня 5, запірної тарілки закриття ствола 6, з'єднаної жорстко з поршнем штоком. Ліворуч від поршня 5 знаходиться «сухий» відсік механізму формування імпульсу. У ньому розташований направляючий шток 3 з поворотною пружиною 4 притиснення запірної тарілки 6 до сідла 7.
Апарат працює в такий спосіб. При надходженні води в напірний бак тиск у ньому поступово зростає і через трубу 2 передається в робочу камеру 10, впливаючи на поршень 5 і запірну тарілку 6. Оскільки діаметр поршня більше діаметра тарілки, то під дією різниці сил долається опір пружини 4, тарілка відходить від сідла і вода поступає у ствол апарата. При цьому сили тиску води впливають на запірну тарілку з двох сторін і взаємно зрівноважуються, а поршень під дією сили тиску, долаючи протидію пружини 4, разом з направляючим штоком 3 і запірною тарілкою переміщується вліво – униз. Відбувається повне відкриття вхідного отвору і вода спрямовується в ствол. Одночасно через тягу 8 переміщення передається на розсікач струменя 9, який повністю відкриває вихід стовбура, і видається поливний імпульс. У результаті витрати води з бака, який не заповнюється подачею через вентиль 11, тиск на поршень поступово зменшується. Запірна тарілка, переміщуючись вправо – вверх, прикриває подачу води в ствол. Одночасно розсікач прикриває вихід ствола і відбувається дроблення струменя. Дальність її польоту зменшується і здійснюється полив площі, розташованої ближче до місця установки апарата. В міру подальшого зниження тиску тарілка наближається до сідла і згодом подача води в ствол
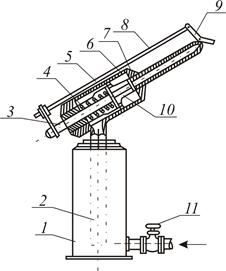
Рис. 10.11. Схема імпульсного дощувального апарата «АЇДА».
припиняється цілком. Знову відбувається наповнення напірного бака і цикл повторюється.
Рух штока 3 використовується і для повороту ствола дощувального апарата на заданий кут, забезпечуючи круговий полив. Механізм повороту на рис. 10.11 не показано.
Тривалість імпульсу поливу 3...5 с, паузи – 6...12 с. Регулюється вона вентелем 11 і заміною насадки на стволі апарата. Дальність польоту струменя при тиску води 0,6 МПа складає близько 25 м.
Автоматизація напівстаціонарних дощувальних систем
Напівстаціонарні дощувальні системи побудовані на базі використання широкозахватної дощувальної техніки зі стаціонарною мережею водоподачі і розраховані на зрошення порівняно великих площ. Вони дозволяють ефективно використовувати поливну воду, скоротити довжину зрошувальної мережі, підвищити коефіцієнт використання зрошуваних земель.
Найпростішою широкозахватною дощувальною машиною є пересувний колісний трубопровід ДКШ-64 «Волжанка» зі шириною одного крила у 400 м. Фронтальне переміщення здійснює привод від двигуна внутрішнього згоряння. Машина призначена для зрошення багаторічних трав, овочевих культур, пасовищ тощо, коли висота вирощуваних культур у період вегетації не перевищує 1,5 м. Автоматизація керування цією машиною не передбачена. Підключення до гідранта і спостереження за синхронністю руху трубопроводу робить поливальник. Для визначення початку поливу можна використати вологомір-сигналізатор із флажковим сигнальним пристроєм.
