 2014-02-09
2014-02-09 1855
1855Рис.1.2.1. Принцип разомкнутого управления
1.2.2.Принцип компенсации (управление по возмущению).
Если возмущающие воздействия настолько велики, что разомкнутая цепь не обеспечивает требуемой точности выполнения алгоритма функционирования, то для повышения точности иногда возможно, измерив возмущения, ввести по результатам измерения коррективы в алгоритм управления.
Сущность принципа управления по возмущению (принципа Понселе) состоит в том, что измеренное возмущение преобразуется в воздействие, подаваемое на управляющее устройства. Управляющее воздействие (X) формируется теперь с учетом возмущающего воздействия и подается на вход объекта управления с целью компенсации (предотвращения) влияния данного возмущения на регулируемую величину рис.1.2.2.
 |
Z
X Y
X0
Рис.1.2.2. Принцип управления по возмущению
1.2.3.Принцип обратной связи. Управление по отклонению.
Характеризуется тем, что управляющее воздействие формируется с учетом действительного хода процесса при помощи устройств обратной связи. Информация о состоянии координат объекта (Y) по каналам обратной связи поступает на вход управляющего устройства (УУ) где сравнивается с заданием (X0). В результате вырабатывается сигнал (X) зависящий от отклонения выходной координаты (Y), рис.1.2.3.
Данный принцип позволяет осуществить заданный закон управления независимо от возникающих возмущающих факторов (Z).
 |
Z
X0 X Y
Рис.1.2.3. Принцип управления по отклонению.
Универсальность принципа обратной связи подчеркивается и тем, что он позволяет управлять объектами с разными динамическими свойствами, в частности неустойчивыми.
1.2.4.При регулировании по отклонению влияние возмущающих воздействий (Z) на точность работы системы благодаря наличию обратной связи по регулируемой величине в значительной мере ослабляется, но не устраняется.
Улучшение качества работы системы управления при возмущающих воздействиях может быть достигнуто применением комбинированного управления (рис.1.2.4.). В таких системах на вход управляющего устройства, помимо задающего сигнала (X0) и сигнала обратной связи (Y), поступает сигнал, получаемый путем измерения возмущающих воздействий (Z). Обычно в комбинированных системах измеряется лишь основное возмущение (Zі). Влияние остальных возмущений учитывается по цепи обратной связи. Комбинированное управление сочетает принципы управления по отклонению и по возмущению.
 Z
Z
X0 X Y

Рис.1.2.4. Комбинированное управление.
1.3.Управляющее устройство совместно с регулирующими обратными связями образуют регулятор. Совокупность объекта управления и регулятора представляет систему автоматического регулирования (САР).
Обратные связи САР способствуют формированию статических и динамических характеристик системы. Эти характеристики определяются назначением САР и требованиями, предъявляемыми к ней со стороны технологического процесса. Система автоматического регулирования должна иметь хотя бы одну обратную связь, служащую для сравнения действительного и заданного значений регулируемой координаты. Такая обратная связь называется главной. Она соединяет выход системы с ее входом, охватывая все основные элементы. Системы, имеющие одну главную обратную связь, называют одноконтурными. Некоторые САР, помимо главных обратных связей, число которых определяется числом регулируемых величин, имеют еще несколько дополнительных (местных). Последние соединяют выход и вход одного или нескольких элементов системы. САР, имеющие, кроме главной, еще одну или несколько дополнительных обратных связей, называются многоконтурными.
В зависимости от характера передаваемого воздействия обратные связи делятся на жесткие и гибкие.
Жесткие обратные связи действуют как в установившемся, так и в переходном режимах системы. Средствами осуществления жестких обратных связей являются различные измерительные устройства (датчики), передающие сигналы на узел сравнения. В некоторых случаях для усиления передаваемого сигнала между датчиком и узлом сравнения устанавливается усилитель.
Гибкие обратные связи действуют только в период переходного процесса. В установившемся режиме их действие прекращается. Они передают воздействия, являющиеся производными или интегралами величин, меняющихся во времени, с целью корректирования переходного процесса в нужном направлении. Для осуществления гибких обратных связей используются устройства дифференцирования и интегрирования в сочетании с усилителями или без них.
