 2014-02-09
2014-02-09 1741
1741Одна из фундаментальных задач, решаемых автоматикой, заключается в стабилизации выхода динамической системы. Предназначенные для этой цели устройства называются системами автоматического регулирования (САР). Известны два основных принципа действия САР: принцип компенсации возмущения и принцип регулирования по отклонению стабилизируемого параметра. Проще, по крайней мере в идейном плане, компепсационные САР (системы, использующие принцип регулирования по отклонению, будут рассмотрены позднее). Если взять за основу обобщенную схему адаптивной системы (рис. 17)
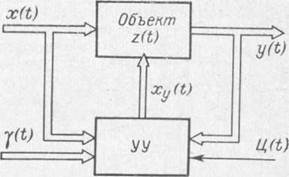
Рис. 17. Преобразованная обобщенная схема адаптивной системы.
и отбросить на ней стрелки Д(0 и связь от выхода объекта y(t) к управляющему устройству, то получим обобщенную схему САР компенсационного типа (рис. 18).
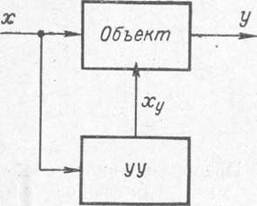
Рис. 18. Обобщенная схема САР компенсационного типа.
Входом х здесь является возмущающее воздействие, вызывающее изменение выхода у. Оно же воспринимается управляющим устройством, задача которого сводится к выработке управляющего воздействия х7, компенсирующего возмущение.
Простым примером такой системы является схема температурной компенсации частоты настройки колебательного контура, основанная на введении в колебательный контур дополнительного термокомпенсирующего конденсатора.
Резонансная частота колебательного контура выражается соотношением
(6)
 |
и, естественно, будет стабильной, если не изменяются значения индуктивности L и емкости С. Но у существующих катушек самоиндукции и конденсаторов обычно повышение температуры приводит к некоторому увеличению индуктивности и емкости. И то и другое вызывает снижение резонансной частоты колебательного контура.
Наряду с обычными разработаны специальные конденсаторы, у которых при повышении температуры емкость заметно уменьшается. Вводя в колебательный контур такой конденсатор (пусть это будет С2 на рис. 19), можно скомпенсировать влияние температуры на резонансную частоту. Для этого в общем случае достаточно добиться постоянства произведения LC, или, поскольку в данном случае , постоянства величины
, постоянства величины
 (7)
(7)
Пусть при повышении температуры на АТ индуктивность L получает приращение AL, емкость основного конденсатора Сі — приращение ДСь а емкость компенсирующего конденсатора С2 — приращение АС2. Тогда условие компенсации примет вид:
 (8)
(8)
отсюда определим необходимое приращение :
:
 (9)
(9)
Подставляя в эту формулу значения и
и , соответствующие различным приращениям температуры, можно вычислить необходимые приращения емкости компенсирующего конденсатора АС2 и тем самым определить требуемую температурную зависимость его емкости.
, соответствующие различным приращениям температуры, можно вычислить необходимые приращения емкости компенсирующего конденсатора АС2 и тем самым определить требуемую температурную зависимость его емкости.
Вообще говоря, создать конденсатор со строго заданной зависимостью емкости от температуры практически невозможно. Поэтому условие (9) удается выполнять лишь в двух-трех точках рабочего диапазона температур, а в остальных точках происходит либо недокомпенсация, либо перекомпенсация.
Можно отметить и другие недостатки этого устройства. Необходимый эффект достигается лишь при знании точных значений всех параметров компенсируемой схемы L, Си С2, AL, ДСи подставляемых в расчетную формулу (9), и сохраняется до тех пор, пока эти значения не изменятся. На практике же вследствие технологического разброса все параметры могут в той или иной мере отличаться от номинальных или расчетных значений, и, кроме того, изменяться по мере старения деталей. Это зачастую требует трудоемкой экспериментальной настройки устройств компенсации и периодической подстройки их в процессе эксплуатации. Наконец, изменения некоторых параметров, присутствующих в уравнении компенсации, могут быть необходимы для то-. го, чтобы устройство выполняло свое основное назначение. Так, колебательные контуры в радиоприемнике должны перестраиваться при приеме радиостанций, работающих на различных частотах. Обычно это осуществляется применением конденсатора переменной емкости. Тогда величина С[ в уравнении (9) будет переменной, и при настройке на разные частоты потребуются различные приращения ДС2. В таких случаях компенсационные устройства рассчитываются на некоторое среднее значение переменного параметра и при отклонении параметра от этого значения их эффективность заметно ухудшается.
