 2014-02-09
2014-02-09 1079
1079Рассмотрим ротор (рисунок 4.1), размеры которого вдоль оси вращения малы по сравнению с радиальными размерами (шкивы, диски и т.д.).
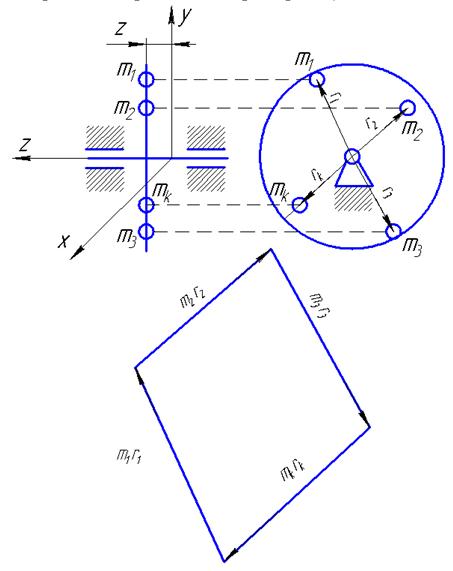
Рисунок 4.1
Для полного устранения неуравновешенности необходимо выполнение двух условий
Но так, как все избыточные массы практически находятся в одной плоскости, координат по оси Z будет величиной постоянной и её можно вынести за знак суммы
А это значит достаточно выполнить только первое условие – второе выполнится автоматически, т.е. для данного ротора нужно решить векторное уравнение

Зная дисбаланс , задаваясь одним из параметров (массой или радиусом, в зависимости от конструктивных соображений) определяем второй параметр.
, задаваясь одним из параметров (массой или радиусом, в зависимости от конструктивных соображений) определяем второй параметр.
Балансировка роторов.
Принято уравновешивание на этапе проектирования звена называть уравновешиванием, а уравновешивание после изготовления звена, называть балансировкой.
Полностью уравновешенный ротор при проектировании после его изготовления обладает, тем не менее, некоторой неуравновешенностью, вызванной неоднородностью материала и отклонениями размеров от номинальных.
При балансировке вместо корректирующих масс (противовесов) можно применить «антипротивовесы». Это означает, что в плоскостях исправления вместо добавления mk1 и mk2 с противоположной стороны удаляют такую же массу. Возможность того или иного приёма определяется конструкцией ротора.
Статическую балансировку роторов можно проводить в статическом режиме на опорах с малым коэффициентом трения. Но более точной и перспективной, с точки зрения автоматизации, проводить такую балансировку в динамическом режиме, т.е. раскручивая ротор.
Динамическую балансировку можно провести только в динамическом режиме.








