2014-02-24
2014-02-24 612
612Различают три основных типа схемного изображения устройств:
1. Структурная схема – наиболее общее обозначение составляющих частей схемы и связей между ними.
2. Функциональная схема
3. Принципиальная схема.
Функциональная схема показывает логическую последовательность и взаимосвязь элементов устройства. Степень подробности функциональной схемы может быть различной (в порядок от структурной до принципиальной).
Управляющий автомат Мили характеризуется следующими функциями:
1. Функция перехода  ;
;
2. Функция выходных сигналов  .
.
Общая структура автомата Мили следующая:
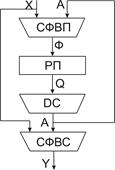
СФВС – схема формирования выходных сигналов.
Методика синтеза автомата Мили включает те же пункты, что и методика синтеза автомата Мура.
Пример:
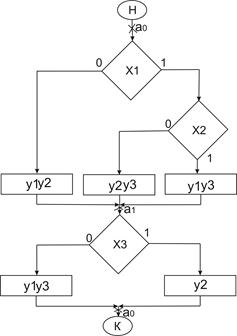
Шаг 1. Отметка состояний автомата Мили.
Состояние a0 отмечается до начала и после конца выполнения алгоритма.
Состояние ai автомата Мили отмечается вход каждой вершины, которая следует за операторной (или наоборот операторных вершин).
В общем случае число состояний автомата Мили меньше числа состояний автомата Мура. Множество состояний в данном примере: A = {a0, a1}, М = 2. Необходимая разрядность кода состояния:
R = ]log22[ = 1 à {Q1}, то есть требуется один триггер памяти.
Шаг 2. Таблица кодов состояний:
| am | Q1 |
| a0 | |
| a1 |
Шаг 3. Таблица переходов автомата Мили:
| Текущее состояние | Последующее Состояние | Х | У | Тi | ||
| Состояние | Код | Состояние | Код | |||
| a0 | a1 | 
| y1 y2 | T1 | ||
| a1 | 
| y2 y3 | T1 | |||
| a1 | x1 x2 | y1 y3 | T1 | |||
| a1 | a0 | 
| y1 y3 | T1 | ||
| A0 | x3 | y2 | T1 |
Шаг 4. ФВП:

Шаг 5. ФВС (МО).



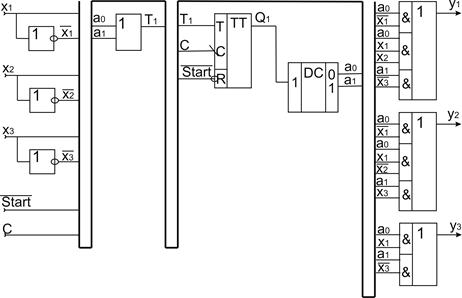
Шаг 6. Логическая схема автомата Мура: