 2015-01-30
2015-01-30 365
365Примечание:
Кинематическая пара существует, если не происходит деформации звеньев, образующих эту пару, и не должно происходить отрыва звеньев одно от другого, образующих кинематическую пару.
Примечание:
Ограничения, накладываемые на независимые движения звеньев, образующих кинематическую пару, называются – условия связи S.
Число степеней свободы механизма
W=S+H,
где Н – подвижность.
Любое незакрепленное тело в пространстве имеет 6 степеней свободы, на плоскости – 3.
Классификация кинематических пар проводят либо числу связей, либо по числу подвижностей:
Число связей Класс КП Число подвижностей
S=1 P I H=5
S=2 P II H=4
S=3 P III H=3
S=4 P IV H=2
S=5 P V H=1
Существует 5 классов кинематических пар.
Примеры различных КП смотри рис. 4-95.
Кинематические пары по характеру контакта звеньев, образующих КП, разделяют на:
1. низшие:
· вращательные;
· поступательные;
2. высшие.
Контакт звеньев в низшей КП осуществляется по поверхности. Контакт звеньев в высшей КП – либо по линии, либо в точке.
§1.2 Определение числа степеней свободы рычажных механизмов.
1.2.1 Плоские механизмы.
В плоском механизме все звенья движутся в одной плоскости, все оси параллельны друг другу и перпендикулярны плоскости механизма.
ФОРМУЛА ЧЕБЫШЕВА: W пп =3n -2p н -p в ,
Где n – число подвижных звеньев механизма, рн – число низших КП, рв – число высших КП.
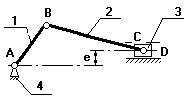
n=3
pн=4
рв=0
W=3.3-2.2=1
Рис.1.2.1