По оказываемому на систему действию обратные связи делятся на положительные и отрицательные. Обратная связь называется положительной, если с увеличением сигнала на выходе управляющий сигнал на входе увеличивается, и отрицательной, если он при этом уменьшается. Главная обратная связь преимущественно выполняется отрицательной.
Замкнутые САУ делятся так же на системы с одной регулируемой координатой и несколькими регулируемыми координатами. Системы, в которых регулируются несколько координат, связанных друг с другом через объект, регулятор или нагрузку, называют многомерными или многосвязными.
Многосвязная система с несколькимирегулируемыми координатами характеризуется тем, что изменение какой-либо одной из них влечет за собой изменение других, данные системы отличаются наличием связей между регулируемыми координатами, обусловленными физическими свойствами управляемого объекта. Так, например, увеличение скорости синхронного генератора приводит одновременно к увеличению напряжения и частоты переменного тока. Примером многосвязной системы может, также, служить система управления листовым прокатным станом, в котором регулируется толщина проката на выходе и натяжение полосы.
1.4.Основные виды автоматического управления.
На первом этапе развития техники управления использовался практически лишь один вид автоматического управления – поддержание заданного постоянного значения регулируемой величины. Долгое время под системами автоматического регулирования понимался именно этот вид. Впоследствии число видов увеличилось, и вполне вероятно, что упоминаемые ниже шесть основных видов не исчерпывают не только возможные виды в будущем, но и существующие сегодня.
1.4.1.Стабилизация. Системы поддержания постоянства управляемой величины называют системами стабилизации. Желаемый закон в них имеет вид  . Примером может служить система автоматического поддержания скорости двигателя. Системы автоматической стабилизации широко применяются в производственных установках для поддержания постоянства различных величин: напряжения, тока, мощности, скорости, ускорения, давления, температуры, заданного курса, различного рода соотношений и пропорций.
. Примером может служить система автоматического поддержания скорости двигателя. Системы автоматической стабилизации широко применяются в производственных установках для поддержания постоянства различных величин: напряжения, тока, мощности, скорости, ускорения, давления, температуры, заданного курса, различного рода соотношений и пропорций.
1.4.2.Программное управление. При программном управлении алгоритм функционирования задан и можно построить специальное устройство – контроллер, вырабатывающее  . Программное управление можно осуществить по любому из фундаментальных принципов или с помощью их комбинации.
. Программное управление можно осуществить по любому из фундаментальных принципов или с помощью их комбинации.
В практике используют два вида систем программного управления: системы с временной программой и системы с пространственной программой.
1.4.3.Следящие системы. В следящих системах алгоритм функционирования заранее не известен. Обычно регулируемая величина в таких системах должна воспроизводить изменение некоторого внешнего фактора, следить за ним.
Следящая система может быть выполнена в соответствии с любым фундаментальным принципом управления и будет отличаться от соответствующей системы программного управления тем, что вместо датчика программы (контроллера), в ней будет помещено устройство слежения за изменениями внешнего фактора.
1.4.4.Системы с поиском экстремума показателя качества. В ряде процессов показатель качества или эффективности процесса может быть выражен в каждый момент времени функцией текущих координат системы, и управление можно считать оптимальным, если оно обеспечивает поддержание этого показателя в точке максимума, например настройку радиоприемника на частоту передающей станции по наибольшей громкости или чистоте звучания. Такое управление обладает одной нежелательной особенностью: когда точка настройки под воздействием различных возмущений окажется смещенной от экстремума, неизвестно, в каком направлении следует воздействовать на регулирующий орган, чтобы вернуть ее к экстремуму. Поэтому экстремальное управление начинают с поиска: сначала выполняют небольшие пробные “движения” в каком-то выбранном направлении, затем анализируют реакцию системы на эти пробы и после этого по результатам анализа вырабатывают управляющее воздействие в виде импульса, приближающего систему к экстремуму.
Первые упоминания в литературе об экстремальных регуляторах содержатся, по-видимому, в статье М. Леблана (1922), где описан регулятор для колебательного контура электропоезда, и в 1926г. в книге Т. Штейна, где высказывалась идея регулирования топки парового котла по минимуму потерь в дымовой трубе.
Если в рабочей области системы существуют несколько локальных экстремумов, то упомянутые методы позволяют обнаружить лишь один из локальных экстремумов, именно тот, в окрестности которого оказалась исходная точка поиска. Для нахождения глобального экстремума, если априорной информации об его окрестности нет, приходится просматривать всю рабочую область, выявляя все локальные экстремумы и сравнивая их между собой. Поскольку в системах экстремального управления измеряется значение управляемой величины, они относятся к классу систем управления по замкнутому контуру.
1.4.5.Оптимальное управление. Оптимальное управление в последние годы начали применять как в технических системах для повышения эффективности производственных процессов, так и в системах организационного управления для совершенствования деятельности предприятия, организаций, отраслей хозяйства.
В организационных системах обычно интересуются конечным, установившемся результатом команды, не исследуя эффективности во время переходного процесса между отдачей команды и получением окончательного результата.
В управлении динамическими техническими системами оптимизация часто существенна именно для переходных процессов, в которых показатель эффективности зависит не только от текущих значений координат (как в экстремальном управлении), но и от характера изменения в прошлом, настоящем и будущем, и выражается некоторым функционалом от координат, их производных и, может быть времени.
В качестве примера можно привести управление энергозатратами во время бега спортсмена на дистанции. Так как его запас энергии ограничен физиологическими факторами, а расходование запаса зависит от характера бега, спортсмен уже не может в каждый момент отдавать максимум возможной мощности, чтобы не израсходовать запас энергии преждевременно и не выдохнуться на дистанции, а должен искать оптимальный для своих особенностей режим бега.
1.4.6.Адаптивные системы. В реальных условиях внешние возмущения иногда приводят к изменению не только координат, но и параметров системы (коэффициентов уравнений). Изменения параметров, вышедшие за определенные границы, приводят не только к количественным ошибкам или ухудшению других показателей качества системы, но зачастую и к полной потере ее работоспособности. Эти потери качества часто невозможно устранить, находясь в рамках первоначально принятого принципа управления, это можно сделать лишь путем изменения параметров (а иногда и структуры) системы так, чтобы приблизить математическое описание претерпевшей изменения системы к ее исходной модели.
Системы, автоматически изменяющие значение своих параметров или структур при непредвиденных изменениях внешних условий на основании анализа состояния или поведения системы так, чтобы сохранялось заданное качество ее работы, называют адаптивными системами (от лат.adaptio- приспособление). Термин заимствован из биологии, где адаптацией называют приспособление организма к изменяющейся среде с целью сохранения жизнедеятельности.
Адаптивные системы с изменением значений параметров иногда называют самонастраивающимися, а системы с изменением структуры и алгоритма управления - самоорганизующимися.
2. Классификация систем автоматического управления.
Основными классификационными признаками систем автоматического управления являются: цель управления; характер информации об управляемом процессе или системе; способ управления; принцип формирования сигналов; характер зависимости выходных координат от входных. На рис.2 приведена классификационная схема САУ по указанным признакам.
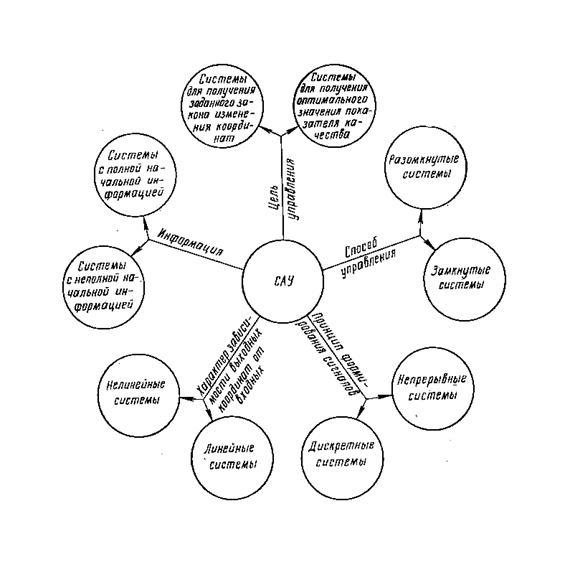
Рис.2 Классификационная схема САУ.