Більше досконалою є дощувальна машина з фронтальним переміщенням з електричним приводом ДФ-120 «Дніпро», у якої роздавальний трубопровід довжиною до 450 м розташований на візках висотою 2,1 м, що дозволяє поливати високостеблеві культури. Полив здійснюється позиційно. Вода подається від гідрантів, установлених на закритій зрошувальній мережі через 54 м. Робочий напір складає 0,4...0,5 МПа. На кожному з 17 візків встановлено асинхронний трифазний електродвигун з короткозамкненим ротором потужністю 1,1 квт, який через редуктор і ланцюгові передачі обертає колеса візка. Усі двигуни живляться по кабелю від пересувної електростанції, змонтованої на тракторі ЮМЗ-6JI. Напруга живлення складає 220 В. Електропривод машини має систему синхронізації і захисту, що забезпечує рівномірний рух всіх візків і обмежує вигин трубопроводу. На рис. 10.12, а представлена схема синхронізації руху візка і захисту, а на рис. 10.12, б – спрощена електрична схема керування двигуном візка.
Живлення від електростанції до асинхронних двигунів подається кабелями. Для підключення силових кабелів на обох кінцях машини є штепсельні рознімання. На кожному візку встановлено електричний щиток, до якого через штепсельні рознімання під’єднують силовий кабель, кабель керування і сигналізації. В щитку встановлений магнітний пускач керування двигуном візка. Для спостереження за положенням машини у нічний час на щоглах ферм установлені сигнальні лампи EL (рис. 10.12,б). Вони вмикаються одночасно з подачею живлення на двигуни візків. Колір сигнальних ламп на першій і останній фермах, що визначають габарити, червоний, на проміжних – білий.
Механізм синхронізації і захисту (рис. 10.12, а), з'єднаний тягами 5 з роздавальним трубопроводом 1, складається зі штанги 2, яка при прогині трубопроводу 1, пересуваючись між опорними роликами 3, через трос 4, барабан 6 повертає кулачковий вал 11, який діє на кінцеві вмикачі 12. При аварійному вигині дія передається на ртутні контакти 8.
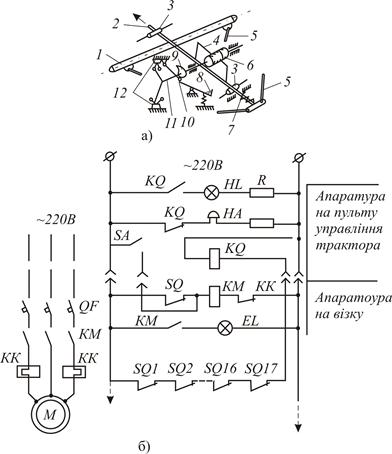
Рис. 10.12. Схема синхронізації руху (а) і спрощена електрична схема керування двигуном електропривода візка (б).
Якщо візок випереджає сусідні, то кулачковый вал 11, повертаючись, розмикає верхній кінцевий вимикач 12 (на рис. 10.12, б контакт SQ), який відмикає живлення котушки магнітного пускача КМ приводного двигуна М і візок зупиняється. Після вирівнювання трубопроводу, яке відбувається з рухом сусідніх візків, штанга 2 під дією пружини 7 займає нормальне положення, замикаються контакти кінцевого вимикача 12, через які знову подається живлення на котушку магнітного пускача КМ. Включається асинхронний двигун і візок починає знову рухатись.
Якщо вигин трубопроводу між візками стає граничнодопустимим, то кулачок 9, закріплений на валу 11, повертаючись, впливає на ролик 10, закріплений на кінці важеля, і через коромисло діє на розмикання ртутного контакту 8 (на рис. 10.12,б один із контактів SQ1—SQ17). У результаті розривається ланцюг живлення сигнального реле KQ, яке своїми контактами відмикає аварійну сигнальну лампочку HL на пульті керування трактора і вмикає сигнальний дзвоник НА.
Вирівнювання візків можна робити і з пульта керування трактора шляхом вибіркового включення двигуна того або іншого візка вимикачами SA. Ними, в основному користуються при налагодженні дощувальної машини. Захист двигуна від короткого замикання і перегріву здійснюється автоматичним вимикачем QF і тепловими реле КК.
Полив з відкритих каналів здійснює дощувальна електрифікована машина фронтального переміщення ДЕМФ-170 «Кубань». Машина широкого призначення, нею можна поливати і високостеблеві (до 3 м) культури. Складається вона з двох крил загальною довжиною трубопроводу до 800 м. На машині встановлені 294 коротко-струминні дощувальні апарати. Середня інтенсивність дощу складає 1,2 мм/хв, середня робоча швидкість руху – 2,0 м/ хв. Кожне крило має до 16 опорних візків. Колеса візків пневматичні. У середній частині машини розташований центральний проліт (рис. 10.13), на якому на рамі 5 розташований дизель-генераторно-насосний агрегат 6. Дизельний двигун потужністю 121,3 квт є приводом насосного агрегату, що подає воду з каналу в трубопровід машини з номінальним напором на вході 0,31...0,34 МПа, і трифазного синхронного генератора, який живить асинхронні двигуни з короткозамкненим ротором пересування машини, установлені на кожному опорному візку. Потужність кожного електродвигуна складає 1,2 квт, напруга живлення – 380 В. Керування двигунами здійснюється реверсивними магнітними пускачами, що забезпечують рух машини в двох напрямках. Всмоктувальний трубопровід утримується на плаву в каналі за допомогою поплавця 1. Трубопровід 3 закріплюється на опорних візках 7. Колеса візків приводяться у рух електродвигунами. Обидва крила трубопроводу кріпляться до центральної частини за допомогою шарнірних з'єднань 4.
До основних пристроїв автоматики дощувальної машини відносяться система прямолінійності, руху, система синхронізації руху візків і захисту від недопустимого вигину трубопроводу. Напрямок руху машини задається променем лазера, який закріплюють на стояку біля берега каналу. На центральному прольоті розташовують три фотодавачі, які спиймають промінь. При відхиленні від курсу правий або лівий (у залежності від напрямку відхилення) фотодавач засвічується і формується сигнал на зміну співвідношення часу руху і паузи кінцевого візка випереджального крила, що призводить до зменшення середньої швидкості його руху. Через тросову систему синхронізації сповільнюється рух проміжних візків і машина поступово розвертається навколо центрального візка. Цей процес буде продовжуватись доти, доки лазерний промінь не засвітить середній фотодіод, що відповідатиме прямолінійному руху машини. При наближенні машини до стояка лазера спеціальний щуп формує сигнал на зупинку машини.

Рис. 10.13. Схема центрального прольоту машини «Кубань».
Система синхронізації руху візків, яка забезпечує прямолінійне положення трубопроводу машини «Кубань» аналогічна системі синхронізації руху візків машини «Дніпро».
Крайні візки є ведучими і швидкість їх руху визначає тривалість проходу зрошуваного поля, а отже, і норму поливу. Режим їх руху задається за допомогою програмних реле часу. Він може бути безперервним або переривчастим. При цьому тривалість включення і паузи (зупинки) змінюється в межах 1... 100 с.
Машина має захист від аварійних ситуацій: неприпустимих (більш ніж на 300 мм) відхилень від курсу і зміщення одного візка щодо сусідніх більше, ніж на 700 мм, пробуксовки і тривалої зупинки машини з поливом, падіння рівня води у каналі, підсмоктування повітря або засмічення фільтра водозабірника, спадання напору води на вході в машину, короткого замикання або перевантаження приводних електродвигунів. При виникненні аварійної ситуації автоматично виключається дизельний двигун і машина зупиняється. Система автоматки не вимагає постійної присутності обслуговуючого персоналу при її роботі.
В США створена автоматизована широкозахватна (ширина захвату 800 м) дощувальна машина фронтальної дії з дизель-електричним приводом, що отримує воду з закритого трубопроводу. Конструктивне виконання, включаючи елементи автоматичної підтримки напрямку руху і синхронізації руху візків, аналогічні машині «Кубань». Її особливість – наявність двох гнучких під’єднуючих шлангів, з'єднаних з роздавальним трубопроводом машини і розташованих на окремих візках-роботах, якими керує система автоматичного пошуку гідрантів і підключення до них.
