 2021-09-14
2021-09-14 202
202
Принцип скалярного управления частотно-регулируемого асинхронного ЭП базируется на изменении частоты текущих значений модулей переменных АД (напряжений, магнитных потоков, потокосцеплений и токов цепей двигателя).
Управляемость АД при этом может обеспечиваться:
· частотное регулирование - совместным регулированием частоты f 1 и напряжения U1,
· частотно-токовое регулирование - частоты f 1 и тока I 1 статорной обмотки.
Скалярный принцип частотного управления является распространенным в асинхронном ЭП. Ему свойственна техническая простота измерения и регулирования переменных АД.
Вид механической характеристики определяется тем, как соотносятся между собой частота и значение напряжения питания статора двигателя. Т.о, частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. При этом частота принимается за независимое воздействие, а значение напряжения при данной частоте определяется исходя из того, как должен изменяться вид механических характеристик привода при изменении частоты, т.е., в первую очередь, из того, как должен изменяться в зависимости от частоты критический момент.
Характер согласования напряжения и частоты - называется законом частотного регулирования, определяемым требованиями, предъявляемыми к приводу конкретного объекта, для которого предназначен электропривод.
Частотное регулирование при U/f = const
При этом во всем диапазоне регулирования скорости поддерживается постоянство перегрузочной способности двигателя
где Mmax доп – момент, максимально допустимый по условиям работы двигателя; Мн – номинальный момент.
Для АД с номинальным моментом Мн это требование сводится к необходимости поддержания постоянства критического момента во всем диапазоне регулирования скорости изменением частоты.
Момент асинхронного двигателя можно выразить через электромагнитную мощность и угловую скорость вращающегося магнитного поля в физическом пространстве w0 = w0 эл / p п:
 (3.1)
(3.1)
где w0 эл.н – номинальная угловая частота напряжения статора.
Тогда формула для электромагнитного момента асинхронного двигателя приобретает вид
 (3.2)
(3.2)
Если пренебречь активным сопротивлением ротора и положить R 1 = 0, то выражение (3.2) примет вид:
 (3.3)
(3.3)
где k 1 = x m/ x 1 = L m/ L 1.
Исследование этого выражения на экстремум позволяет определить роторную критическую частоту:
Подставив это значение в выражение для момента двигателя, можно получить формулу для критического момента:
 (3.4)
(3.4)
из которой следует, что при U 1 / w0 = const, а значит и U 1/ f = const, критический момент остается постоянным независимо от частоты.
В реальном двигателе активное сопротивление обмоток статора не равно нулю. Тем не менее, допущение, что R1  0, оказывается приемлемым при рассмотрении характеристик двигателей большой мощности. Это объясняется тем, что в двигателе большой мощности проводники обмотки статора имеют большое поперечное сечение и, следовательно, омическое сопротивление обмотки действительно невелико по сравнению с ее индуктивным сопротивлением.
0, оказывается приемлемым при рассмотрении характеристик двигателей большой мощности. Это объясняется тем, что в двигателе большой мощности проводники обмотки статора имеют большое поперечное сечение и, следовательно, омическое сопротивление обмотки действительно невелико по сравнению с ее индуктивным сопротивлением.
Частотное регулирование при Ea/f = const
При рассмотрении двигателя малой или средней мощности, пренебрежение активным сопротивлением статорной обмотки может привести к тому, что требование поддержания постоянства критического момента при изменении частоты выполняться не будет. Следовательно, в общем случае, закон частотного регулирования, при котором напряжение меняется пропорционально частоте, не обеспечивает независимости критического момента от частоты.
Вид механических характеристик, рассчитанных по Т-образной схеме замещения (рис. 3.2) для двигателя короткозамкнутым ротором Рн = 1,1 кВт, представлен на рис. 3.1. Номинальные фазное напряжение и ток статора (действующие значения): U 1н=220 В; I 1н=2,73 А; номинальная частота напряжения питания f = 50 Гц (w  = 314 рад/с); число пар полюсов р п = 2 (синхронная скорость n0н=1500 об/мин; угловая синхронная скорость w0н = 157 рад/с). Заданные в каталожных данных параметры схемы замещения в относительных единицах: активные сопротивления фазы статора и ротора: R 1 = 0,118; R 2 = 0,07; индуктивное сопротивление намагничивающего контура x m = 1,74; индуктивные сопротивления рассеяния статора и ротора соответственно: x 1s = 0,144; x 2s = 0,113. Для перехода к абсолютным единицам эти значения надо умножить на базовое сопротивление Zб=U1н/I1н=220/2,73=80,59 Ом. В результате R1 =9,50 Ом; R2 =5,64 Ом; x m = 140,4 Ом; x 1s = 11,6 Ом; x 2s = 9,1 Ом; x 1 = 152 Ом; x 1 = 149,5 Ом.
= 314 рад/с); число пар полюсов р п = 2 (синхронная скорость n0н=1500 об/мин; угловая синхронная скорость w0н = 157 рад/с). Заданные в каталожных данных параметры схемы замещения в относительных единицах: активные сопротивления фазы статора и ротора: R 1 = 0,118; R 2 = 0,07; индуктивное сопротивление намагничивающего контура x m = 1,74; индуктивные сопротивления рассеяния статора и ротора соответственно: x 1s = 0,144; x 2s = 0,113. Для перехода к абсолютным единицам эти значения надо умножить на базовое сопротивление Zб=U1н/I1н=220/2,73=80,59 Ом. В результате R1 =9,50 Ом; R2 =5,64 Ом; x m = 140,4 Ом; x 1s = 11,6 Ом; x 2s = 9,1 Ом; x 1 = 152 Ом; x 1 = 149,5 Ом.
