 2014-02-09
2014-02-09 748
748Введение
Список литературы
Заключительная часть
Основная часть
Введение
Воронеж
Фондовая лекция
по физике
Тема: Элементы специальной теории относительности
Обсуждена и одобрена на заседании кафедры
протокол №_____________________________
от «__» _______________________ 2007 г.
План лекции
1. Принцип относительности. Механический принцип относительности Галилея
2. Постулаты специальной теории относительности
3. Преобразования Лоренца
4. Относительность длин и промежутков времени. Интервал между двумя событиями.
Классическая механика Ньютона прекрасно описывает движение макротел, движущихся с малыми скоростями. В конце 19 века выяснилось, что выводы классической механики противоречат некоторым опытным данным, в частности при изучении движения быстрых заряженных частиц оказалось, что их движение не подчиняется законам механики. Далее возникли затруднения при попытках применить механику Ньютона к объяснению распространения света. Физики А. Майкельсон и Е. Морли пытались обнаружить движение Земли относительно эфира. Обнаружить эфирный ветер им не удалось. Опыты показывали, что скорости света в двух движущихся друг относительно друга системах равны, что противоречило правилу сложения скоростей классической механики. Одновременно было показано противоречие между классической теорией и уравнениями Дж. К. Максвелла, лежащими в основе понимания света как электромагнитной волны.
Для объяснения этих и некоторых других опытных данных необходимо было создать новую механику, которая, объясняя эти факты, содержала бы ньютоновскую механику как предельный случай для малых скоростей. Это и удалось сделать А. Эйнштейну, который пришел к выводу о том, что мирового эфира - особой среды, которая могла бы быть принята в качестве абсолютной системы, - не существует. А. Эйнштейн заложил основы специальной теории относительности (релятивистской теории), представляющую собой современную физическую теорию пространства и времени.
1. Принцип относительности. Механический принцип относительности Галилея
1. В ньютоновской механике при переходе от одной инерциальной системы отсчета К(х, у, z, t) к другой К' (х', у', z ', t'), движущейся относительно К поступательно с постоянной скоростью V, пользуются преобразованиями координат и времени, которые называются преобразованиями Галилея. Они основаны на уже упоминавшихся нами в § 1.2 двух аксиомах об инвариантности промежутков времени и расстояний. Из первой аксиомы следует, что ход времени одинаков, но всех системах отсчета, а из второй — что размеры тела не зависят от скорости его движения.
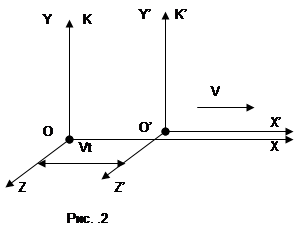
Если сходственные оси декартовых координат инерциальных систем отсчета К и К проведены попарно параллельно друг другу и если в начальный момент времени (t =t'=0) начала координат О и О' совпадают друг с другом (рис. 1), то преобразования Галилея имеют вид
х ' = x Vx t, y ' = y – Vy t, z ' = z – Vz t и t ' = t
или
r' = r – V t и t' = t (1.1)
где х, у, z и x', у ', z ' — координаты точки М в системах отсчета К (в момент времени О и К (в момент времени t) и K' (в момент времени t' = t ); r и r' -- радиусы-векторы точки M в тех же системах отсчета, а Vx V у и Vz — проекции скорости V системы К 'на оси координат системы К, Обычно оси координат проводят так, чтобы система К 'двигалась вдоль положительного направления оси ОХ (рис. 2). В этом случае преобразования Галилея имеют наиболее простой вид:
х ' = x – Vt, y ' = y, z ' = z, t ' = t (1.2)
2. Из преобразований Галилея (1.1) вытекает следующий закон преобразования скорости произвольной точки М при переходе от одной инерциальной системы отсчета К (скорость точки v=dr/dt) к другой K' ( скорость той же точки v'=dr'/dt'):
v' = v-V. (1.3)
Соответственно преобразуются и проекции скорости на сходственные оси координат:
v'x' =vx – Vx, v'y' = vy – Vy, v'z' = vz - Vz
 | |||
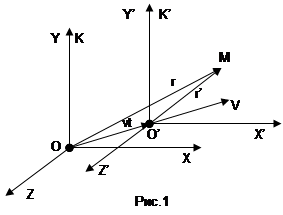 |
В частности, при движении системы К 'вдоль положительного направления оси ОХ (рис. 2)
v'x' =vx – V, v'y' = vy, v'z' = vz (1.4)
Ускорения точки М в системах отсчета AT(a = dv/dt) и K'(a' = dv'/dt') одинаковы: а' = а. Итак, ускорение материальной точки не зависит от выбора инерциальной системы отсчета оно инвариантно относительно преобразований Галилея.
3. Силы взаимодействия материальных точек зависят только от их взаимного расположения и от скоростей движения друг относительно друга. Взаимное расположение каких-либо двух точек 1 и 2 характеризуется вектором, равным разности радиусов-векторов этих точек, т. е. в системе отсчета К вектором r21 = r2 — r1. а в системе К 'вектором r'21 = r'2 — r'1. Из преобразований Галилея следует, что r'21 = r21. Поэтому расстояния между точками 7 и 2 в системах К и К' одинаковы: r'21 = r21, т. е.
(x'2 - x'1)2 + (y'2 - y'1)2 + (z'2 - z'1)2 = (x2 - x1)2 + (y2 - y1)2 + (z2 - z1)2
Скорость движения точки 2 относительно точки 1 равна разности скоростей этих точек: v 2 — v 1(в системе К) и v'2 — v'1, (в системе К'). Из преобразований Галилея следует, v '2 - v '1 = v 2 - v 1
Итак, взаимное расположение и скорость относительного движения любых двух материальных точек не зависят от выбора инерциальной системы отсчета они инвариантны относительно преобразований Галилея. Соответственно инвариантны относительно преобразований Галилея и силы, действующие на материальную точку:
F' = F.
4. Уравнения, выражающие второй и третий законы Ньютона, инвариантны относительно преобразований Галилея, т. е. не изменяют свой вид при преобразовании координат и времени от одной инерциальной системы отсчета К к другой К:
m a = F, F ki = - F ik (в системе К),
m ' a ' = F ', F 'ki = - F 'ik (в системе К'),
где m' = m — масса рассматриваемой материальной точки, одинаковая во всех системах отсчета.
Таким образом, в ньютоновской механике справедлив механический принцип относительности (принцип относительности Галилея): законы механики одинаковы во всех инерциальных системах отсчета.
Это значит, что в разных инерциальных системах отсчета все механические процессы при одних и тех же условиях протекают одинаково. Следовательно, с помощью любых механических экспериментов, проведенных в замкнутой системе тел, нельзя установить, покоится эта система или движется равномерно и прямолинейно (относительно какой-либо инерциальной системы отсчета). Механический принцип относительности свидетельствует о том, что в механике все инерциальные системы отсчета совершенно равноправны. На основе законов механики нельзя выделить из множества инерциальных систем отсчета какую-то «главную» инерциальную систему отсчета, которая обладала бы какими-либо преимуществами перед другими, так что движение тел относительно нее можно было бы рассматривать как их «абсолютное движение», а покой — как «абсолютный покой».