3.Законы регулирования.
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления, путем выработки управляющего воздействия.
Основным требованием, предъявляемым к автоматическим регуляторам, является обеспечение определенного качества регулирования, которое в первую очередь определяется законом регулирования.
Законом или алгоритмом регулирования называют математическую зависимость между выходной величиной регулятора (т.е. регулирующим воздействием) Y, и его входной величиной (т.е. отключением регулируемого параметра от заданного значения) X: Y(t)=f[X(t)].
Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном или цифровом виде.
3.1. Позиционный закон регулирования.
Позиционный закон регулирования реализуется позиционными регуляторами. Для позиционных регуляторов нет непрерывной функциональной зависимости между входной и выходной величинами. Для них закон регулирования описывается нелинейной характеристикой, подобной статической характеристике релейного элемента.
Промышленные позиционные регуляторы чаще всего выполняют на основе измерительных приборов, снабженных контактными устройствами. Поскольку статическая характеристика контактного устройства совпадает с характеристикой электромагнитных реле, то такие регуляторы также называют релейными.
Различают три основных типа позиционных регуляторов: двухпозиционные, у которых статическая характеристика соответствует двухпозиционному реле (рис.3.1,а и б), трехпозиционные (рис.3.1,в) и позиционные регуляторы с постоянной скоростью, которые имеют характеристику приведенную на (рис.3.1,г).
Двухпозиционный закон регулирования выражается уравнением:
 (3.1)
(3.1)
где B– регулирующее воздействие на объект; sign-знак сигнала.
У двухпозиционных регуляторов регулирующее воздействие может иметь лишь два дискретных значения  В, поэтому процесс регулирования имеет автоколебательный характер вокруг заданного значения X0. Когда регулируемая величина X меньше заданной X0 с учетом зоны нечувствительности b, регулирующее воздействие обеспечивает максимальный приток энергии в объекте, и значение регулируемой величины при этом будет повышаться. После превышения X заданного значения X0 на величину b, регулирующее воздействие со
В, поэтому процесс регулирования имеет автоколебательный характер вокруг заданного значения X0. Когда регулируемая величина X меньше заданной X0 с учетом зоны нечувствительности b, регулирующее воздействие обеспечивает максимальный приток энергии в объекте, и значение регулируемой величины при этом будет повышаться. После превышения X заданного значения X0 на величину b, регулирующее воздействие со
соответствует минимальному притоку энергии в объект. При этом значение регулируемой величины начнет уменьшаться до тех пор, пока не станет мень-
 Xвых
Xвых
|
B Xвх
|
 а) б)
а) б)
в)
 |
г)
Рис.3.1. Релейные характеристики
ше заданного X0 на величину b. Далее процесс повторяется с постоянной амплитудой и периодом колебаний.
Преимущество позиционных регуляторов – простота и очень быстрое восстановление заданного значения параметра до установившихся колебаний. Наличие колебаний значительный недостаток регулирования. Поэтому такой способ управления применяют для технологических процессов, допускающих значительные колебания регулируемого параметра.
3.2.Пропорциональный закон регулирования (П-закон)
Регулятор, осуществляющий этот закон, называют пропорциональным, или статическим. У П-регулятора существует линейная зависимость между регулирующим воздействием и регулируемым параметром:
 (3.2)
(3.2)
где kp – коэффициент передачи регулятора.
Это значит, что при отклонении регулируемой величины от заданного значения регулятор одновременно и с пропорциональной скоростью воздействует на объект регулирования, стремясь вернуть ее к заданному значению.
Процесс регулирования П-регулятором характеризуется наличием статической ошибки (т.е. разницы между заданным и установившимся значением регулируемой величины).
Пропорциональный регулятор позволяет устойчиво регулировать работу почти всех промышленных объектов, но в системе регулирования всегда будет наблюдаться статическая ошибка, пропорциональная амплитуде возникшего возмущения.
Достоинством данного типа регулятора является высокое быстродействие.