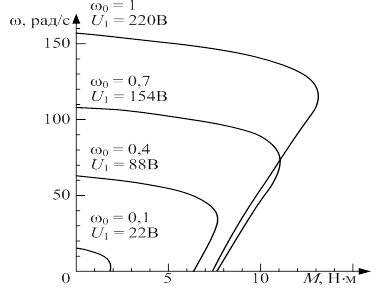
Рис. 3.1. Механические характеристики асинхронного двигателя при расчете по Т-образной схеме замещения
Из механических характеристик АД (рис. 3.1) видно, что при использовании закона регулирования U / f = const, на низких частотах резко снижается предельный момент двигателя, что может привести к заклиниванию вала двигателя при моменте, равном номинальному.
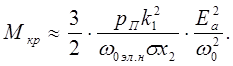
Рассмотрев Т-образную схему замещения АД (рис. 3.2), можно прийти к выводу, что при пренебрежении активным сопротивлением статорной обмотки напряжение U 1 = Ea. Из этого следует, что формулы (3.3) и (3.4) могут быть использованы при R 1 > 0, если в них заменить напряжение на статоре U1 на наряжение за активным сопротивлением Ea и записать эти формулы в виде:
 (3.5)
(3.5)
 (3.6)
(3.6)
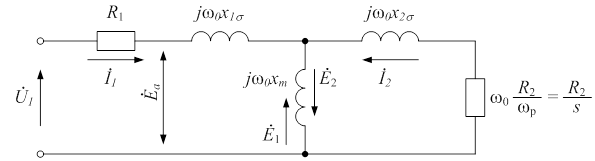
Рисунок 3.2. Т-образная схема замещения АД
Т.о, для поддержания постоянства перегрузочной способности двигателя при частотном регулировании необходимо выполнять закон частотного регулирования в виде:
Ea /w0 = const. (3.7)
Из формулы (3.6) видно, что при этом момент двигателя зависит только от значения роторной частоты и не зависит от текущего значения частоты напряжения питания. Вид механических характеристик представлен, рис. 3.3.
Рис.3.3. Механические характеристики асинхронного ЭП при Ea /w0 = const
Для обеспечения закона частотного регулирования, определяемого выражением (3.7), напряжение на статорных обмотках нужно увеличивать по сравнению с Еа на величину падения напряжения в статорной обмотке I 1 R 1 от тока статора.
Упрощенная функциональная схема рис.3.4, поясняющая принципиальную возможность реализации закона регулирования Ea / f = const по средствам IR-компенсации.
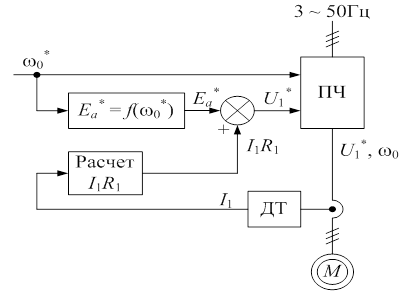
Рис.3.4. Реализация закона частотного регулирования Ea / f = const по средствам режима IR-компенсации
Сигнал задания напряжения на статоре U 1* = Ea * + I 1 R 1 формируется непосредственно как сумма заданного значения напряжения за активным сопротивлением статора и величины, пропорциональной падению напряжения на активном сопротивлении обмотки статора. Второе слагаемое в правой части этого равенства определяется по измеренному и выпрямленному току статора I 1при известном активном сопротивлении обмотки статора R 1. Наличие блока Ea* = f (w0*) предусматривает возможность задания различных зависимостей напряжения за активным сопротивлением от частоты.
Частотное регулирование при Ea/f 2 = const
При работе на вентиляторную нагрузку (центробежные насосы, компрессоры), целесообразно применять частотное регулирование по закону Ea / f 2 = const (рис. 3.5).
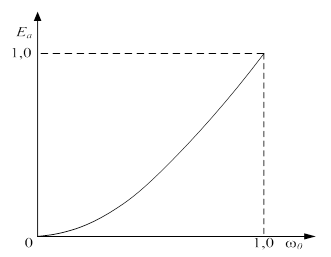
Рисунок 3.5. Закон частотного регулирования Ea / f 2 = const
Механические характеристики асинхронного двигателя при этом принимают вид представленный на рис. 3.6.
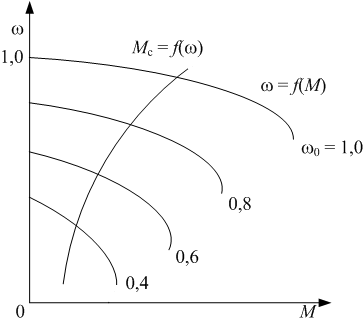
Рисунок 3.6. Механические характеристики АД при Ea / f 2 = const
Вентиляторная характеристика момента нагрузки M c = f (w), при которой момент растет с увеличением нагрузки, также представлена на рис. 3.6.








