 2014-02-09
2014-02-09 2521
2521Тема 10. (10 ч., СРС 4 ч.)
Заход на посадку и посадка являются самым ответственным этапом полета. При посадке в условиях реально дейсвующих возмущений самолет должен попасть на ограниченный участок поверхности ВПП. Скорости и ускорения в момент приземления должны быть ограничены по соображениям прочности шасси самолета.
Процесс посадки можно разбить на следующие основные фазы:
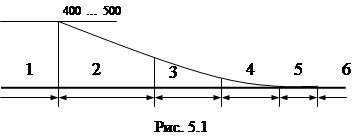 |
1 – выход на продольную ось ВПП (H=const);
2 – снижение по глиссаде (q = const) с постоянной скоростью;
3 – выравнивание (уменьшение вертикальной и горизонтальной составляющих скорости до посадочных значений);
4 – парирование угла сноса непосредственно перед приземлением yВ;
5 – послепосадочный пробег;
6 – руление.
Первые две фазы составляют этап захода на посадку, три последующие – этап посадки. Традиционным методом автоматического управления посадкой является стабилизация некоторой жестко заданной линии снижения (глиссады). Глиссада задается с помощью наземных курсового и глиссадного маяков, формирующих равносигнальные зоны соответственно в горизонтальной и вертикальной плоскостях. Пересечение этих зон и определяет заданную линию снижения в направлении оси ВПП с постоянным наклоном к горизонту порядка 2,5...3°. Отклонения от равносигнальной линии определяются посредством бортовых приемников. С помощью маркерных маяков, излучение которых направлено вверх, фиксируются моменты прохода определенных точек. В эти моменты контролируется высота полета. Траектории захода на посадку имеют вид:
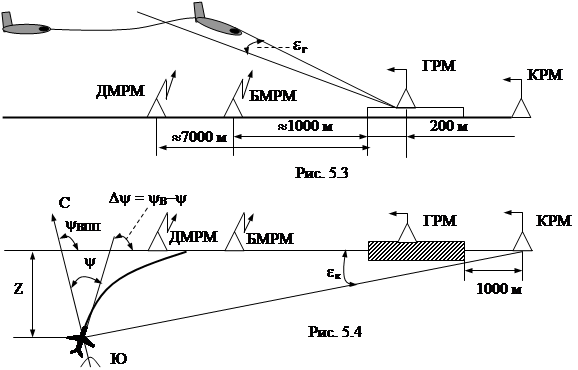 |
Где: ГРМ – глиссадный радиомаяк;
КРМ – курсовой радиомаяк;
БМРМ – ближний маркерный маяк;
ДМРМ – дальний маркерный маяк;
ВПП – взлетно-посадочная полоса.
В горизонтальной плоскости при выходе самолета на курсовую линию им управляют таким образом, чтобы при ограниченном крене совместить вектор путевой скорости с курсовой линией до пересечения глиссады. В вертикальной плоскости выход на глиссаду характеризуется поворотом вектора скорости на угол 2…4°, который должен быть достаточно быстрым, но ограничиваться допустимой перегрузкой. На участке выхода на глиссаду самолет поворачивается так, чтобы совместить при ограниченной перегрузке вектор скорости с глиссадой. В режиме следования по глиссаде вектор скорости должен совпадать с глиссадой. Сигналы курсового маяка могут использоваться для управления боковым движением вплоть до приземления, в отличие от глиссадного маяка, управление по сигналам которого происходит до начала выравнивания.
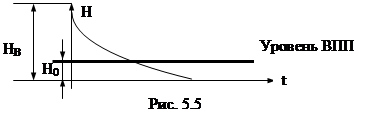
Глиссадный радиомаяк дает возможность измерить в вертикальной плоскости угол er между линией маяк-самолет и заданной глиссадой, а курсовой радиомаяк соответсвенно в горизонтальной плоскости угол eк см. рис. 5.4. Система управления строится по принципу обнуления этих углов.
Следующий этап – выравнивание начинается на высоте 15…20м и кончается в момент касания колесами ВПП. Этот этап характеризуется переходом от прямолинейной траектории движения к криволинейной. Участок выравнивания начинается над входной кромкой ВПП, при этом траектория снижения задается бортовым программным устройством в виде программ  ,
,  и представляет собой экспоненту
и представляет собой экспоненту
 (5.1)
(5.1)
где h0,hk,æ – параметры.
Для того, чтобы обеспечить заданную вертикальную скорость касания ВПП асимптоту экспоненты выравнивания проводят ниже уровня ВПП на величину H0:
 |
Система управления строится по принципу минимизации отклонений по высоте и их скорости изменения от програмной траектории. В качестве источника информации используется радиовысотомер.
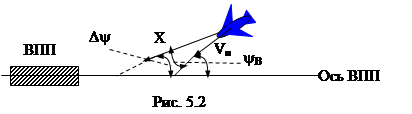
При движении самолета по курсовой линии в общем случае ось самолета повернута относительно оси ВПП на угол, равный по величине углу сноса yВ.
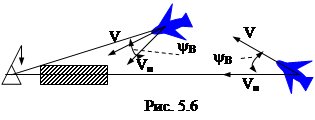
Основной задачей управления в боковом канале при приземлении является поворот оси самолета параллельно оси ВПП. Так как управление креном вблизи земли небезопасно, то такой разворот осуществляют подачей в канал РВ сигнала, пропорционального разности текущего курса и курса ВПП при стабилизированном угле крена (плоский разворот).
Основными возмущениями при заходе на посадку и при посадке являются атмосферные (чаще ветровые) и инструментальные в виде ошибок датчиков информации. По своему спектральному составу они могут быть разделены на низко- и высокочастотные. К низкочастотным составляющим относятся: вертикальная и горизонтальная составляющие ветра, инструментльные ошибки курсовых и глиссадных трактов и т.д. К высокочастотным относятся турбулентность атмосферы, порывы ветра, радиопомехи, содержащиеся в спектре сигналов курсового и глиссадного маяков.
Низко и высокочастотные помехи, содержащиеся в сигналах курсоглиссадных систем, существенно снижают точность стабилизации самолета на глиссаде.