Полив проходить безперервно. При живленні машини від одного гнучкого шланга візок-робот з другим шлангом рухається до сусіднього гідранта. Після наближення візка-робота до гідранта автоматично здійснюється центрування шланга відносно гідранта, і їх з'єднання. Надалі відкривається запірний орган гідранта і вода поступає у трубопровід машини. Під’єднаний раніше шланг автоматично відключається від гідранта, і візок-робот рухається до наступного гідранта. Потым цикл повторюється. Відстань між гідрантами близько 14 м. Машина працює без обслуговуючого персоналу.
Крім машин фридального переміщення використовуються також дощувальні машини, які рухаються по колу. До них відносяться дощувальна машина «Фрегат», яка має гідравлічний привод і працює від закритої зрошувальної мережі. Вона рухається навколо нерухомої опори, з’єднаної з гідрантом подачі води. Гідроприводи встановлені на кожному візку і працюють за рахунок енергії зрошувальної води. Число візків може складати 7 – 20, а віддаль між ними – 25...30 м. Максимальна довжина трубопроводу 571 м. Система автоматики забезпечує синхронізацію руху візків, захист від аварій і регулювання норми поливу.
На рис. 10.14 показана схема гідроприводу руху візка машини «Фрегат». Вода з трубопроводу 1 через гнучкий армований гумовий шланг 5, фільтр (на рис. 10.14 не показаний) і регулювальний клапан 2 поступає у клапан-розподільник 11. При відкритому нижньому прохідному отворі клапана, коли запірний орган знаходиться у верхнім положенні, вода по трубчастому штоку 8 поршня 7 надходить у порожнину циліндра 6. Тому що поршень закріплений нерухомо на конструкції опори, а циліндр може пересуватися, то під дією сили тиску води він переміщується вверх і через важіль 10 і штангу 13, переміщує зацепи ходових коліс 14 на визначений кут. Коли циліндр досягає верхнього положення, важіль 10 переводить перемикач 9 в друге крайнє положення і утримується в цьому положенні пружиною. Коли перемикач 9 переведе запірний пристрій клапана-розподільника 11 у нижнє положення, то подача води в гідроциліндр перекривається і відкривається зливальний отвір. Під дією власної маси і поворотної пружини 12 циліндр опускається і вода, що знаходиться в ньому, йде на злив. Штанга 13 переміщується вправо і входить у зачеплення з наступним зачепом коліс. Циліндр переміщується до крайнього нижнього положення, перемикач 9 переводить запірний орган клапана розподільника у верхнє положення і цикл переміщення візка повторюється.
Щоб не допустити значного прогину трубопроводу під час руху, візки, знаходячись на різній відстані від осі обертання, повинні рухатися з різною лінійною швидкістю, але зі сталою кутовою швидкістю. Це досягається за рахунок автоматичної системи синхронізації швидкості руху візків, принцип дії якої заснований на зміні швидкості візків при вигинанні трубопроводу. Швидкість регулюється зміною подачі води в гідроциліндри привода візків.

Рис. 10.14. Схема гідроприводу пересування візка ДМ «Фрегат».
При відставанні будь-якого візка від сусіднього згинається прилегла до нього ділянка трубопроводу, що призводить натягання тяг 4. Тяги впливають на стрижень 3, який переміщує вниз запірний орган регулюючого клапана 14 і збільшує його прохідний отвір. Це призводить до зменшення часу заповнення гідроциліндра водою і збільшення кількості циклів роботи гідроприводу за одиницю часу. У результаті швидкість візка зростає і трубопровід машини вирівнюється. При випередженні візка відносно сусіднього швидкість подачі води в гідроциліндр знижується. Така система керування швидкістю руху встановлена на усіх візках, крім останнього.
Швидкість руху машини і, як наслідок, норма поливу задаються зміною прохідного отвору крана-задавача швидкості руху останнього візка. Система синхронізації автоматично змінює швидкість інших візків.