Перечисленные недостатки типичны не только для схемы температурной компенсации частоты, но и для всех САР компенсационного типа. Причина их кроется в том, что управляющее устройство получает информацию только о возмущающем воздействии и не учитывает истинного значения стабилизируемого выхода (на рис. 18 нет связи управляющего устройства с выходом у).
Обращаясь к общей схеме компенсационной САР (рис. 18), можно отождествить вход х с приращением температуры AT; объект управления — с совокупностью параметров L, Си С2 и переменных состояния AL, ДСі; выход у — с резонансной частотой f, а управляющее воздействие ху — с приращением ДС2. Разомкнутые системы автоматического регулирования и управления
Лекция
Система автоматического регулирования усиления (АРУ) «вперед»
Другой пример САР, соответствующей этой же схеме, — система автоматического регулирования усиления (АРУ) «вперед». Структурная схема этого типа АРУ изображена на рис.
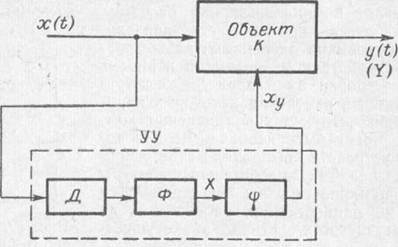 Рис. Структурная схема системы АРУ «вперед». Д —детектор; Ф — фильтр; Рис. Структурная схема системы АРУ «вперед». Д —детектор; Ф — фильтр;  р —нелинейный функциональный преобразователь. р —нелинейный функциональный преобразователь. |
Объектом управления здесь является регулятор коэффициента усиления К, введенный в один из каскадов усилительного устройства, входом — усиливаемый сигнал x(t), выходом— уровень Y выходного сигнала y(t). Управляющее устройство включает в себя датчик уровня входного сигнала (детектор Д со сглаживающим фильтром Ф, который выделяет постоянную составляющую напряжения, X) и устройство (р, управляющее работой регулятора коэффициента усиления.
Главной переменной объекта является коэффициент усиления К, испытывающий на себе управляющее воздействие ху со стороны управляющего устройства:

Конкретный вид зависимости К от ху определяется техническим воплощением регулятора усиления. Однако для поддержания постоянного уровня выходного сигнала (y=y0=const) при различных уровнях входного сигнала (X) надо, чтобы величина К изменялась обратно пропорционально, значению Х.

ибо Y=KX.
Поэтому управляющее устройство должно осуществлять такое преобразование входного сигнала x(t) в управляющее воздействие  , которое с учетом конкретного вида функции обеспечит хорошее приближение зависимости К от X к необходимому виду. Этой цели и служит обозначенный на рис. символом
, которое с учетом конкретного вида функции обеспечит хорошее приближение зависимости К от X к необходимому виду. Этой цели и служит обозначенный на рис. символом  блок, называемый функциональным преобразователем. Заметим, что даже в самом простом случае, когда регулятор обладает линейной характеристикой управления, т. е. функция имеет вид
блок, называемый функциональным преобразователем. Заметим, что даже в самом простом случае, когда регулятор обладает линейной характеристикой управления, т. е. функция имеет вид
K—a+bXy,
преобразователь  должен быть нелинейным устройством и вырабатывать управляющее воздействие в зависимости от величины X по формуле:
должен быть нелинейным устройством и вырабатывать управляющее воздействие в зависимости от величины X по формуле:
Как и в системе тсрмокомпенсацнп, здесь надо точно знать ряд параметров объекта (а, b), с большой точностью реализовать необходимые характеристики управляющего устройства и добиться высокой стабильности этих характеристик в процессе эксплуатации. В противном случае компенсация будет неполной и появится статическая погрешность.
Статическими называются ошибки, наблюдаемые при неиз^ менной величине возмущающих воздействий. Наряду с такими ошибками могут возникать динамические — сопровождающие изменения состояния САР при всяком изменении возмущения.
