 2014-02-09
2014-02-09 1395
1395Микропроцессорные цифровые частотомеры.
Применение систем на основе микропроцессоров цифровых частотомеров позволяют автоматизировать установку требуемого диапазона частот и вычислительные процедуры:
· нахождение значение частоты, обратное результату прямого измерения периода.
·
· Также позволяет формировать длительность временых ворот непосредственно на микропроцессоре
· программировать выполнение набора функций в многофункциональных приборах,
· обрабатывать результаты наблюдений,
·
· получать отображение результатов измерений в удобной форме,
· снижать потребляемую мощность.
Использование систем на основе микропроцессоров не исключает наличие в составе прибора набора стандартны блоков электронной техники:
- формирователь импульсов
- делители частоты
Стандартные блоки составляют аппаратную часть частотомера.
Если сравнивать с обычными приборами, которые содержат схемы с жесткой логикой, аппаратная часть сокращена, а также отпадает необходимость в электромеханической коммутации блоков для изменения функции прибора.
· необходимость совместной разработки и отладки цифрового устройства и программного обеспечения, ориентированного на конкретную структуру измерительной системы.
· использование принципиально новых методов отладки микропроцессорных систем и средств автоматизации программирования.
· сильная взаимосвязь этапов проектирования, требующая от разработчика цифровых устройств обладать одновременно опытом разработки приборов и умения разбираться в основны этапах проектирования технической реализации и программирования микропроцессорных средств.
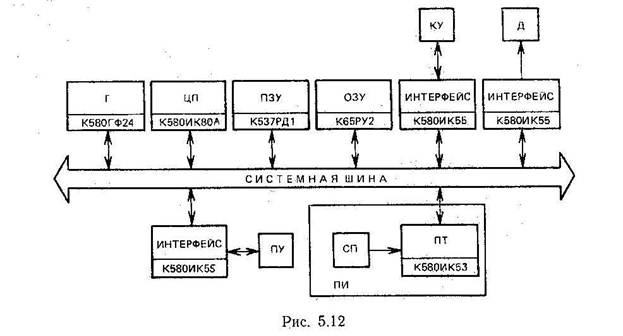
На рисунке 5.12 представлена структура специализированной микроЭВМ.
Данная система основана на основе базе микропроцессора серии КР580, а также нескольких дополнительных микросхем, указанных внизу каждого прямоугольника структурной схемы (шифры)
Структура микроЭВМ:
·
· Память, которая хранится в ПЗУ(постоянное запоминающее устройство). Состоит из 10кбайт.
· ОЗУ(оперативное запоминающее устройство). Ёмкость 1кб.
Позволяет записывать и считывать информацию для временного хранения данных.
· Входные и выходные порты данных, необходимые для подключения клавишного устройства (КУ) оператора системы, печатающего устройства (ПУ) и дисплея (Д).
· Генератор тактовых импульсов (Г). Вырабатывает сигналы для синхронизации операций внутри ЭВМ.
- адресной шины
- шины данных
- шины управления.
Особенность использования микроЭВМ совместно с ЦЧУ заключается в том, что АЦП - подсистема измерения (ПИ), реализован программно-аппаратным способом на одной микросхеме программируемого таймера (ПТ).
Структура АЦП указана на рисунке 5.13
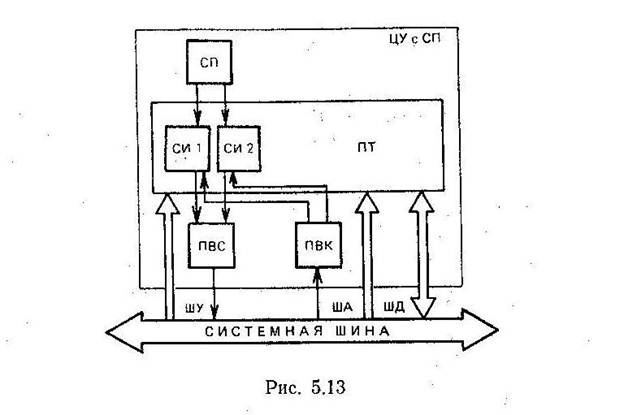
Его параметры nд, τ, f3 могут быть изменены в программируемый таймер программным путём и позволяют реализовать режим работы частоты (Ч)
Состояние блоков может быть проанализировано через порт ввода состояния (ПВС).
Управление блоками СИ1 и СИ2 осуществляется через порт вывода команды (ПВК).
При измерении частоты f1 и f2 подаются соответственно на входы блоков СИ1 и СИ2 таймера. С системной шины через ПВК блокируется работа счётчиков.
По ШД в блок СИ2 заносится значение nд – коэффициент деления. В исходном же состоянии выходы счётчиков находятся в нулевом положении.
После выполнения всех подготовительных операций через ПВК разрешается работа обоих счётчиков и анализируется состояние выхода блока СИ2.
Когда на блок СИ2 поступит нужное количество импульсов, равное nд, его выход перейдёт в единичное состояние. После чего через ПВК блокируется работа СИ1 и СИ2.
Количество импульсов Nx, поступившее на блок СИ1, будет соответствовать измеряемой величине х и может быть считано по ШД.