В машині передбачені гідромеханічний і електричний захисти від недопустимого вигину трубопроводу. Гідромеханічна система складається з дротової тяги, що проходить по роликах уздовж усього трубопроводу, і кульового крана, який встановлено на магістралі подачі води в гідроциліндр привода останнього візка. Дротова тяга з однієї сторони закріплена на нерухомій опорі, а з іншої – зв'язана з тягою кульового крана. При недопустимому вигинанні трубопроводу дротяна тяга натягується і закриває кульовий кран. У результаті зупиняється останній візок, а через систему автоматичної синхронізації й інші візки машини.
Електричний захист призначений для аварійної зупинки машини при недопустимому вигинанні трубопроводу, яка може виникнути при відмові системи синхронізації швидкості або гідромеханічного захисту. Вона складається з ртутних перемикачів, закріплених на спеціальному маятнику, який повертається регулюючим стрижнем 3 при недопустимому вигинанні трубопроводу. Ртутні перемикачі встановлені на усіх візках і з'єднані послідовно. При повороті маятника розмикається ртутний перемикач і подається сигнал на закриття засувки на вході в трубопровід машини. В якості привода засувки використовується поршневий гідравлічний виконавчий механізм, керований за допомогою електрогідрореле ГР. Вода в гідроциліндр подається з трубопроводу машини. Живиться обмотка електромагніта електрогідрореле від акумулятора, який розміщують біля нерухомої опори.
Недолік дощувальної машини «Фрегат» – нерівномірність зволоження зрошуваної площі. Знизити нерівномірність у напрямку руху машини досягають за рахунок системи програмного керування нормою поливу. При складанні програми норму поливу визначають з урахуванням часу доби, рельєфу поля і метеорологічних умов. Програму складають на одну добу і реалізують командоапаратом з годинним механізмом, що керує краном-задавачем швидкості, який встановлюють на останньому візку. У заводському виконанні «Фрегата» зміну положення крана-задавача роблять вручну. Для дистанційного й автоматичного регулювання поливної норми кран-задавач обладнують приводом – гідравлічним виконавчим механізмом (ГВМ) з електричним керуванням. Програмне керування трохи поліпшує рівномірність зволоження ґрунту по всій площі, але воно не враховує збурюючі фактори, що мають випадковий характер. Цього недоліку позбавлена система автоматичного коректування норми поливу в залежності від передполивної вологості ґрунту (рис. 10.15). Для цього зрошувану ділянку розбивають на n секторів, на початку кожного з яких установлюють вологоміри  . Аналогові сигнали від них надходять через перемикач положення «Фрегата» Π на сумуючий пристрій С.
. Аналогові сигнали від них надходять через перемикач положення «Фрегата» Π на сумуючий пристрій С.

Рис. 10.15. Схема системи автоматичного коректування норми поливу ДМ «Фрегат».
На початку поливу задають розрахункову норму у виді нормованого електричного сигналу. При підході «Фрегата» до початку першого сектора перемикач П підключає до сумуючого пристрою С вологомір  , встановленого на лінії радіуса сектора. Сигнал, що відповідає усередненому значенню вологості уздовж фронту поливу подається з сумуючого пристрою С на елемент порівняння заданого і дійсного значення вологості ЕП1. При нерівності цих сигналів їх різниця подається на елемент порівняння ЕП2, де здійснюється порівняння дійсного і необхідного значень положення крана-задавача. У випадку невідповідності керуючий сигнал посилюється напівпровідниковим підсилювачем П надходить на ГВМ привода крана-задавача швидкості машини КЗ. Якщо дійсне положення крана-задавача відповідатиме завданню, то різниця сигналів, що надходять на ЕП2 з ЕП1, і зворотного зв'язку положення ЗЗП, буде нижчою порогу чутливості і повертання запірного крана припиняється.
, встановленого на лінії радіуса сектора. Сигнал, що відповідає усередненому значенню вологості уздовж фронту поливу подається з сумуючого пристрою С на елемент порівняння заданого і дійсного значення вологості ЕП1. При нерівності цих сигналів їх різниця подається на елемент порівняння ЕП2, де здійснюється порівняння дійсного і необхідного значень положення крана-задавача. У випадку невідповідності керуючий сигнал посилюється напівпровідниковим підсилювачем П надходить на ГВМ привода крана-задавача швидкості машини КЗ. Якщо дійсне положення крана-задавача відповідатиме завданню, то різниця сигналів, що надходять на ЕП2 з ЕП1, і зворотного зв'язку положення ЗЗП, буде нижчою порогу чутливості і повертання запірного крана припиняється.