В САР компенсационного типа динамические ошибки возникают при условии, что объект и управляющее устройство реагируют на возмущение с разной инерцией. В рассмотренной раньше системе термокомпенсации динамическая ошибка возникает при быстром изменении температуры, если катушка самоиндукции, основной конденсатор и компенсирующий с разной скоростью нагреваются или охлаждаются. Однако, если температура окружающего воздуха приняла новое значение и перестала изменяться, то со временем и все детали примут эту температуру, после чего динамическая ошибка исчезнет.
В системе АРУ «вперед» (рис.) природа динамических ошибок иная. Здесь возмущающее воздействие (изменение уровня входного сигнала) безынерционно проникает на выход. Управляющее же устройство сделать безынерционным нельзя, так как для измерения уровня заранее неизвестного сигнала надо наблюдать за ним в течение некоторого времени, чтобы отличить изменение уровня от изменений мгновенных значений напряжения собственно сигнала. Это и делает детектор Д с фильтром Ф, который сглаживает пульсацию мгновенных значений.
Простейшим сглаживающим фильтром служит RC-цепочка (рис.), называемая в автоматике инерционным звеном первого порядка.
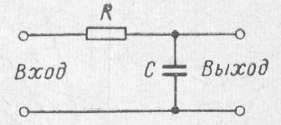
Рис. Простейший сглажвиающий фильтр — инерционное звено первого порядка.
Ее инерционность определяется постоянной времени
 = RC. (12)
= RC. (12)
Величина (в секундах, если R — в омах, а С—в фарадах) равна времени, в течение которого конденсатор заряжается до 73% напряжения, поданного на вход цепочки. Практически заряд конденсатора заканчивается за время (3—5) т. Именно в течение такого времени после скачкообразного изменения уровня входного сигнала будет происходить постепенное изменение коэффициента усиления в системе АРУ до нового значения. Этот период называется переходным процессом и, пока он не закончится, существует динамическая ошибка. Изменение динамической ошибки в течение переходного процесса, вызванного скачкообразным изменением входного воздействия, описывается переходной характеристикой, форма которой считается в автоматике одним из важнейших показателей качества автоматической системы. Типичные формы переходных характеристик показаны на рис.
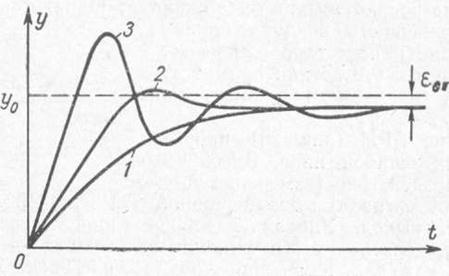
Рис. Типичные формы отклика автоматических систем на скачкообразное возмущающее воздействие: 1 — апериодическая, 2 —с одним выбросом, 3 — колебательная.
ест-статическая ошибка; уа — желаемое значение выхода.
Характер переходного процесса существенно зависит от инерционных свойств элементов САР, в частности от типа примененных в ней фильтрующих цепей (числа реактивных элементов).
Вторая важнейшая задача, решаемая средствами автоматики,— автоматическое изменение выхода динамической системы в зависимости от определенных, контролируемых автоматической системой, условий. Устройства, выполняющие такую функцию, называются системами автоматического управления (САУ).
К наиболее простым САУ относятся устройства, построенные по схеме, которая приведена на рис.
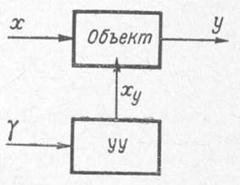
Рис. Структурная схема простейшей САУ.
Здесь управляющее устройство УУ воспринимает сигналы у. в зависимости от которых должен изменяться выход у управляемого объекта, и перерабатывает эти сигналы в необходимое управляющее воздействие Ху. Легко обнаружить, что эта схема также является частным случаем обобщенной схемы.
Примером такой САУ служит устройство автоматического регулирования яркости (АРЯ) монитора или экрана телевизионных приемников, изменяющее яркость изображения в зависимости от освещенности в комнате. Такое управление осуществляется очень просто. Яркость зависит от напряжения между катодом и управляющим электродом кинескопа (Uу на рис.).
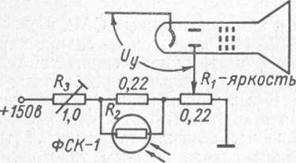
Рис. Принципиальная схема устройства АРЯ.