3.3.Интегральный закон регулирования (И-закон).
Закон осуществляется интегральным (или астатическим) регулятором и характеризуется зависимостью:
 (3.3)
(3.3)
где Tи – постоянная времени интегрирования.
Уравнение (3.3) показывает, что скорость изменения регулирующего воздействия пропорциональна величине отклонения регулируемого параметра.
Регулирование И- регулятором связано с большими колебаниями, процесс регулирования протекает медленно, динамическая ошибка велика. В следствии этого интегральный регулятор может быть использован только при регулировании процессов в малоинерционных объектах. Основным достоинством И-регулятора является отсутствие статической ошибки регулирования.
3.4.Пропорционально-интегральный закон регулирования (ПИ- закон).
ПИ – закон реализуется пропорционально- интегральным регулятором и выражается следующим уравнением:
 (3.4)
(3.4)
Регулятор ПИ обеспечивает астатическое регулирование, сочетает достоинства пропорционального и интегрального регуляторов.
Оптимальный процесс регулирования обеспечивается правильно выбранными значениями коэффициентов kp и Tи. ПИ-регулятор наиболее распространен, применяется практически во всех САУ.
3.5.Пропорционально-дифференциальный закон регулирования (ПД-закон).
Мощным средством улучшения качества работы САР в переходном режиме является введение в закон регулирования производной от ошибки. В этом случае закон регулирования называется пропорционально-дифференциальным, реализуется ПД-регулятором и выражается следующим уравнением:


 (3.5)
(3.5)
где Тд –постоянная времени дифференцирования.
3.6. Пропорционально-интегрально-дифференциальный закон регулирования (ПИД-закон).
Закон регулирования реализуется ПИД- регулятором и выражается следующим уравнением:
 (3.6)
(3.6)
Усложнение закона регулирования позволяет повысить качество управления. ПИД-регулятор реагирует не только на то, какое значение имеет отклонение регулируемой величины в данный момент, но и на то, с какой быстротой оно будет возрастать или убывать. Регулятор работает как бы с опережением (предварением).
Наилучший эффект дает применение ПИД- регулятора в САУ с медленно изменяющимся регулируемым параметром.
4.1. Математическое представление сигналов.
4.1.1.Классификация сигналов.
Сигналы являются материальными носителями информации, обуславливающей функционирование систем автоматического управления. Они делятся на регулярные (детерминированные) и случайные.
Регулярным называется сигнал, математическим представлением которого является заранее заданная функция времени. К основным типам регулярных сигналов относятся периодические, почти- периодические и непериодические сигналы.
Периодические сигналы представляются функцией времени, удовлетворяющей условию  , где Т –некоторая постоянная, называемая периодом.
, где Т –некоторая постоянная, называемая периодом.
Почти- периодические сигналы являются функцией времени, представляемой суммой гармонических составляющих с произвольными частотами. Почти - периодические сигналы могут получиться в результате, например, сложения двух синусоид с некратными частотами.
Непериодическими называют регулярные сигналы, заданные функцией времени в пределах конечного ( ) или полубесконечного (
) или полубесконечного ( ) интервала времени, вне которого она тождественно равна нулю.
) интервала времени, вне которого она тождественно равна нулю.
Случайный – это сигнал, который не может быть описан заранее заданной функции времени. Для математического представления случайных сигналов используются методы теории вероятности и статической динамики.
В технике управления применяются как непрерывные, так и дискретные сигналы. Непрерывный сигнал представляет непрерывную функцию времени. В некоторых случаях эта функция может иметь разрывы первого или второго рода, приобретая при этом конечные или бесконечные значения.
Дискретные сигналы могут быть дискретными по уровню, по времени или и по уровню, и по времени. Дискретные сигналы используются в микропроцессорных системах управления.
4.1.2.Виды задающих и возмущающих воздействий.
Внешние воздействия (возмущения) влияющие на работу САР, представляет собой непрерывные функции времени с различными законами изменения. Часто такой же характер имеют и задающие воздействия.