Після корегування система автоматично відключається перемикачем положення П. Встановлена норма поливу залишається незмінною в межах руху машини у секторі. При підході «Фрегата» до другого сектора наступне корегування швидкості руху машини (норми поливу) відбувається аналогічно.
Кількість секторів залежить від рельєфу місцевості і різнорідності водно-фізичних властивостей ґрунту.

Рис. 10.16. Регулятор тиску РТ-1.
В якості перемикачів Π використовують шляхові герконові вимикачі. Електричні елементи системи живляться від акумулятора, що входить до комплекту електрозахисту. На час роботи машини у нічний час відповідно до технологічних вимог норма поливу автоматично зменшується на 15...20% за сигналом фотодавача освітленості шляхом відповідної зміни положення крана-задавача швидкості руху.
Автоматична стабілізація тиску води. Для забезпечення роботи дощувальної машини з заданою нормою поливу тиск води на вході в трубопровід необхідно підтримувати сталим. Якщо машина працює від автономної насосної станції, то це досягається за рахунок керування її режимом. Однак дуже часто до одного напірного трубопроводу приєднують декілька дощувальних машин. У цьому випадку тиск на вході трубопроводу кожної з машин буде залежати від кількості працюючих машин, їх витрати і віддалі до помпової станції із-за гідравлічних втрат тиску в трубопроводах. Для забезпечення номінального тиску на входах дощувальних машин на вході напірного трубопроводу підтримують підвищений тиск, а на вході кожної дощувальної машини встановлюють автоматичний регулятор тиску.
На рис. 10.16 показаний регулятор тиску РТ-1. Він складається з клапана А, який є регулюючим органом і гідравлічного регулятора Б з мембранним виконавчим механізмом, що регулює тиск «після себе». При подачі води у підвідний патрубок клапана, піднімається тарілчастий запірний орган 10 і через щілину, що утворилася, вода поступає у підвідний патрубок, і далі – у трубопровід дощувальної машини. Одночасно частина води через фільтр 12, сполучну трубку 11 і ніпель 8 попадає у порожнину над мембраною 9 і через кільцеву щілину клапана 4, імпульсну трубку 6 поступає у відвідний патрубок. Коли тиск у відвідному патрубку перевищує заданий, то через імпульсну трубку 6 зворотного зв'язку він передається в порожнину під мембрану 3. Мембрана, переборюючи зусилля пружини 2, стискується, переміщується вверх і кільцева щілина в клапані 4 зменшується. В результаті збільшується тиск у робочій камері 13 виконавчого механізму і під дією сили тиску і сили стисненої пружини 7 мембрана 9 опускається, прикриваючи запірний орган 10 клапана. Це призводить до зниження тиску у відвідному патрубку. Тиск задають переміщенням клапана 4 за допомогою регулюючого гвинта 1.
При зниженні тиску нижче заданого відбувається більше відкриття клапана 4 і тиск у робочій камері 13 зменшується. В результаті запірний орган 10 переміщується вверх, більше води надходить у підвідний патрубок і тиск після регулятора збільшується.
Регулятор РТ-1 використовують і для зупинки дощувальної машини. Для цього досить закрити кран 5. При заміні крана 5 електрокерованим запірним пристроєм, зв'язаним з давачем електричного захисту машини, регулятор можна використовувати для аварійного відключення.
Подальше вдосконалювання системи керування дощувальними машинами зв'язано з переходом від посекційного корегування до автоматичного безперервного регулювання поливу в залежності від вологості ґрунту, сонячної радіації, вітру та інших випадкових факторів. Такі системи можна реалізувати на базі мікроконтролера і відповідних давачів контролю навколишнього середовища.








