 2015-01-30
2015-01-30 680
680Перед началом работы в режиме «Балансировка в 4-х плоскостях» необходимо установить датчики вибрации 1, 2, 3 и 4 на корпусе машины в выбранных точках измерения и подключить их соответственно к входам Х1, Х2, Х3, Х4 измерительного блока.
Оптический датчик фазового угла необходимо подключить к входу Х5 измерительного блока. Кроме того, для использования этого датчика на доступную поверхность ротора балансируемой машины необходимо нанести специальную метку, имеющую отражающую способность, контрастную по отношению к отражающей способности поверхности ротора.
Подробные требования по выбору места установки датчиков и их креплению на объекте при балансировке изложены в приложении 1.
Работа по программе в режиме “ Балансировка в 4-х плоскостях " начинается из Главного рабочего окна программы.
Для этого первоначально необходимо «щёлкнуть мышкой» по кнопке «F12-четырёхплоскостная» ( или нажать клавишу F12 на клавиатуре компьютера ).
Подтверждением того, что выбран режим балансировки в одной плоскости, является появление на дисплее компьютера мнемосхемы, представленной на рис. 7.4 и иллюстрирующей процесс измерения амплитуды и фазы вибрации по первому и второму третьему и четвёртому измерительным каналам.
Далее в Главном рабочем окне программы необходимо «щёлкнуть мышкой» по кнопке «F7 – Балансировка», после чего на дисплее компьютера появится рабочее окно (см. рис. 7.27), используемое для ввода исходных данных при балансировке.
В данном окне первоначально выбирается один из возможных вариантов балансировки – «Первичная» или «Повторная» балансировка.
«Первичная» балансировка обычно выполняется для роторов машин, которые ранее не балансировались и для которых в архивной памяти компьютера отсутствует информация, необходимая для проведения «Повторной» балансировки (численные значения коэффициентов балансировки и массы пробного груза).
При выполнении «Первичной» балансировки в 3-х плоскостях, требуется проведение четырёх пусков машины, необходимых для тарировки измерительной системы прибора.
При этом во время первого пуска определяется исходная вибрация машины. Второй пуск машины выполняется после установки на ротор пробного груза в первой балансировочной плоскости. Третий пуск машины выполняется после установки на ротор пробного груза во второй балансировочной плоскости. Четвёртый пуск машины выполняется после установки на ротор пробного груза во третьей балансировочной плоскости.
«Повторная» балансировка может выполняться только для уже ранее отбалансированной машины, для которой определены и занесены в память прибора масса пробного груза и коэффициенты балансировки. В этом случае для определения масс и мест установки корректирующих грузов, необходимых для компенсации дисбаланса, требуется всего один пуск ротора балансируемой машины.
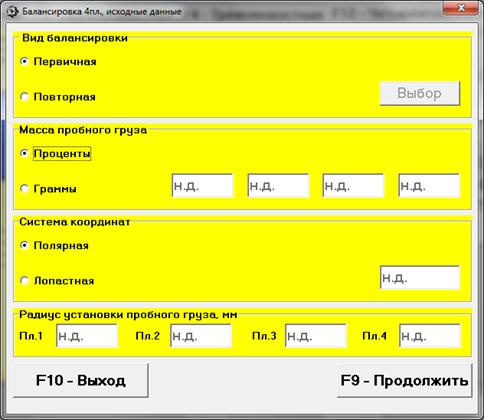
Рис. 7.27. Рабочее окно для ввода исходных данных при балансировке
в четырёх плоскостях.








