 2014-02-17
2014-02-17 352
352РАЗВОДКА ШИН ДАННЫХ
Для этого существует два основных способа. Первый способ — это параллельное соединение обычных буферных КМОП-элементов (например, К561ЛН2). И второй, наиболее предпочтительный, способ — соединение элементов с тремя выходными состояниями.
ФИЛЬТРАЦИЯ ПОМЕХ ИСТОЧНИКА ПИТАНИЯ
Поскольку КМОП-схемы могут работать в широком диапазоне питающих напряжений (3-15 В), необходима минимальная фильтрация. Минимальное значение напряжения источника питания определяется максимальной рабочей частотой самого быстрого элемента в системе (обычно очень небольшая часть системы работает на максимальной частоте). Фильтры должны быть выбраны из расчета поддержания питающего напряжения примерно посередине между указанным минимальным значением и максимальным напряжением, при котором микросхемы еще работоспособны. Однако если требуется минимизировать рассеиваемую мощность, напряжение источника питания должно быть выбрано как можно меньшим, при одновременном удовлетворении требований быстродействия.
Существует два основных правила для согласования элементов всех других семейств с микросхемами КМОП. Во-первых, КМОП-схема должна обеспечивать необходимые требования по входным токам и напряжениям элементов других семейств. И, во-вторых, что еще важнее, амплитуда выходного сигнала логических элементов других семейств должна максимально соответствовать напряжению источника питания КМОП-схемы.
P-КАНАЛЬНЫЕ МОП-СХЕМЫ
Существует целый ряд требований, которые необходимо обеспечить при согласовании P-МОП и КМОП-схем. Во-первых, это набор источников питания с различными напряжениями. Большинство P-МОП-схем рассчитаны для работы при напряжении от 17 В до 24 В, в то время как схемы-КМОП рассчитаны на максимальное напряжение 15 В. Другой проблемой P-МОП-схем, в отличие от КМОП, является значительно меньшая амплитуда выходного сигнала, чем напряжение источника питания. Выходное напряжение P-МОП-схем изменяется в пределах практически от более положительного потенциала питающего напряжения (VSS) до нескольких вольт выше более отрицательного потенциала (VDD). Поэтому, даже в случае работы P-МОП-схемы от источника напряжением 15 В, амплитуда ее выходного сигнала все равно будет меньше необходимой, чтобы обеспечить согласование с КМОП-схемой. Существует несколько способов решения данной проблемы, в зависимости от конфигурации системы. Рассмотрим два способа построения системы полностью на МОП-схемах и один способ, когда в системе используются ТТЛШ-схемы.
В первом примере используются только P-МОП и КМОП-схемы с напряжением питания менее 15 В (см. рис. 10). В этой конфигурации КМОП-схема управляет P-МОП непосредственно. Однако P-МОП-схема не может управлять КМОП напрямую, поскольку ее выходное напряжение уровня логического нуля значительно превышает нулевой потенциал системы. Для “подтягивания” выходного потенциала схемы к нулю, вводится дополнительный резистор RPD. Его величина выбирается достаточно малой, чтобы обеспечить желаемую постоянную времени RC при переключении выхода из “единицы” в “ноль” и, в то же время, достаточно большой, чтобы обеспечить необходимую величину уровня логической “единицы”. Этот способ подходит также и для выходов P-МОП-схем с открытыми стоками.

Другим способом в полностью МОП-системе является применение источника опорного напряжения на основе обычного стабилитрона для формирования более отрицательного потенциала, питающего КМОП-схему (рис. 11).
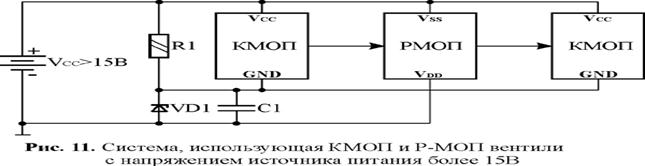
В этой конфигурации используется источник питания P-МОП-схемы напряжением 17-24 В. Опорное напряжение выбирается таким образом, чтобы уменьшить напряжение питания КМОП-схем до минимального размаха выходного напряжения P-МОП-схемы. КМОП-схема может по-прежнему управлять P-МОП непосредственно, но теперь, P-МОП-схема может управлять КМОП без “подтягивающего” резистора. Другими ограничениями являются: питающее напряжение КМОП-схем, которое должно быть меньше 15 В, и необходимость обеспечения опорным источником достаточного тока для питания всех КМОП-схем в системе. Это решение вполне пригодно, если источник питания P-МОП-схемы должен быть больше 15 В, и потребляемый ток КМОП-схемами достаточно мал, чтобы его мог обеспечить простейший параметрический стабилизатор.
Если в системе используются ТТЛШ-схемы, то должны быть, по крайней мере, два источника питания. В таком случае, КМОП-схема может работать от однополярного источника и управлять P-МОП-схемой непосредственно (рис. 12).









