2015-01-30
2015-01-30 564
564
Рассмотрим две системы отсчета: неподвижную (К) и движущуюся относительно первой вдоль оси Х с постоянной Х с постоянной скоростью  (K’). Координаты тела М в системе К x:y:z, а в системе К’ - x’:y’:z’. Эти координаты связаны между собой соотношениями, которые называються преообразованием Галилея
(K’). Координаты тела М в системе К x:y:z, а в системе К’ - x’:y’:z’. Эти координаты связаны между собой соотношениями, которые называються преообразованием Галилея

Дифференцируя эти уравнения по времени и учитывая, что  , найдем соотношения между скоростями и ускорениями:
, найдем соотношения между скоростями и ускорениями:

| 
|

| 
|

| 
|
Таким образом, если в системе К тело имеет ускорение а, то такое же ускорение оно имеет и в системе К’.
Согласно второму закону Ньютона:

т.е. второй закон Ньютона одинаков в обоих случаях.
При  движение по инерции, т.о., справедлив и первый закон Ньютона, т.е. рассматриваемая нами подвижная система является инерциальной. Следовательно, уравнения Ньютона для материальной точки, а также для произвольной системы материальных точек одинаковы во всех инерциальных системах отсчета - инвариантны по отношению к преобразованиям Галилея. Этот результат называется механическим принципом относительности (принцип относительности Галилея), и формулируется следующим образом: равномерное и прямолинейное движение (относительно какой-либо инерциальной системы отсчета) замкнутой системы не влияет на закономерности протекания в ней механических процессов. Следовательно, в механике все инерциальные системы отсчета совершенно равноправны. Поэтому никакими механическими опытами внутри системы нельзя обнаружить движется ли система равномерно и прямолинейно или покоится.
движение по инерции, т.о., справедлив и первый закон Ньютона, т.е. рассматриваемая нами подвижная система является инерциальной. Следовательно, уравнения Ньютона для материальной точки, а также для произвольной системы материальных точек одинаковы во всех инерциальных системах отсчета - инвариантны по отношению к преобразованиям Галилея. Этот результат называется механическим принципом относительности (принцип относительности Галилея), и формулируется следующим образом: равномерное и прямолинейное движение (относительно какой-либо инерциальной системы отсчета) замкнутой системы не влияет на закономерности протекания в ней механических процессов. Следовательно, в механике все инерциальные системы отсчета совершенно равноправны. Поэтому никакими механическими опытами внутри системы нельзя обнаружить движется ли система равномерно и прямолинейно или покоится.
| 7.Упругие силы. Диаграмма растяжения твердого тела | |
Электромагнитные силы в механике проявляют себя как упругие силы и силы трения.
Под действием внешних сил возникают деформации (т.е. изменение размеров и формы) тел. Если после прекращения действия внешних сил восстанавливаются прежние форма и размеры тела, то деформация называется упругой. Деформация имеет упругий характер в случае, если внешняя сила не превосходит определенного значения, называемого пределом упругости.
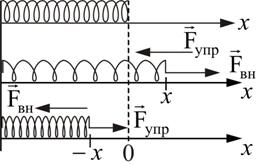
При превышении этого предела деформация становится пластичной, или неупругой, т.е. первоначальные размеры и форма тела полностью не восстанавливаются. Рассмотрим упругие деформации. В деформированном теле (рис. 4.2) возникают упругие силы, уравновешивающие внешние силы. Под действием внешней силы – F вн пружина получает удлинение x, в результате в ней возникает упругая сила – F упр, уравновешивающая F вн.
Упругие силы возникают во всей деформированной пружине. Любая часть пружины действует на другую часть с силой упругости F упр. Удлинение пружины пропорционально внешней силе и определяется законом Гука:
k – жесткость пружины. Видно, что чем больше k, тем меньшее удлинение получит пружина под действием данной силы.
Так как упругая сила отличается от внешней только знаком, т.е. F упр = – F вн, закон Гука можно записать в виде
Потенциальная энергия упругой пружины равна работе, совершенной над пружиной. d A = – kx d x. Тогда полная работа, которая совершена пружиной, равна:
|


 ,
,