Заранее неизвестные законы изменения внешних воздействий затрудняют анализ статики и динамики САР. Поэтому для анализа работы систем автоматического управления часто используют так называемые типовые, управляющие и возмущающие воздействия, которые представляют собой либо наиболее вероятные, либо наиболее неблагоприятные законы изменения этих воздействий.
Широко в качестве типовых используются воздействия полиномиального вида:
 (4.1)
(4.1)
где n=0,1,2,…- целые положительные числа; f(n)- постоянные величины;
1(t) –единичная ступенчатая функция:
 при
при 
При n=0 выражение (4.1) определяет ступенчатое воздействие:
 (4.2)
(4.2)
При n=1 из выражения (4.1.) получим линейное воздействие (воздействие с постоянной скоростью):
 (4.3)
(4.3)
При n=2 из выражения (4.1) получим воздействие с постоянным ускорением:
 (4.4)
(4.4)
Графическое представление типовых воздействий соответствующих уравнениям (4.2, 4.3, 4.4) представлено на рис.4.1:
 f(t)
f(t)
a)
f(o) 
t
 f(t)
f(t)

б)


t
 f(t)
f(t)
в)
t
Рис. 4.1. Типовые полиномиальные воздействия.
В некоторых случаях в качестве типового используется воздействие следующего вида:
 (4.5)
(4.5)
где  - дельта функция.
- дельта функция.
 при
при
Дельта-функция (импульсный сигнал) представляет собой математическую идеализацию импульса бесконечно малой длительности, бесконечно большой амплитуды, имеющего конечную площадь, равную единице, т.е.
 .
.
Существует математическая зависимость между единичной ступенчатой функцией 1(t) и дельта-функцией.
 (4.6)
(4.6)
При исследовании частотных свойств элементов и систем автоматического управления широко используется гармонический (синусоидальный) сигнал. Он представляет функцию времени следующего вида:
 (4.7)
(4.7)
где k-постоянный коэффициент;  - частота;
- частота;  - фаза.
- фаза.
Следует отметить, что любое внешнее воздействие сложной формы может быть приближенно представлено в виде совокупности типовых воздействий, связанных между собой математическими зависимостями.
4.2. Статические и динамические характеристики САУ. Линеаризация.
На определенном этапе разработки и исследования автоматической системы управления получают ее математическое описание – описание процессов, проистекающих в системе, на языке математики. Математическое описание может быть аналитическим (с помощью уравнений), графическим (с помощью графиков, структурных схем, и графов) и табличным (с помощью таблиц).
Для получения математического описания системы обычно составляют описание ее отдельных элементов. В частности, для получения уравнений системы составляют уравнение для каждого входящего в нее элемента. Совокупность всех уравнений элементов и дает уравнение системы.
Уравнения (а также структурные схемы) САУ называют ее математической моделью.
Оценка качества функционирования систем автоматического управления базируется на исследовании их статических и динамических характеристик.
Статическими называются характеристики, отображающие связь между входными воздействиями и выходными координатами в установившемся режиме.
Динамическими называют характеристики, отображающие переходной процесс в системе при различных формах воздействий.
Линеаризация. Обычно автоматические системы описываются нелинейными дифференциальными уравнениями. Но во многих случаях возможна их линеаризация, т.е. замена исходных нелинейных уравнений линейными, приближенно описывающими процессы в системе. Процесс преобразования нелинейных уравнений в линейные называют линеаризацией.
Звенья и системы, которые описываются линейными уравнениями, называют соответственно линейными звеньями и линейными системами.
В зависимости от того, входит или нет время явно в уравнение, системы разделяют на стационарные и нестационарные. САУ называют стационарными, если они при постоянных внешних воздействиях описываются уравнениями, не зависящими от времени. Это значит, что свойства системы со временем не изменяются. В противном случае система называется нестационарной.
4.3. Основные свойства преобразования Лапласа.
Здесь даны основные сведения о преобразовании Лапласа, которые будут использованы при рассмотрении систем, описываемых линейными дифференциальными уравнениями.
Преобразованием Лапласа называют соотношение:
 (4.8)
(4.8)
соотношение (4.8) ставит функции x(t) вещественного переменного в соответствие функцию x(s) комплексного переменного  .