Ручная регулировка яркости производится с помощью потенциометра R1 на который поступает постоянное напряжение от источника +150 в. Параллельно сопротивлению R2 подключен фоторезистор ФСК-1, установленный на передней панели монитора или телевизора. Чем выше освещенность в комнате, тем меньше сопротивление фоторезистора и тем выше потенциал, подаваемый с движка потенциометра R\ па управляющий электрод кинескопа.
Сходный принцип действия положен в основу устройства автоматической установки диафрагмы в фото- и видеокамерах (рис.).
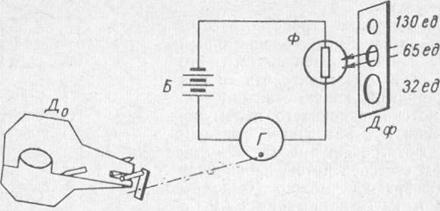
Рис. Схема устройства автоматической установки диафрагмы в фотоаппарате.
Задача этого устройства сводится к изменению отверстия диафрагмы в зависимости от освещения и светочувствительности пленки. Как и в устройстве АРЯ, здесь используется фоторезистор Ф, являющийся датчиком освещенности.
Через этот фоторезистор замыкается цепь питания рамки гальванометра Г от батарейки Б. С вращающейся осью рамки гальванометра связан механизм привода двухлепестковой диафрагмы До, ограничивающей световой поток, который проходит через объектив камеры. С увеличением освещенности уменьшается сопротивление фоторезистора, увеличивается ток через рамку гальванометра, рамка отклоняется на больший угол, что приводит к большему смыканию серповидных лепестков диафрагмы.
Если бы такое устройство рассчитывалось на применение пленки одной определенной чувствительности, то его можно было бы трактовать и как САР, стабилизирующую величину светового потока, падающего на эмульсию пленки при различных освещен - ностях фотографируемого объекта. При этом световой поток, прошедший через диафрагму, можно было бы принять в качестве выхода САР, а изменения средней освещенности объекта — за возмущающее воздействие. Для точной работы такой системы управляющее устройство должно изменять площадь отверстия диафрагмы обратно пропорционально величине освещенности
При работе с пленками различной чувствительности нужен в каждом случае разный световой поток и задачей системы становится не стабилизация его, а управление, устройство явно должно быть отнесено к категории САУ. Тогда за выход системы можно принять площадь отверстия диафрагмы До- Для того чтобы эта величина зависела не только от освещенности, но и от чувствительности пленки, перед фоторезистором устанавливается диафрагма Дф с калиброванными отверстиями, уменьшающими световой поток, падающий на активную поверхность фоторезистора, пропорционально чувствительности пленки. Таким образом, установкой диафрагмы Дф в нужное положение можно согласовать действующую чувствительность фоторезистора с чувствительностью применяемой пленки.
Процедуру выбора действующей чувствительности фоторезистора, приводящую к изменению зависимости устанавливаемого САУ отверстия диафрагмы До от освещенности, можно истолковывать как изменение цели САУ. Структурная схема такого устройства показана на рис.
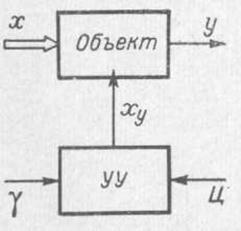
Рис. 26. Структурная схема САУ с задаваемой целью управления.
В рассмотренном устройстве контролируемым условием Y является средняя освещенность фотографируемого объекта, выходом у — площадь отверстия диафрагмы, целью Ц — указание о величине светочувствительности пленки. В качестве управляющего воздействия можно принять любую промежуточную неременную в последовательности: сопротивление фоторезистора— ток через рамку гальванометра — угол поворота рамки — положение частей механизма привода диаграфмы До — положение лепестков диафрагмы До. В качестве входа х выступают все, не компенсируемые системой возмущающие воздействия. Это — отклонение освещенности фотографируемого объекта от средней освещенности кадра, отклонение поля зрения съемочного объектива от поля зрения фоторезистора, а также изменения трения во всех подвижных частях механизма диафрагмы До и изменения напряжения батарейки Б.
Как и в компенсационных САР, в разомкнутых САУ требуется точное знание характеристик объекта управления, тщательный расчет функциональных преобразований, осуществляемых управляющим устройством, и высокая стабильность всех этих характеристик в процессе эксплуатации устройства. В противном случае системы такого типа будут работать с заметными погрешностями. Причина этого прежняя — отсутствие контроля истинных значений выхода.
Лекция