.
При этом x(t) называется оригиналом, а x(s)- изображением или изображением по Лапласу. То, что x(t) имеет своим изображением x(s) или оригиналом x(s) является x(t), записывается (символическая форма):
 (4.9)
(4.9)
где L- оператор Лапласа.
Соотношение
 (4.10)
(4.10)
определяющее по известному изображению его оригинал, называют обратным преобразованием Лапласа. В неминтеграл берется вдоль любой прямой  , с -число положительное.
, с -число положительное.
Символически обратное преобразование Лапласа записывается следующим образом:
 (4.11)
(4.11)
где символ L-1-обратный оператор Лапласа.
Основные свойства преобразования Лапласа
1) Свойство линейности. Для любых постоянных  и
и  :
:
 (4.12)
(4.12)
2) Дифференцирование оригинала. Если производная  является функцией – оригиналом, т.е. обладает указанными выше свойствами, то
является функцией – оригиналом, т.е. обладает указанными выше свойствами, то  , где
, где 
 . Если n-я производная является функцией - оригиналом, то:
. Если n-я производная является функцией - оригиналом, то:
 , (4.13)
, (4.13)
где  к=0,1,…,n-1.
к=0,1,…,n-1.
Если начальные условия нулевые, т.е.  , то последняя формула принимает вид:
, то последняя формула принимает вид:
 (4.14)
(4.14)
Таким образом, при нулевых начальных условиях дифференцированию оригинала соответствует умножение изображения на s.
3) Интегрирование интеграла. Интегрирование оригинала сводиться к делению изображения на s:
 (4.15)
(4.15)
4) Теорема запаздывания. Для любого положительного числа t:
 (4.16)
(4.16)
5) Теорема о свертке (теорема умножения изображений). Если х1(t) и х2(t) – оригиналы, а х1(s) и х2(s) – их изображения, то:
 (4.17)
(4.17)
Интеграл правой части равенства называют сверткой функции.
6) Теорема о предельных значениях. Если х(t) -оригинал, а х(s) его изображение, то  и при существовании предела
и при существовании предела  :
:
 (4.18)
(4.18)
7) Теорема разложения. Если функция  дробно - рациональна, причем степень полинома числителя меньше степени полинома знаменателя, то ее оригиналом является умноженная на 1(t) функция:
дробно - рациональна, причем степень полинома числителя меньше степени полинома знаменателя, то ее оригиналом является умноженная на 1(t) функция:
 (4.19)
(4.19)
где sk – корни уравнения B(s)=0, а nk - их кратности и l - число различных корней. Если все корни уравнения простые, то эта формула разложения принимает вид:
 (4.20)
(4.20)
где n – степень полинома B(s), 
Пример. Пусть изображение

Согласно принятому обозначению,
 ;
;  ;
; 
Функция x(s) имеет полюсы (корни уравнения B(s)=0) S1=0, S2= -2. Полюс S1 является простым, а полюс S2 - кратным, имея кратность n2=2. Простому полюсу S1 соответствует слагаемое
 .
.
Кратному полюсу S2 – слагаемое

Поэтому 
5.Математическое описание САУ. Передаточные функции.
5.1.Форма записи линейных дифференциальных уравнений.
При описании автоматических систем управления широко используют символическую форму записи линейных дифференциальных уравнений.
 (5.1)
(5.1)
Введем для операции дифференцирования обозначение р, т.е.
 ;
; 
Используя его, уравнение (5.1.) можно записать в виде:
 (5.2)
(5.2)
При записи и преобразовании дифференциальных уравнений оператор
(операцию дифференцирования) р можно рассматривать как алгебраический сомножитель, а выражение ру - как произведение, не обладающее свойством коммутативности: нельзя вместо ру писать ур. Учитывая это замечание, перепишем (5.2), вынеся у и х за скобки:
 (5.3)
(5.3)
Введем обозначение  ,
,  ,
, 
С помощью этих обозначений уравнение (5.3) можно записать в более компактной форме:
 (5.4)
(5.4)
В уравнении (5.4) Q(р) (дифференциальный оператор при выходной величине) называют собственным оператором, а R1(p) и R2(p) (дифференциальные операторы при входных величинах) – операторами воздействия. R1(p) – оператор управляющего воздействия. R2(p) – оператор возмущающего воздействия.
5.2 Стандартная форма записи линейных дифференциальных уравнений.
Обычно линейные дифференциальные уравнения с постоянными коэффициентами не выше второго порядка записывают в стандартной форме. При этом члены, содержащие выходную величину и ее производные, записывают в левой части уравнения, а все остальные члены – в правой; коэффициент при выходной величине делают равным единице. Если в правой части содержаться производные, то члены, содержащие какую-либо одну входную величину и ее производные, объединяют в одну группу и коэффициент при соответствующей входной величине выносят за скобки.
Уравнение (5.1) в стандартной форме принимает вид:
 (5.5)
(5.5)
где  ;
;  ;
;  ;
;  ;
;  .
.
В уравнении (5.5) постоянные Т0 , Т1, Т2 имеют размерность времени и их называют постоянными времени, а коэффициенты к1 и к2 – передаточными коэффициентами. Если исходное уравнение (5.1) не содержит у (а2=0), то в стандартной форме коэффициент при производной у должен быть равен единице: обе части уравнения делят на коэффициент а1.
В символической форме уравнение (5.5) принимает вид:
 (5.5)
(5.5)
5.3 Передаточные функции.
Передаточные функции наряду с дифференциальными уравнениями широко используют для описания систем автоматического управления.
Отношение оператора воздействия к собственному оператору называют передаточной функцией в операторной форме.
Звено (система), описываемое уравнением (5.1) или, что то же самое, уравнениями (5.2) – (5.4) можно характеризовать двумя передаточными функциями: передаточной функцией W1(р) по входной величине х (управляющее воздействие), т.е.
 (5.6)
(5.6)
и передаточной функцией W2(p) по входной величине z (возмущающее воздействие), т.е.
 (5.7)
(5.7)
Используя передаточные функции, уравнение (5.1) записывают в виде:
 (5.8)
(5.8)
Это уравнение представляет собой, условную, более компактную форму записи исходного уравнения (5.1). Уравнения (5.3), (5.4) и (5.8) называют уравнениями в символической или операторной форме записи.
Наряду с передаточной функцией в операторной форме широко используют передаточную функцию в форме изображений Лапласа.
Передаточной функцией в форме изображений Лапласа называют отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях, т.е.
 (5.9)
(5.9)
Передаточную функцию в форме изображения Лапласа можно получить из передаточной функции в операторной форме, если в последней сделать подстановку р = s. В общем случае это следует из того, что дифференцированию оригинала - символическому умножению оригинала на р – при нулевых начальных условиях соответствует комплексное число s.
Сходство между передаточными функциями в форме изображений Лапласа и в операторной форме чисто внешнее. Оно имеет место только в случае стационарных систем. Если звено (система) является нестационарным, т.е. коэффициенты в (5.1) зависят от времени, выражениями (5.10) пользоваться нельзя.
 ;
;
 (5.10)
(5.10)
Используя передаточные функции (5.10), уравнение (5.1) в изображениях Лапласа можно записать
 (5.11)
(5.11)
Это уравнение адекватно исходному дифференциальному уравнению (5.1) только при нулевых начальных условиях.
Рассмотрим для примера системы, которые описываются уравнениями  ;
;  . Им соответствует передаточная функция
. Им соответствует передаточная функция  . Их решениями при g=t является соответственно
. Их решениями при g=t является соответственно  ;
;  . Эти решения совпадают только при нулевых начальных условиях. При других начальных условиях они не совпадают и передаточная функция не может служить описанием системы, определяемой первым из приведенных дифференциальных уравнений.
. Эти решения совпадают только при нулевых начальных условиях. При других начальных условиях они не совпадают и передаточная функция не может служить описанием системы, определяемой первым из приведенных дифференциальных уравнений.
В том случае, если приведена структурная схема САР, можно определить передаточную функцию относительно двух любых точек структуры. Для этого необходимо использовать существующие правила структурных преобразований.

